 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Road Obstacles by Erasing Them
Dec 25, 2020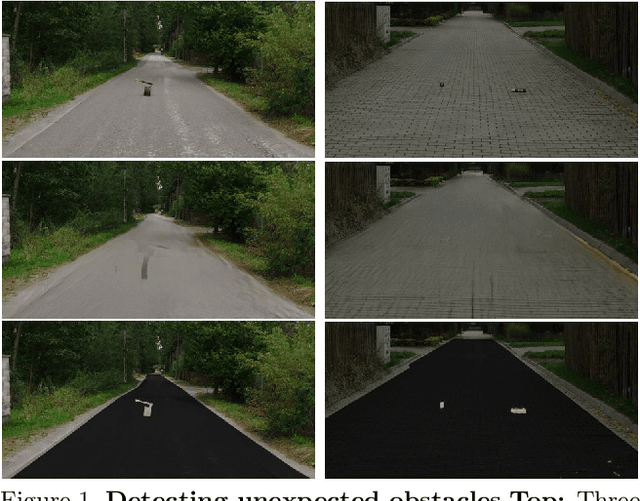
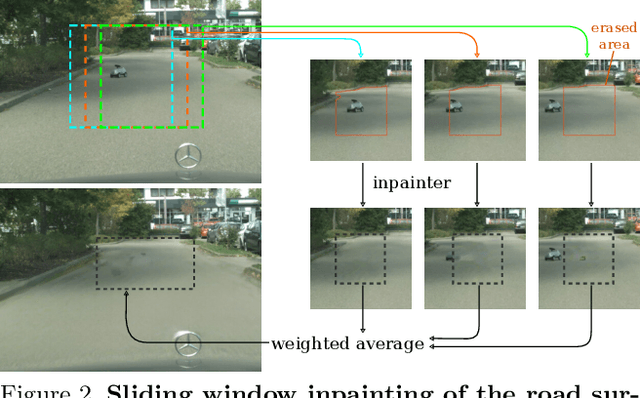
Vehicles can encounter a myriad of obstacles on the road, and it is not feasible to record them all beforehand to train a detector. Our method selects image patches and inpaints them with the surrounding road texture, which tends to remove obstacles from those patches. It them uses a network trained to recognize discrepancies between the original patch and the inpainted one, which signals an erased obstacle. We also contribute a new dataset for monocular road obstacle detection, and show that our approach outperforms the state-of-the-art methods on both our new dataset and the standard Fishyscapes Lost & Found benchmark.
Unsupervised Domain Adaptation with Temporal-Consistent Self-Training for 3D Hand-Object Joint Reconstruction
Dec 21, 2020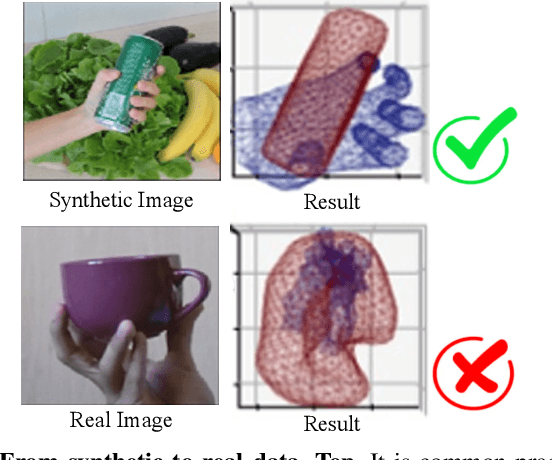
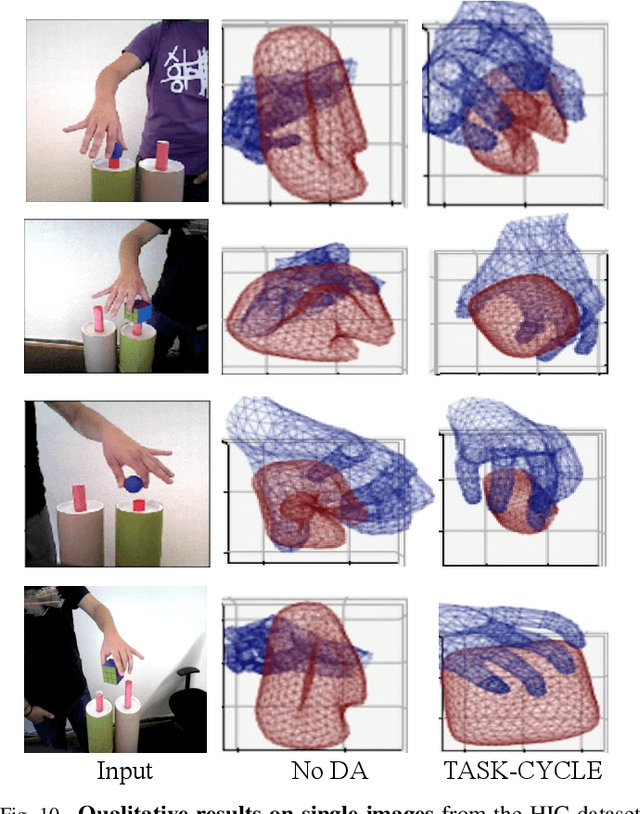
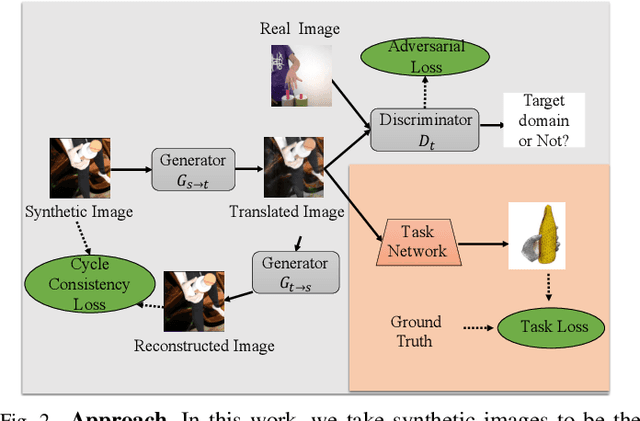
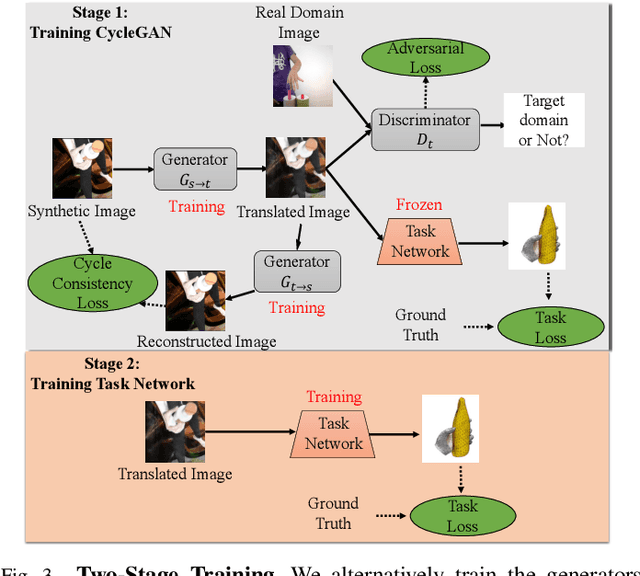
Deep learning-solutions for hand-object 3D pose and shape estimation are now very effective when an annotated dataset is available to train them to handle the scenarios and lighting conditions they will encounter at test time. Unfortunately, this is not always the case, and one often has to resort to training them on synthetic data, which does not guarantee that they will work well in real situations. In this paper, we introduce an effective approach to addressing this challenge by exploiting 3D geometric constraints within a cycle generative adversarial network (CycleGAN) to perform domain adaptation. Furthermore, in contrast to most existing works, which fail to leverage the rich temporal information available in unlabeled real videos as a source of supervision, we propose to enforce short- and long-term temporal consistency to fine-tune the domain-adapted model in a self-supervised fashion. We will demonstrate that our approach outperforms state-of-the-art 3D hand-object joint reconstruction methods on three widely-used benchmarks and will make our code publicly available.
