 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape Reconstruction by Learning Differentiable Surface Representations
Nov 25, 2019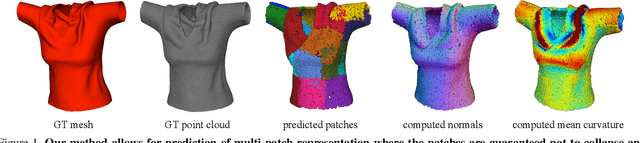
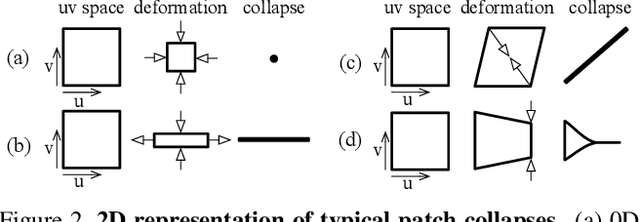
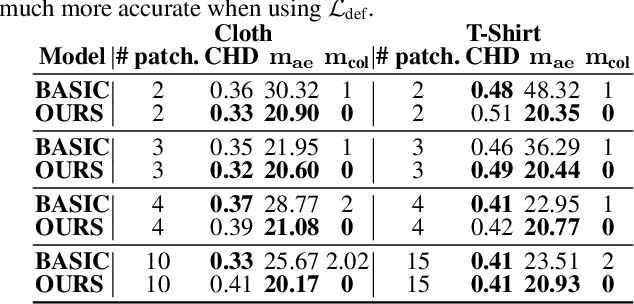
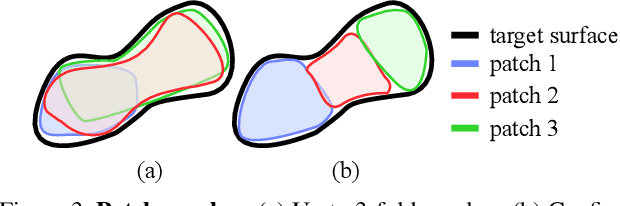
Generative models that produce point clouds have emerged as a powerful tool to represent 3D surfaces, and the best current ones rely on learning an ensemble of parametric representations. Unfortunately, they offer no control over the deformations of the surface patches that form the ensemble and thus fail to prevent them from either overlapping or collapsing into single points or lines. As a consequence, computing shape properties such as surface normals and curvatures becomes difficult and unreliable. In this paper, we show that we can exploit the inherent differentiability of deep networks to leverage differential surface properties during training so as to prevent patch collapse and strongly reduce patch overlap. Furthermore, this lets us reliably compute quantities such as surface normals and curvatures. We will demonstrate on several tasks that this yields more accurate surface reconstructions than the state-of-the-art methods in terms of normals estimation and amount of collapsed and overlapped patches.
Estimating People Flows to Better Count them in Crowded Scenes
Nov 25, 2019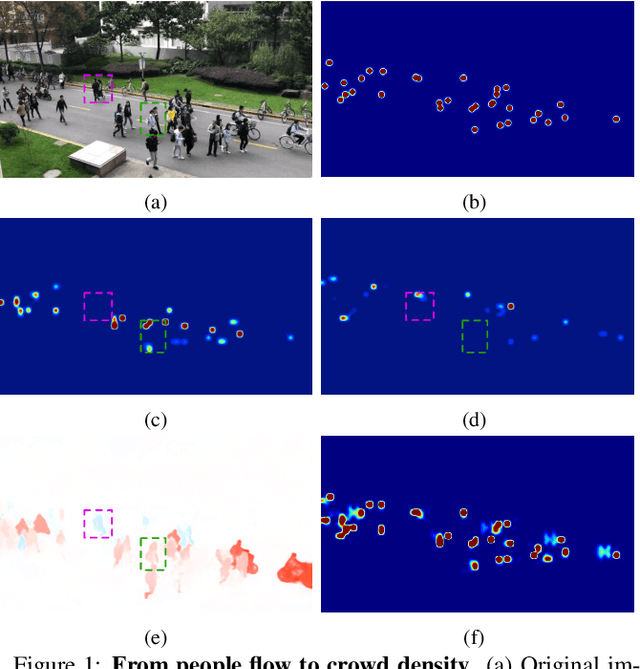
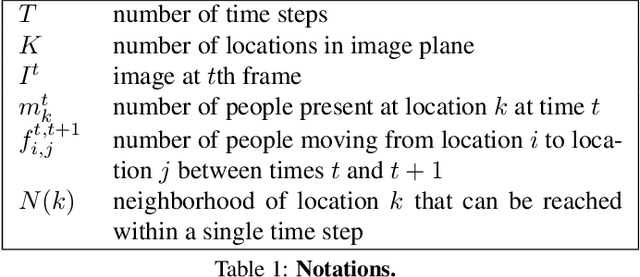
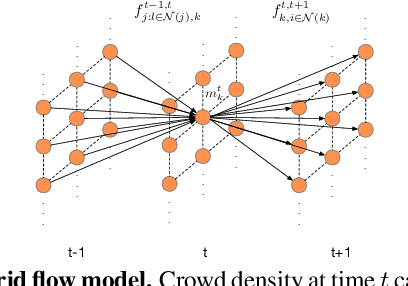

