 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNash Learning from Human Feedback
Dec 06, 2023



Reinforcement learning from human feedback (RLHF) has emerged as the main paradigm for aligning large language models (LLMs) with human preferences. Typically, RLHF involves the initial step of learning a reward model from human feedback, often expressed as preferences between pairs of text generations produced by a pre-trained LLM. Subsequently, the LLM's policy is fine-tuned by optimizing it to maximize the reward model through a reinforcement learning algorithm. However, an inherent limitation of current reward models is their inability to fully represent the richness of human preferences and their dependency on the sampling distribution. In this study, we introduce an alternative pipeline for the fine-tuning of LLMs using pairwise human feedback. Our approach entails the initial learning of a preference model, which is conditioned on two inputs given a prompt, followed by the pursuit of a policy that consistently generates responses preferred over those generated by any competing policy, thus defining the Nash equilibrium of this preference model. We term this approach Nash learning from human feedback (NLHF). In the context of a tabular policy representation, we present a novel algorithmic solution, Nash-MD, founded on the principles of mirror descent. This algorithm produces a sequence of policies, with the last iteration converging to the regularized Nash equilibrium. Additionally, we explore parametric representations of policies and introduce gradient descent algorithms for deep-learning architectures. To demonstrate the effectiveness of our approach, we present experimental results involving the fine-tuning of a LLM for a text summarization task. We believe NLHF offers a compelling avenue for preference learning and policy optimization with the potential of advancing the field of aligning LLMs with human preferences.
A General Theoretical Paradigm to Understand Learning from Human Preferences
Oct 18, 2023

The prevalent deployment of learning from human preferences through reinforcement learning (RLHF) relies on two important approximations: the first assumes that pairwise preferences can be substituted with pointwise rewards. The second assumes that a reward model trained on these pointwise rewards can generalize from collected data to out-of-distribution data sampled by the policy. Recently, Direct Preference Optimisation (DPO) has been proposed as an approach that bypasses the second approximation and learn directly a policy from collected data without the reward modelling stage. However, this method still heavily relies on the first approximation. In this paper we try to gain a deeper theoretical understanding of these practical algorithms. In particular we derive a new general objective called $\Psi$PO for learning from human preferences that is expressed in terms of pairwise preferences and therefore bypasses both approximations. This new general objective allows us to perform an in-depth analysis of the behavior of RLHF and DPO (as special cases of $\Psi$PO) and to identify their potential pitfalls. We then consider another special case for $\Psi$PO by setting $\Psi$ simply to Identity, for which we can derive an efficient optimisation procedure, prove performance guarantees and demonstrate its empirical superiority to DPO on some illustrative examples.
Bootstrapped Representations in Reinforcement Learning
Jun 16, 2023In reinforcement learning (RL), state representations are key to dealing with large or continuous state spaces. While one of the promises of deep learning algorithms is to automatically construct features well-tuned for the task they try to solve, such a representation might not emerge from end-to-end training of deep RL agents. To mitigate this issue, auxiliary objectives are often incorporated into the learning process and help shape the learnt state representation. Bootstrapping methods are today's method of choice to make these additional predictions. Yet, it is unclear which features these algorithms capture and how they relate to those from other auxiliary-task-based approaches. In this paper, we address this gap and provide a theoretical characterization of the state representation learnt by temporal difference learning (Sutton, 1988). Surprisingly, we find that this representation differs from the features learned by Monte Carlo and residual gradient algorithms for most transition structures of the environment in the policy evaluation setting. We describe the efficacy of these representations for policy evaluation, and use our theoretical analysis to design new auxiliary learning rules. We complement our theoretical results with an empirical comparison of these learning rules for different cumulant functions on classic domains such as the four-room domain (Sutton et al, 1999) and Mountain Car (Moore, 1990).
DoMo-AC: Doubly Multi-step Off-policy Actor-Critic Algorithm
May 29, 2023