Probabilistic Tracklet Scoring and Inpainting for Multiple Object Tracking
Dec 10, 2020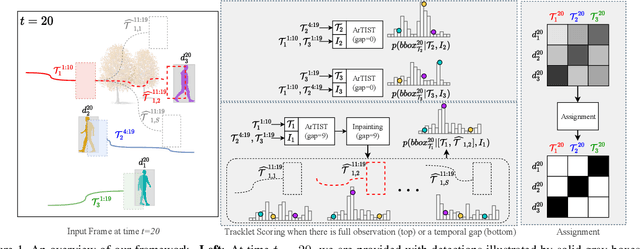
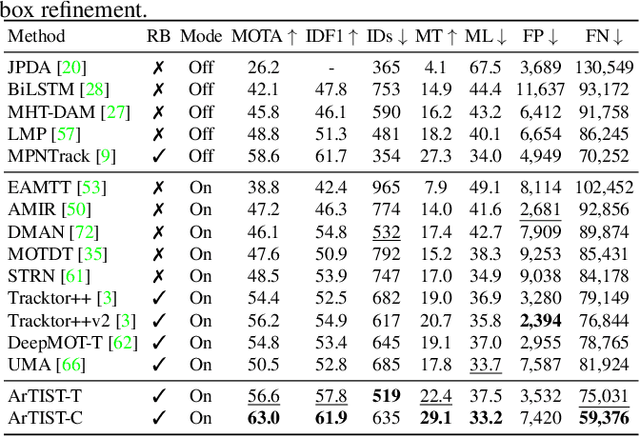
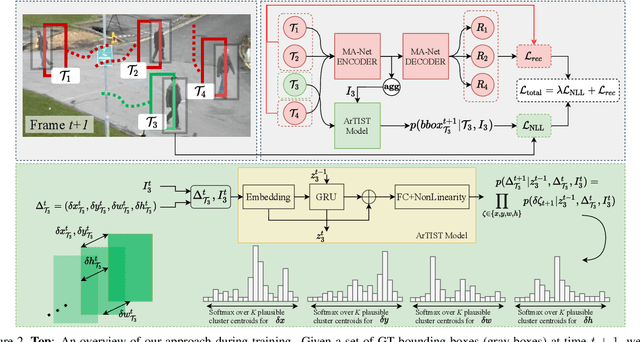
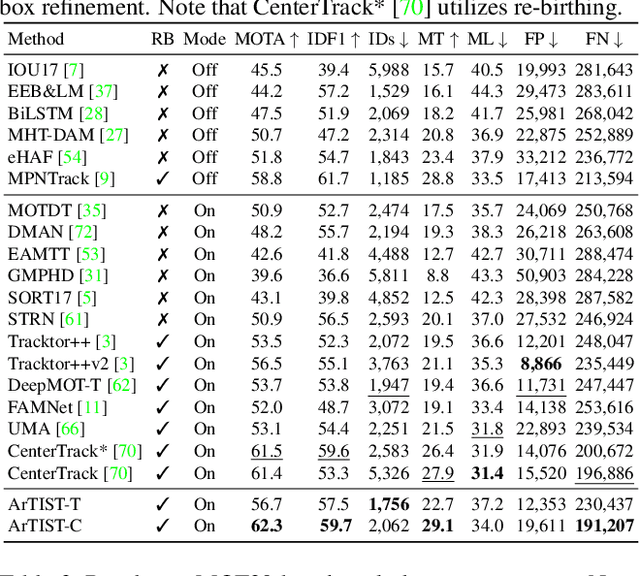
Despite the recent advances in multiple object tracking (MOT), achieved by joint detection and tracking, dealing with long occlusions remains a challenge. This is due to the fact that such techniques tend to ignore the long-term motion information. In this paper, we introduce a probabilistic autoregressive motion model to score tracklet proposals by directly measuring their likelihood. This is achieved by training our model to learn the underlying distribution of natural tracklets. As such, our model allows us not only to assign new detections to existing tracklets, but also to inpaint a tracklet when an object has been lost for a long time, e.g., due to occlusion, by sampling tracklets so as to fill the gap caused by misdetections. Our experiments demonstrate the superiority of our approach at tracking objects in challenging sequences; it outperforms the state of the art in most standard MOT metrics on multiple MOT benchmark datasets, including MOT16, MOT17, and MOT20.
Self-supervised Human Detection and Segmentation via Multi-view Consensus
Dec 09, 2020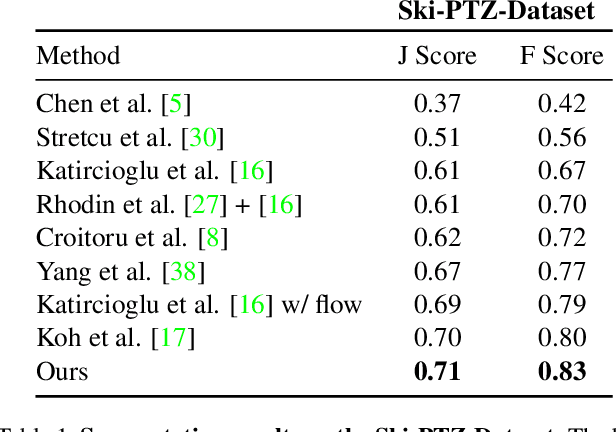
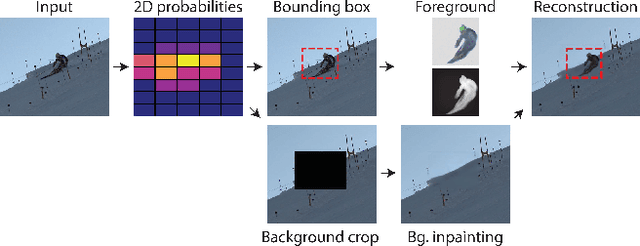
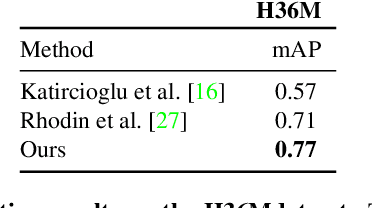
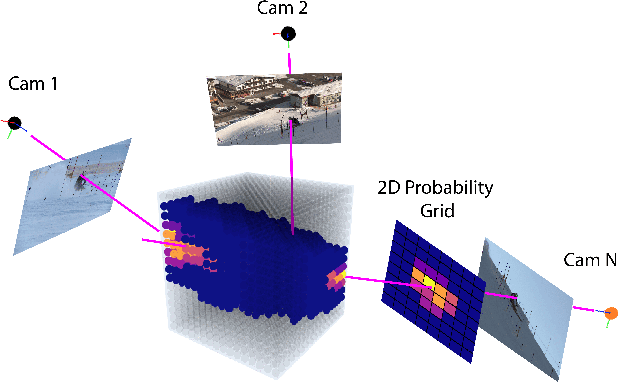
Self-supervised detection and segmentation of foreground objects in complex scenes is gaining attention as their fully-supervised counterparts require overly large amounts of annotated data to deliver sufficient accuracy in domain-specific applications. However, existing self-supervised approaches predominantly rely on