State-of-the-art methods for counting people in crowded scenes rely on deep networks to estimate people densities in individual images. As such, only very few take advantage of temporal consistency in video sequences, and those that do only impose weak smoothness constraints across consecutive frames. In this paper, we show that estimating people flows across image locations between consecutive images and inferring the people densities from these flows instead of directly regressing them makes it possible to impose much stronger constraints encoding the conservation of the number of people, which significantly boost performance without requiring a more complex architecture. Furthermore, it also enables us to exploit the correlation between people flow and optical flow to further improve the results. We will demonstrate that we consistently outperform state-of-the-art methods on five benchmark datasets.
Single-Stage 6D Object Pose Estimation
Nov 19, 2019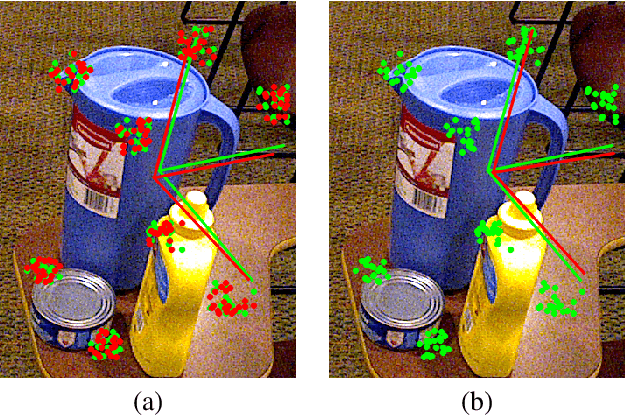
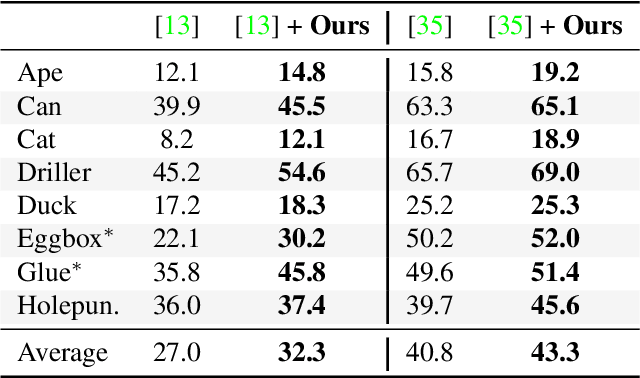
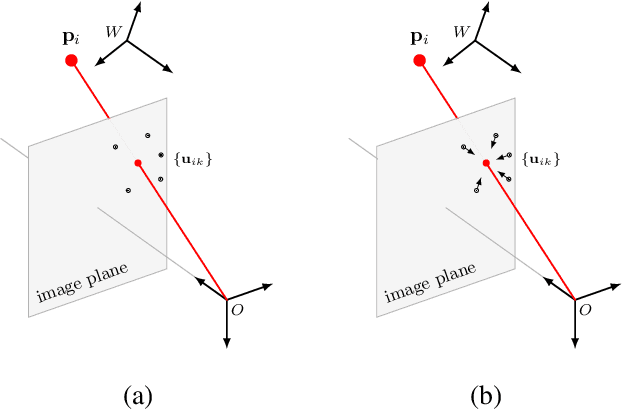
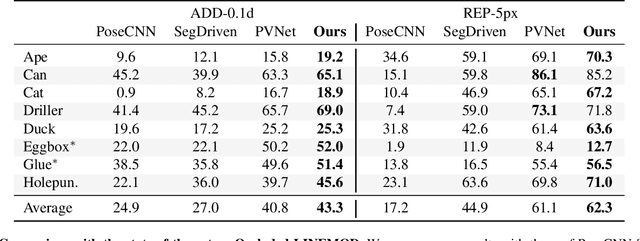
Most recent 6D pose estimation frameworks first rely on a deep network to establish correspondences between 3D object keypoints and 2D image locations and then use a variant of a RANSAC-based Perspective-n-Point (PnP) algorithm. This two-stage process, however, is suboptimal: First, it is not end-to-end trainable. Second, training the deep network relies on a surrogate loss that does not directly reflect the final 6D pose estimation task. In this work, we introduce a deep architecture that directly regresses 