Multi-step learning applies lookahead over multiple time steps and has proved valuable in policy evaluation settings. However, in the optimal control case, the impact of multi-step learning has been relatively limited despite a number of prior efforts. Fundamentally, this might be because multi-step policy improvements require operations that cannot be approximated by stochastic samples, hence hindering the widespread adoption of such methods in practice. To address such limitations, we introduce doubly multi-step off-policy VI (DoMo-VI), a novel oracle algorithm that combines multi-step policy improvements and policy evaluations. DoMo-VI enjoys guaranteed convergence speed-up to the optimal policy and is applicable in general off-policy learning settings. We then propose doubly multi-step off-policy actor-critic (DoMo-AC), a practical instantiation of the DoMo-VI algorithm. DoMo-AC introduces a bias-variance trade-off that ensures improved policy gradient estimates. When combined with the IMPALA architecture, DoMo-AC has showed improvements over the baseline algorithm on Atari-57 game benchmarks.
VA-learning as a more efficient alternative to Q-learning
May 29, 2023In reinforcement learning, the advantage function is critical for policy improvement, but is often extracted from a learned Q-function. A natural question is: Why not learn the advantage function directly? In this work, we introduce VA-learning, which directly learns advantage function and value function using bootstrapping, without explicit reference to Q-functions. VA-learning learns off-policy and enjoys similar theoretical guarantees as Q-learning. Thanks to the direct learning of advantage function and value function, VA-learning improves the sample efficiency over Q-learning both in tabular implementations and deep RL agents on Atari-57 games. We also identify a close connection between VA-learning and the dueling architecture, which partially explains why a simple architectural change to DQN agents tends to improve performance.
The Statistical Benefits of Quantile Temporal-Difference Learning for Value Estimation
May 28, 2023



We study the problem of temporal-difference-based policy evaluation in reinforcement learning. In particular, we analyse the use of a distributional reinforcement learning algorithm, quantile temporal-difference learning (QTD), for this task. We reach the surprising conclusion that even if a practitioner has no interest in the return distribution beyond the mean, QTD (which learns predictions about the full distribution of returns) may offer performance superior to approaches such as classical TD learning, which predict only the mean return, even in the tabular setting.
An Analysis of Quantile Temporal-Difference Learning
Jan 11, 2023



We analyse quantile temporal-difference learning (QTD), a distributional reinforcement learning algorithm that has proven to be a key component in several successful large-scale applications of reinforcement learning. Despite these empirical successes, a theoretical understanding of QTD has proven elusive until now. Unlike classical TD learning, which can be analysed with standard stochastic approximation tools, QTD updates do not approximate contraction mappings, are highly non-linear, and may have multiple fixed points. The core result of this paper is a proof of convergence to the fixed points of a related family of dynamic programming procedures with probability 1, putting QTD on firm theoretical footing. The proof establishes connections between QTD and non-linear differential inclusions through stochastic approximation theory and non-smooth analysis.
A Novel Stochastic Gradient Descent Algorithm for Learning Principal Subspaces
Dec 08, 2022Many machine learning problems encode their data as a matrix with a possibly very large number of rows and columns. In several applications like neuroscience, image compression or deep reinforcement learning, the principal subspace of such a matrix provides a useful, low-dimensional representation of individual data. Here, we are interested in determining the $d$-dimensional principal subspace of a given matrix from sample entries, i.e. from small random submatrices. Although a number of sample-based methods exist for this problem (e.g. Oja's rule \citep{oja1982simplified}), these assume access to full columns of the matrix or particular matrix structure such as symmetry and cannot be combined as-is with neural networks \citep{baldi1989neural}. In this paper, we derive an algorithm that learns a principal subspace from sample entries, can be applied when the approximate subspace is represented by a neural network, and hence can be scaled to datasets with an effectively infinite number of rows and columns. Our method consists in defining a loss function whose minimizer is the desired principal subspace, and constructing a gradient estimate of this loss whose bias can be controlled. We complement our theoretical analysis with a series of experiments on synthetic matrices, the MNIST dataset \citep{lecun2010mnist} and the reinforcement learning domain PuddleWorld \citep{sutton1995generalization} demonstrating the usefulness of our approach.
Understanding Self-Predictive Learning for Reinforcement Learning
Dec 06, 2022