restrictive assumptions on appearance and motion, which precludes their use in scenes depicting highly dynamic activities or involve camera motion. To mitigate this problem, we propose using a multi-camera framework in which geometric constraints are embedded in the form of multi-view consistency during training via coarse 3D localization in a voxel grid and fine-grained offset regression. In this manner, we learn a joint distribution of proposals over multiple views. At inference time, our method operates on single RGB images. We show that our approach outperforms state-of-the-art self-supervised person detection and segmentation techniques on images that visually depart from those of standard benchmarks, as well as on those of the classical Human3.6M dataset.
Long Term Motion Prediction Using Keyposes
Dec 08, 2020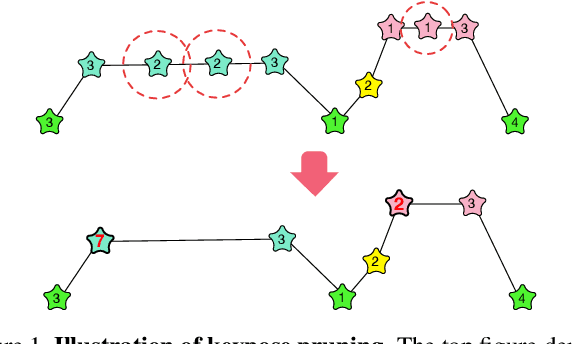
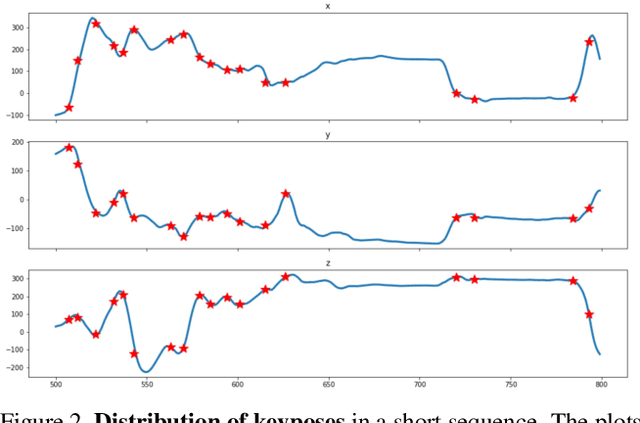
Long term human motion prediction is an essential component in safety-critical applications, such as human-robot interaction and autonomous driving. We argue that, to achieve long term forecasting, predicting human pose at every time instant is unnecessary because human motion follows patterns that are well-represented by a few essential poses in the sequence. We call such poses "keyposes", and approximate complex motions by linearly interpolating between subsequent keyposes. We show that learning the sequence of such keyposes allows us to predict very long term motion, up to 5 seconds in the future. In particular, our predictions are much more realistic and better preserve the motion dynamics than those obtained by the state-of-the-art methods. Furthermore, our approach models the future keyposes probabilistically, which, during inference, lets us generate diverse future motions via sampling.