6D poses from correspondences. It takes as input a group of candidate correspondences for each 3D keypoint and accounts for the fact that the order of the correspondences within each group is irrelevant, while the order of the groups, that is, of the 3D keypoints, is fixed. Our architecture is generic and can thus be exploited in conjunction with existing correspondence-extraction networks so as to yield single-stage 6D pose estimation frameworks. Our experiments demonstrate that these single-stage frameworks consistently outperform their two-stage counterparts in terms of both accuracy and speed.
Field typing for improved recognition on heterogeneous handwritten forms
Sep 23, 2019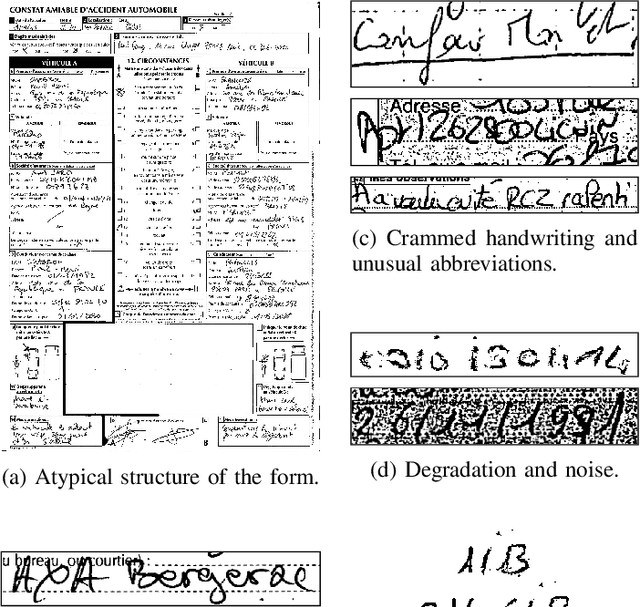
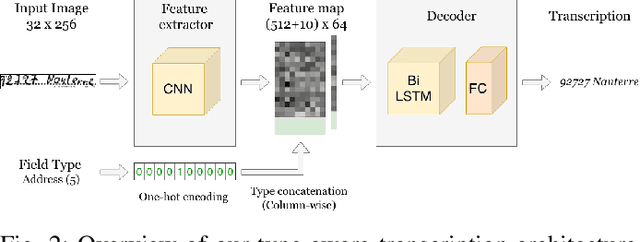
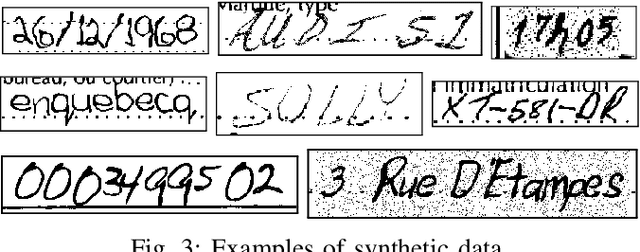
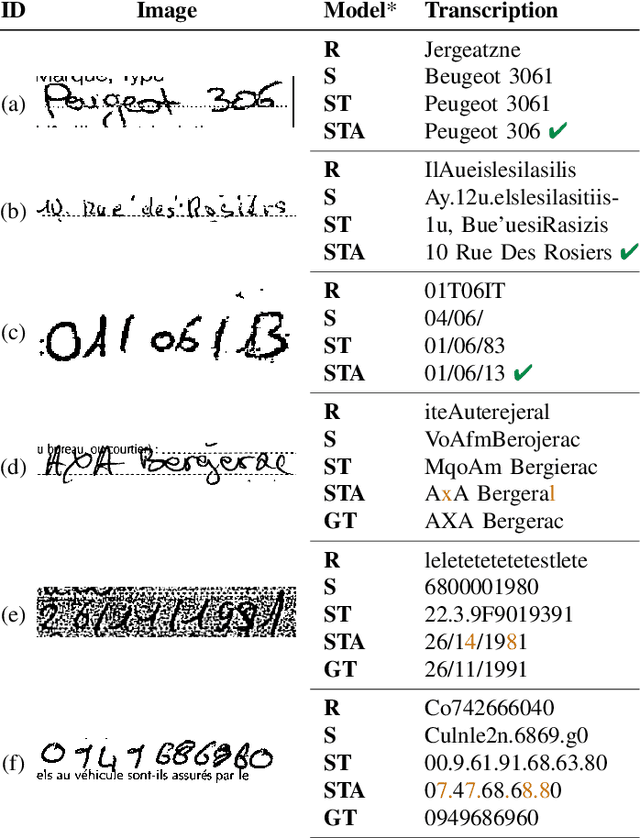
Offline handwriting recognition has undergone continuous progress over the past decades. However, existing methods are typically benchmarked on free-form text datasets that are biased towards good-quality images and handwriting styles, and homogeneous content. In this paper, we show that state-of-the-art algorithms, employing long short-term memory (LSTM) layers, do not readily generalize to real-world structured documents, such as forms, due to their highly heterogeneous and out-of-vocabulary content, and to the inherent ambiguities of this content. To address this, we propose to leverage the content type within an LSTM-based architecture. Furthermore, we introduce a procedure to generate synthetic data to train this architecture without requiring expensive manual annotations. We demonstrate the effectiveness of our approach at transcribing text on a challenging, real-world dataset of European Accident Statements.