Unsupervised Learning on Monocular Videos for 3D Human Pose Estimation
Dec 02, 2020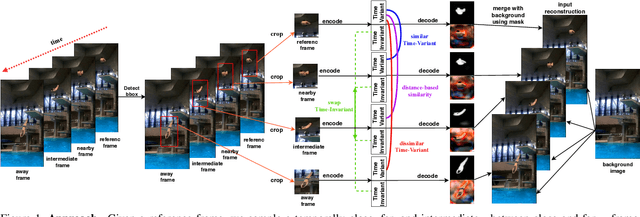
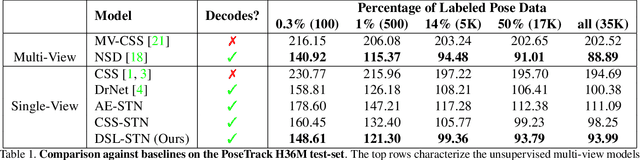
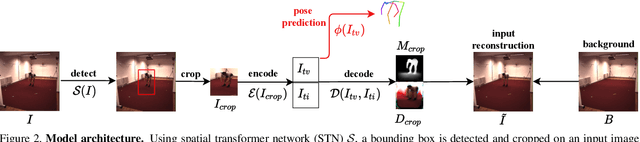
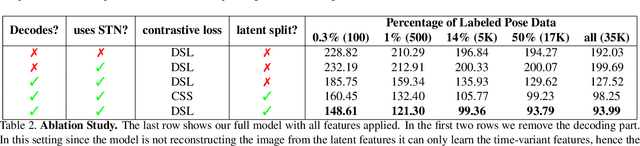
In this paper, we introduce an unsupervised feature extraction method that exploits contrastive self-supervised (CSS) learning to extract rich latent vectors from single-view videos. Instead of simply treating the latent features of nearby frames as positive pairs and those of temporally-distant ones as negative pairs as in other CSS approaches, we explicitly separate each latent vector into a time-variant component and a time-invariant one. We then show that applying CSS only to the time-variant features, while also reconstructing the input and encouraging a gradual transition between nearby and away features yields a rich latent space, well-suited for human pose estimation. Our approach outperforms other unsupervised single-view methods and match the performance of multi-view techniques.
Counting People by Estimating People Flows
Dec 01, 2020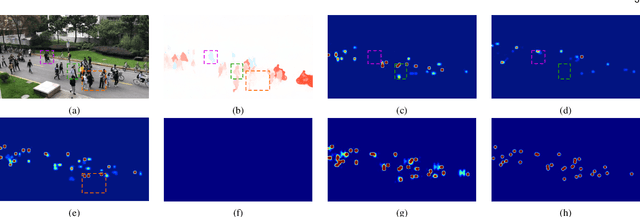
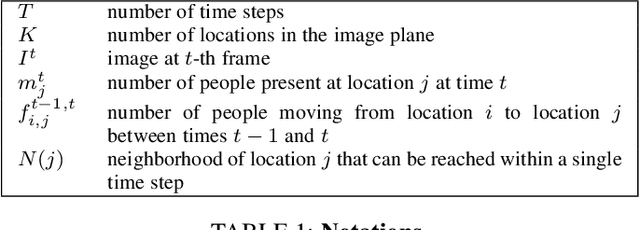
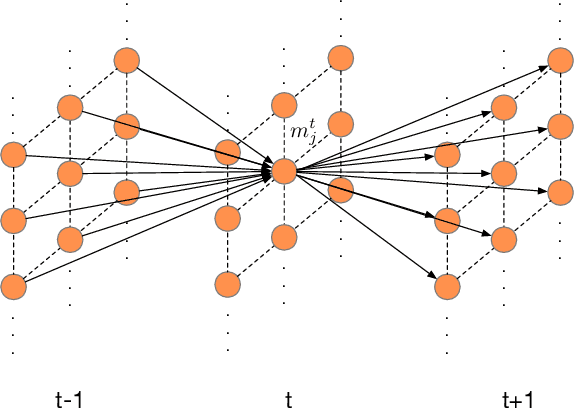
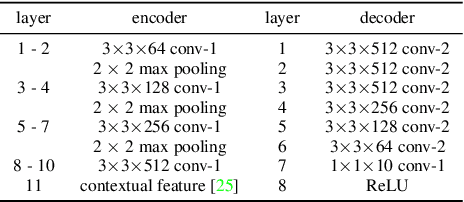
Modern methods for counting people in crowded scenes rely on deep networks to estimate people densities in individual images. As such, only very few take advantage of temporal consistency in video sequences, and those that do only impose weak smoothness constraints across consecutive frames. In this paper, we advocate estimating people flows across image locations between consecutive images and inferring the people densities from these flows instead of directly regressing them. This enables us to impose much stronger constraints encoding the conservation of the number of people. As a result, it significantly boosts performance without requiring a more complex architecture. Furthermore, it allows us to exploit the correlation between people flow and optical flow to further improve the results. We also show that leveraging people conservation constraints in both a spatial and temporal manner makes it possible to train a deep crowd counting model in an active learning setting with much fewer annotations. This significantly reduces the annotation cost while still leading to similar performance to the full supervision case.