Learning Trajectory Dependencies for Human Motion Prediction
Aug 16, 2019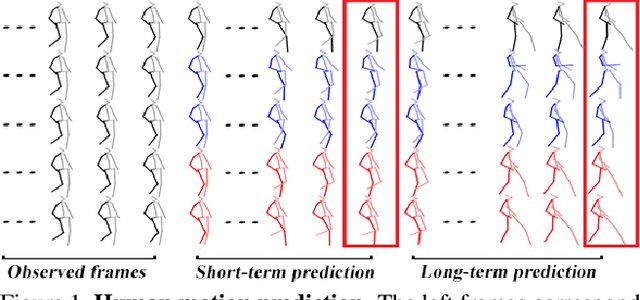
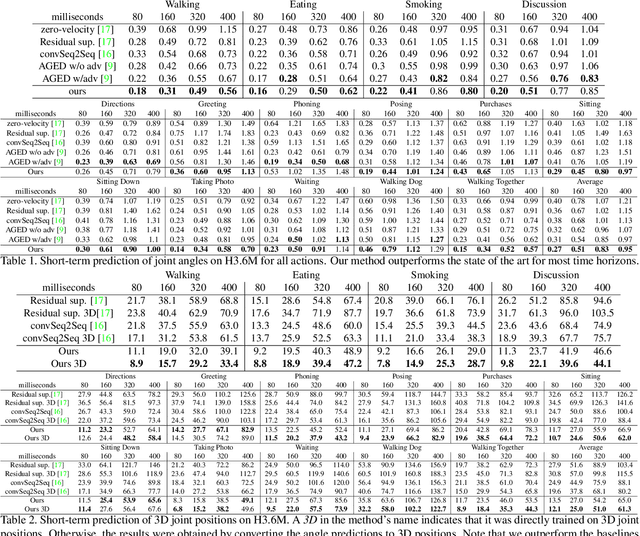
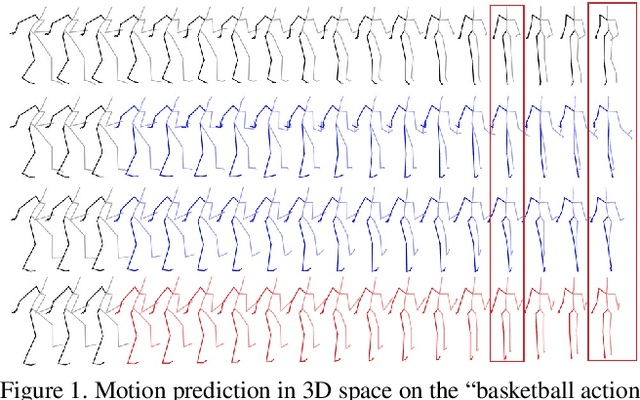
Human motion prediction, i.e., forecasting future body poses given observed pose sequence, has typically been tackled with recurrent neural networks (RNNs). However, as evidenced by prior work, the resulted RNN models suffer from prediction errors accumulation, leading to undesired discontinuities in motion prediction. In this paper, we propose a simple feed-forward deep network for motion prediction, which takes into account both temporal smoothness and spatial dependencies among human body joints. In this context, we then propose to encode temporal information by working in trajectory space, instead of the traditionally-used pose space. This alleviates us from manually defining the range of temporal dependencies (or temporal convolutional filter size, as done in previous work). Moreover, spatial dependency of human pose is encoded by treating a human pose as a generic graph (rather than a human skeletal kinematic tree) formed by links between every pair of body joints. Instead of using a pre-defined graph structure, we design a new graph convolutional network to learn graph connectivity automatically. This allows the network to capture long range dependencies beyond