PCLs: Geometry-aware Neural Reconstruction of 3D Pose with Perspective Crop Layers
Nov 27, 2020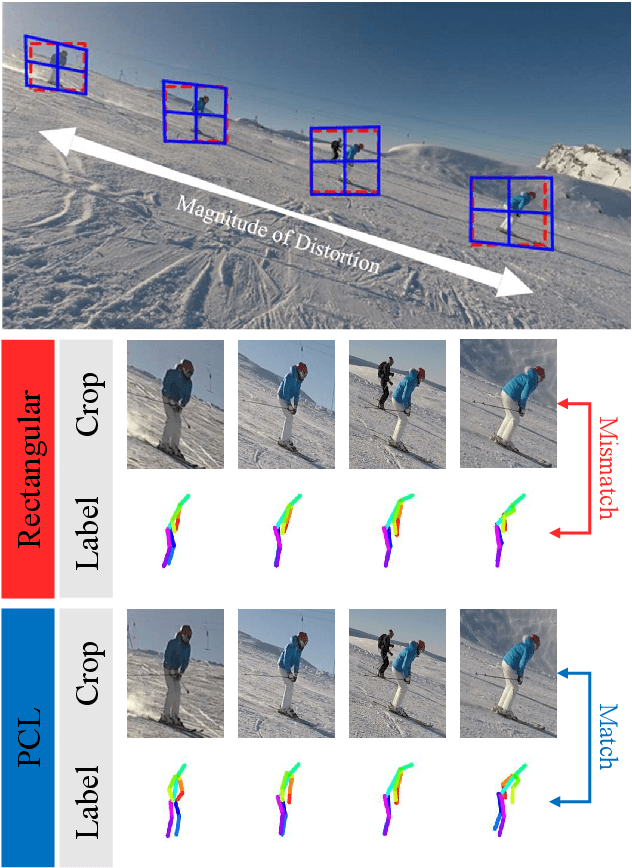
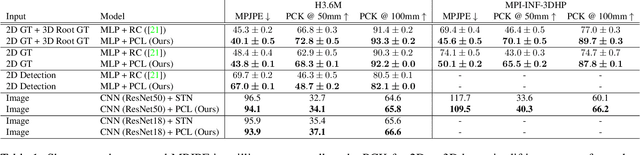
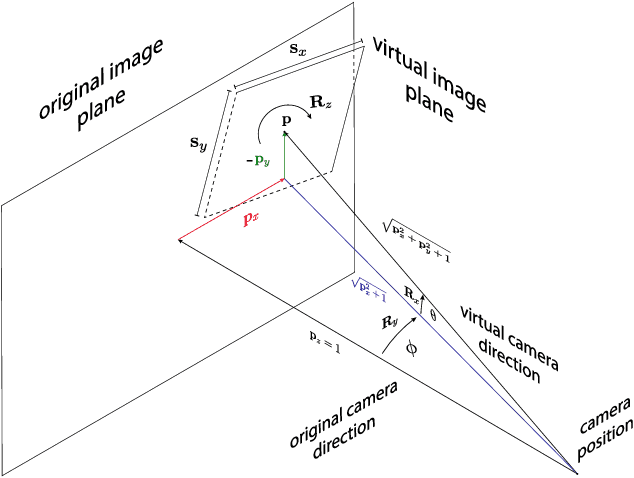
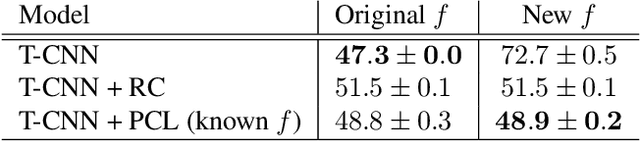
Local processing is an essential feature of CNNs and other neural network architectures - it is one of the reasons why they work so well on images where relevant information is, to a large extent, local. However, perspective effects stemming from the projection in a conventional camera vary for different global positions in the image. We introduce Perspective Crop Layers (PCLs) - a form of perspective crop of the region of interest based on the camera geometry - and show that accounting for the perspective consistently improves the accuracy of state-of-the-art 3D pose reconstruction methods. PCLs are modular neural network layers, which, when inserted into existing CNN and MLP architectures, deterministically remove the location-dependent perspective effects while leaving end-to-end training and the number of parameters of the underlying neural network unchanged. We demonstrate that PCL leads to improved 3D human pose reconstruction accuracy for CNN architectures that use cropping operations, such as spatial transformer networks (STN), and, somewhat surprisingly, MLPs used for 2D-to-3D keypoint lifting. Our conclusion is that it is important to utilize camera calibration information when available, for classical and deep-learning-based computer vision alike. PCL offers an easy way to improve the accuracy of existing 3D reconstruction networks by making them geometry-aware.
A Closed-Form Solution to Local Non-Rigid Structure-from-Motion
Nov 23, 2020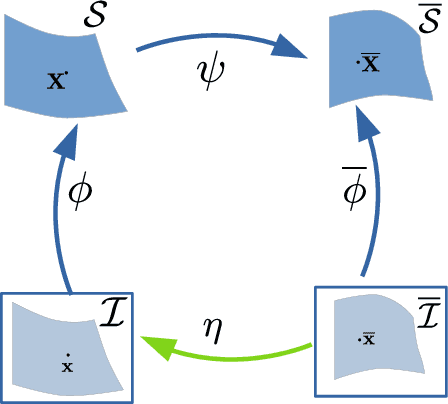
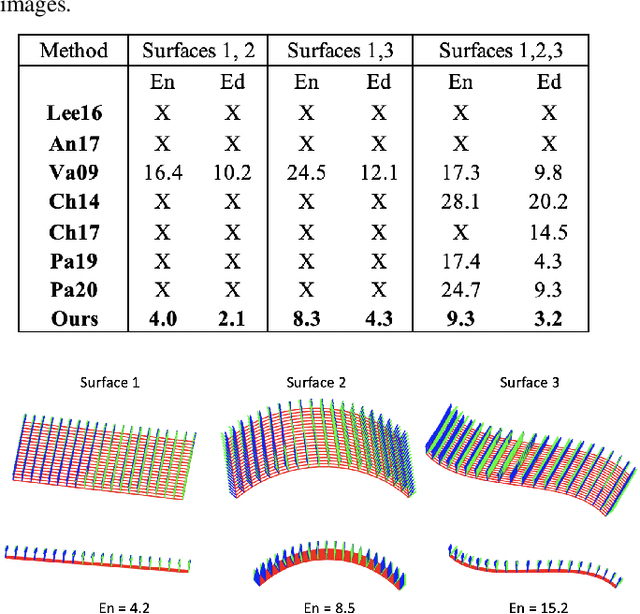
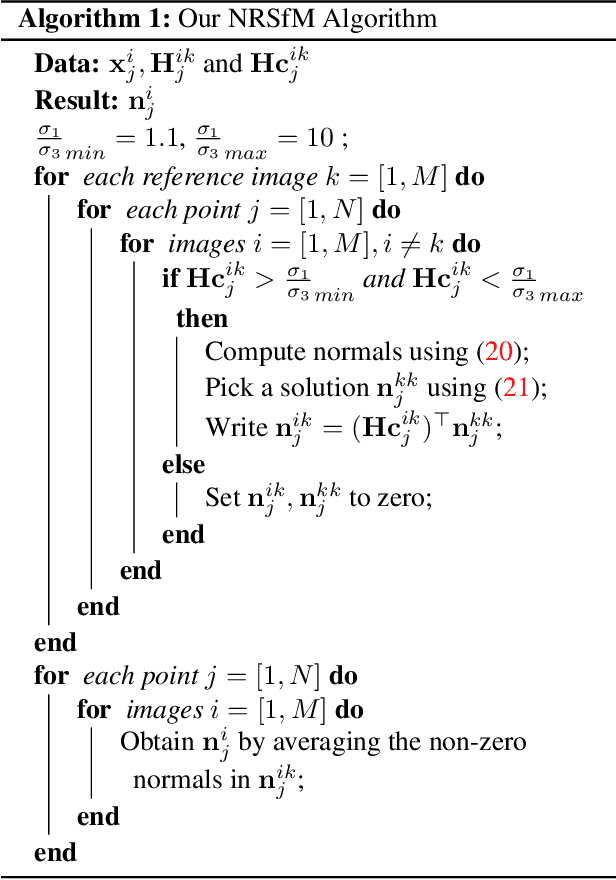
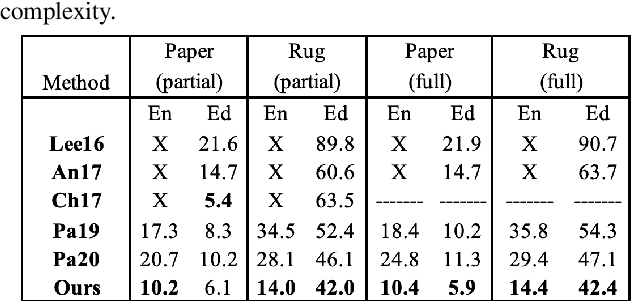
A recent trend in Non-Rigid Structure-from-Motion (NRSfM) is to express local, differential constraints between pairs of images, from which the surface normal at any point can be obtained by solving a system of polynomial equations. The systems of equations derived in previous work, however, are of high degree, having up to five real solutions, thus requiring a computationally expensive strategy to select a unique solution. Furthermore, they suffer from degeneracies that make the resulting estimates unreliable, without any mechanism to identify this situation. In this paper, we show that, under widely applicable assumptions, we can derive a new system of equation in terms of the surface normals whose two solutions can be obtained in closed-form and can easily be disambiguated locally. Our formalism further allows us to assess how reliable the estimated local normals are and, hence, to discard them if they are not. Our experiments show that our reconstructions, obtained from two or more views, are significantly more accurate than those of state-of-the-art methods, while also being faster.