that of human kinematic tree. We evaluate our approach on several standard benchmark datasets for motion prediction, including Human3.6M, the CMU motion capture dataset and 3DPW. Our experiments clearly demonstrate that the proposed approach achieves state of the art performance, and is applicable to both angle-based and position-based pose representations. The code is available at https://github.com/wei-mao-2019/LearnTrajDep
Learning Variations in Human Motion via Mix-and-Match Perturbation
Aug 02, 2019
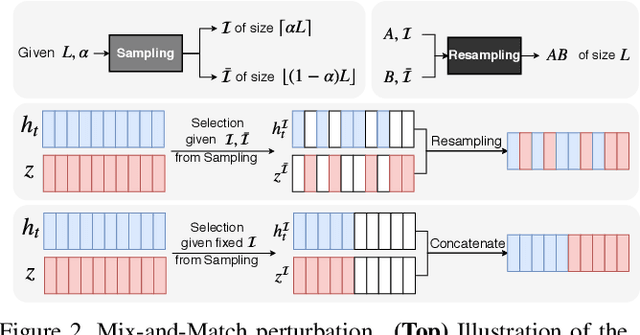
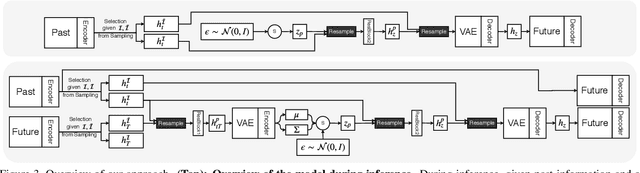
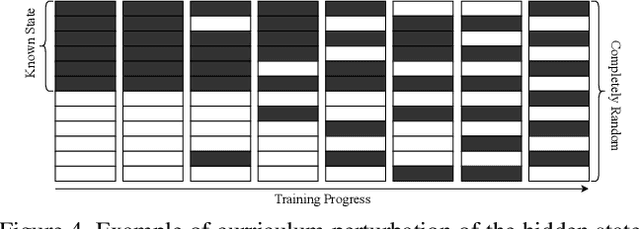
Human motion prediction is a stochastic process: Given an observed sequence of poses, multiple future motions are plausible. Existing approaches to modeling this stochasticity typically combine a random noise vector with information about the previous poses. This combination, however, is done in a deterministic manner, which gives the network the flexibility to learn to ignore the random noise. In this paper, we introduce an approach to stochastically combine the root of variations with previous pose information, which forces the model to take the noise into account. We exploit this idea for motion prediction by incorporating it into a recurrent encoder-decoder network with a conditional variational autoencoder block that learns to exploit the perturbations. Our experiments demonstrate that our model yields high-quality pose sequences that are much more diverse than those from state-of-the-art stochastic motion prediction techniques.