3D Registration for Self-Occluded Objects in Context
Nov 23, 2020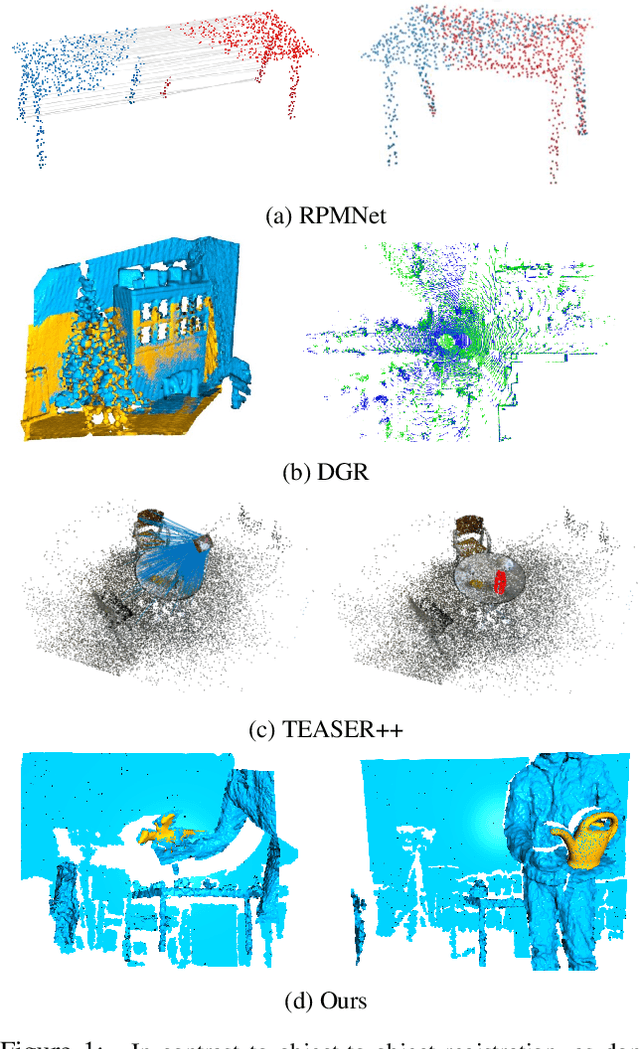
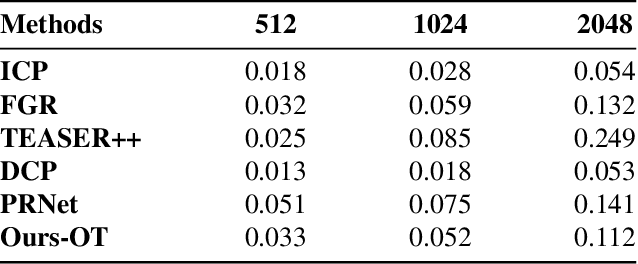
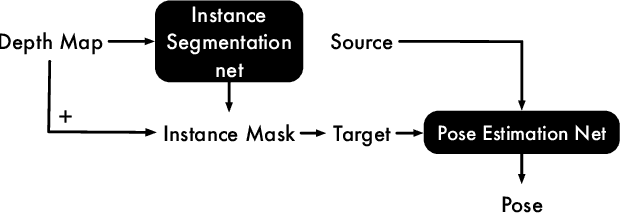
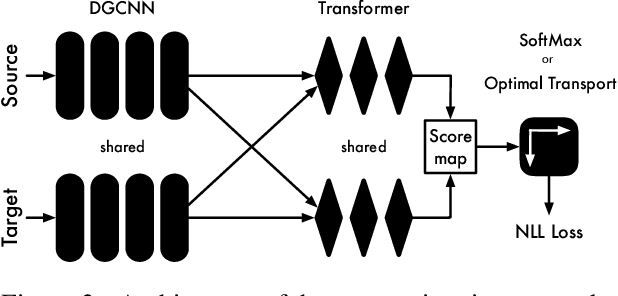
While much progress has been made on the task of 3D point cloud registration, there still exists no learning-based method able to estimate the 6D pose of an object observed by a 2.5D sensor in a scene. The challenges of this scenario include the fact that most measurements are outliers depicting the object's surrounding context, and the mismatch between the complete 3D object model and its self-occluded observations. We introduce the first deep learning framework capable of effectively handling this scenario. Our method consists of an instance segmentation module followed by a pose estimation one. It allows us to perform 3D registration in a one-shot manner, without requiring an expensive iterative procedure. We further develop an on-the-fly rendering-based training strategy that is both time- and memory-efficient. Our experiments evidence the superiority of our approach over the state-of-the-art traditional and learning-based 3D registration methods.