Self-supervised Training of Proposal-based Segmentation via Background Prediction
Jul 18, 2019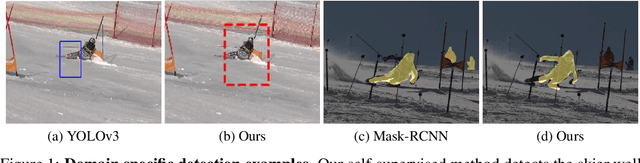
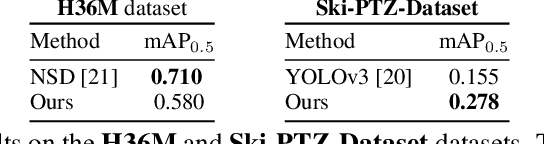
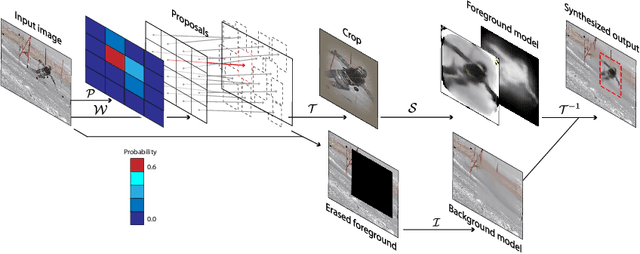
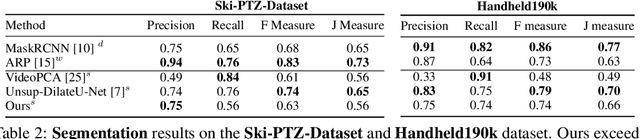
While supervised object detection methods achieve impressive accuracy, they generalize poorly to images whose appearance significantly differs from the data they have been trained on. To address this in scenarios where annotating data is prohibitively expensive, we introduce a self-supervised approach to object detection and segmentation, able to work with monocular images captured with a moving camera. At the heart of our approach lies the observation that segmentation and background reconstruction are linked tasks, and the idea that, because we observe a structured scene, background regions can be re-synthesized from their surroundings, whereas regions depicting the object cannot. We therefore encode this intuition as a self-supervised loss function that we exploit to train a proposal-based segmentation network. To account for the discrete nature of object proposals, we develop a Monte Carlo-based training strategy that allows us to explore the large space of object proposals. Our experiments demonstrate that our approach yields accurate detections and segmentations in images that visually depart from those of standard benchmarks, outperforming existing self-supervised methods and approaching weakly supervised ones that exploit large annotated datasets.
Backpropagation-Friendly Eigendecomposition
Jun 27, 2019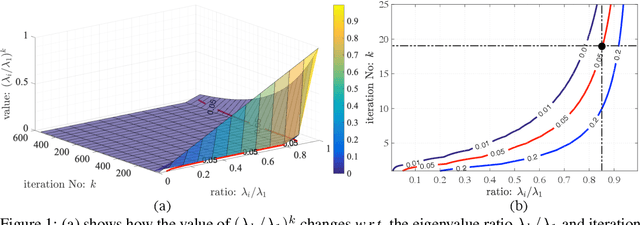
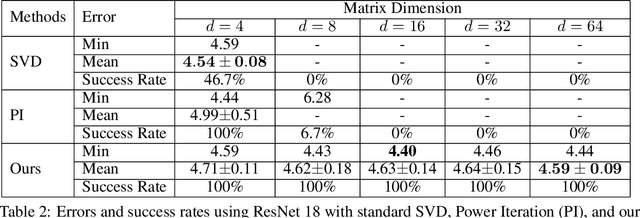
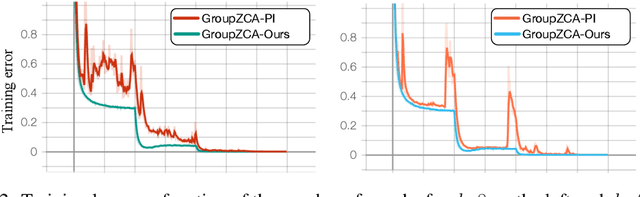

Eigendecomposition (ED) is widely used in deep networks. However, the backpropagation of its results tends to be numerically unstable, whether using ED directly or approximating it with the Power Iteration method, particularly when dealing with large matrices. While this can be mitigated by partitioning the data in small and arbitrary groups, doing so has no theoretical basis and makes its impossible to exploit the power of ED to the full. In this paper, we introduce a numerically stable and differentiable approach to leveraging eigenvectors in deep networks. It can handle large matrices without requiring to split them. We demonstrate the better robustness of our approach over standard ED and PI for ZCA whitening, an alternative to batch normalization, and for PCA denoising, which we introduce as a new normalization strategy for deep networks, aiming to further denoise the network's features.
Recurrent U-Net for Resource-Constrained Segmentation
Jun 11, 2019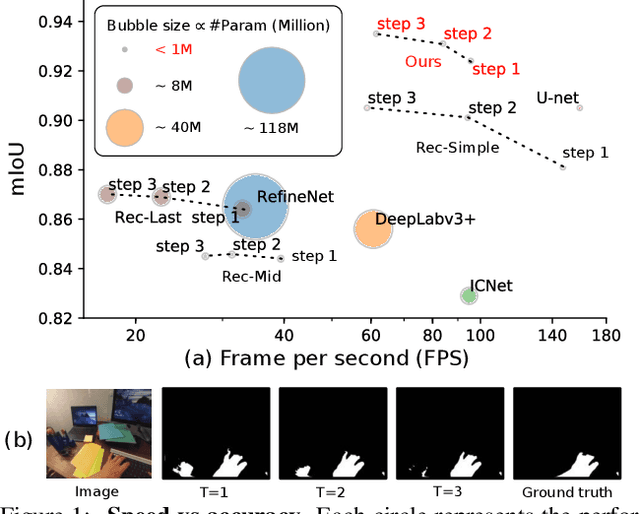
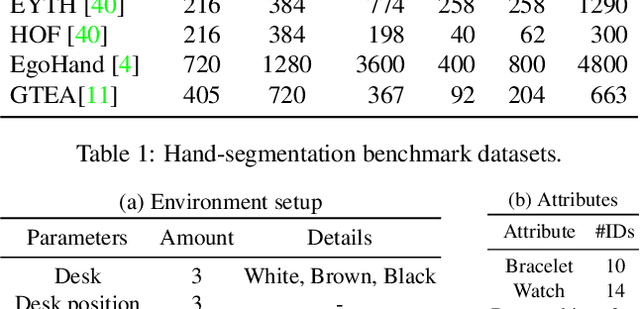
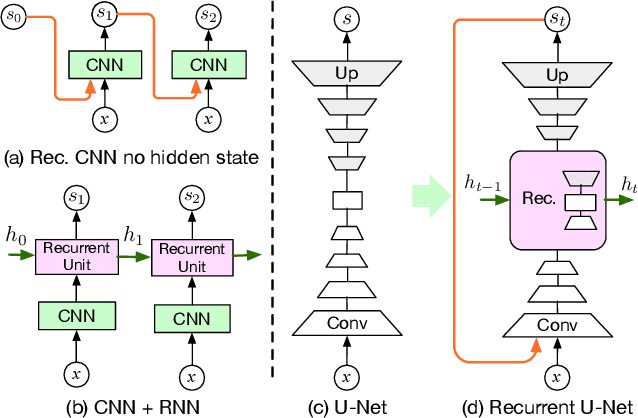
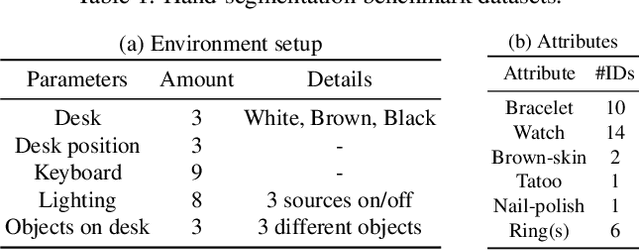
State-of-the-art segmentation methods rely on very deep networks that are not always easy to train without very large training datasets and tend to be relatively slow to run on standard GPUs. In this paper, we introduce a novel recurrent U-Net architecture that preserves the compactness of the original U-Net, while substantially increasing its performance to the point where it outperforms the state of the art on several benchmarks. We will demonstrate its effectiveness for several tasks, including hand segmentation, retina vessel segmentation, and road segmentation. We also introduce a large-scale dataset for hand segmentation.
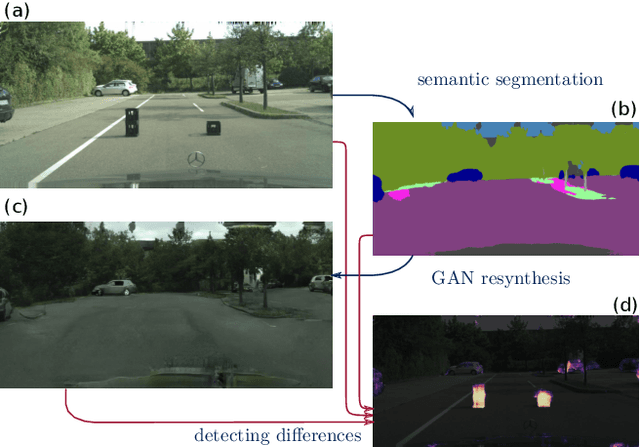
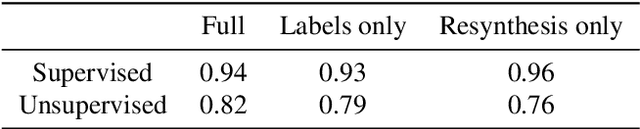
Detecting the Unexpected via Image Resynthesis
Apr 17, 2019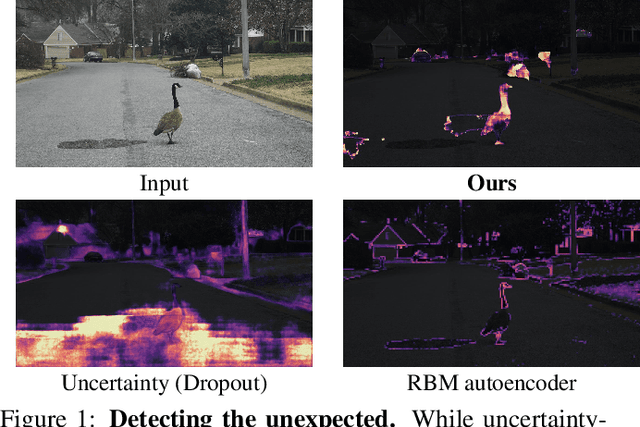
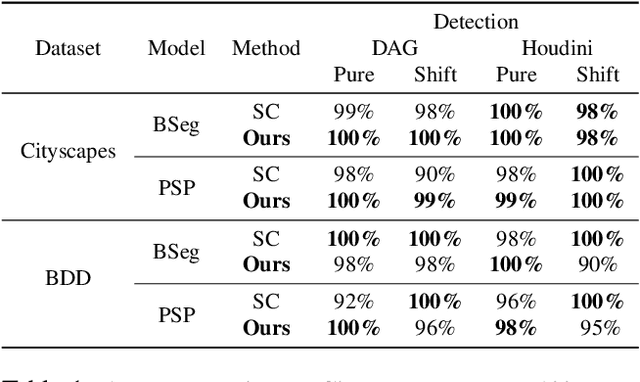
Classical semantic segmentation methods, including the recent deep learning ones, assume that all classes observed at test time have been seen during training. In this paper, we tackle the more realistic scenario where unexpected objects of unknown classes can appear at test time. The main trends in this area either leverage the notion of prediction uncertainty to flag the regions with low confidence as unknown, or rely on autoencoders and highlight poorly-decoded regions. Having observed that, in both cases, the detected regions typically do not correspond to unexpected objects, in this paper, we introduce a drastically different strategy: It relies on the intuition that the network will produce spurious labels in regions depicting unexpected objects. Therefore, resynthesizing the image from the resulting semantic map will yield significant appearance differences with respect to the input image. In other words, we translate the problem of detecting unknown classes to one of identifying poorly-resynthesized image regions. We show that this outperforms both uncertainty- and autoencoder-based methods.