We study the learning dynamics of self-predictive learning for reinforcement learning, a family of algorithms that learn representations by minimizing the prediction error of their own future latent representations. Despite its recent empirical success, such algorithms have an apparent defect: trivial representations (such as constants) minimize the prediction error, yet it is obviously undesirable to converge to such solutions. Our central insight is that careful designs of the optimization dynamics are critical to learning meaningful representations. We identify that a faster paced optimization of the predictor and semi-gradient updates on the representation, are crucial to preventing the representation collapse. Then in an idealized setup, we show self-predictive learning dynamics carries out spectral decomposition on the state transition matrix, effectively capturing information of the transition dynamics. Building on the theoretical insights, we propose bidirectional self-predictive learning, a novel self-predictive algorithm that learns two representations simultaneously. We examine the robustness of our theoretical insights with a number of small-scale experiments and showcase the promise of the novel representation learning algorithm with large-scale experiments.
Optimistic Posterior Sampling for Reinforcement Learning with Few Samples and Tight Guarantees
Sep 28, 2022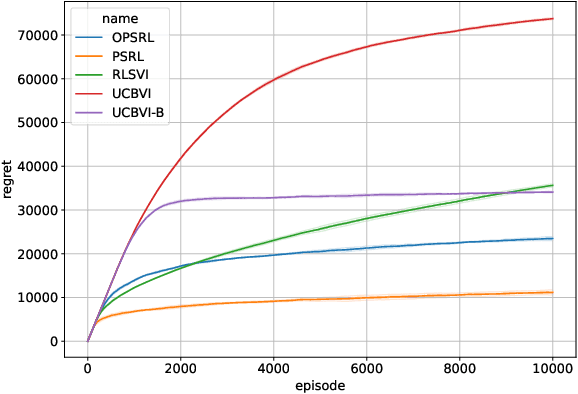
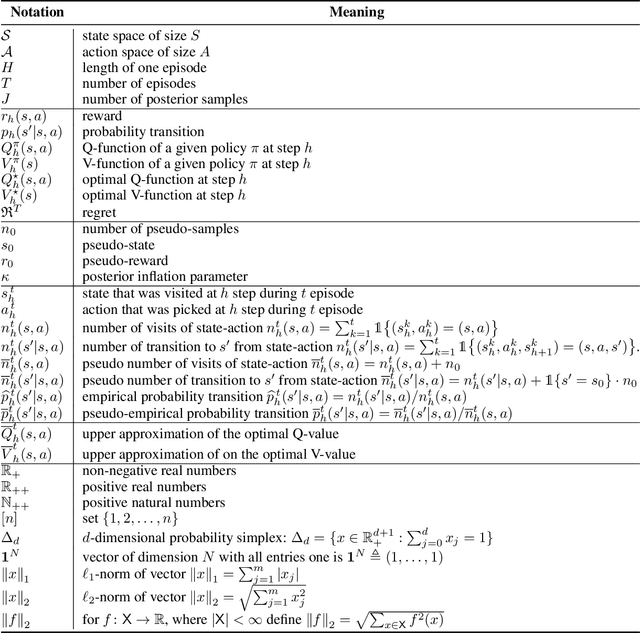
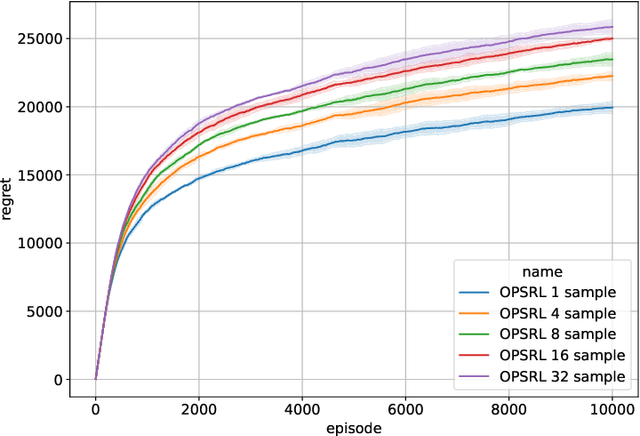
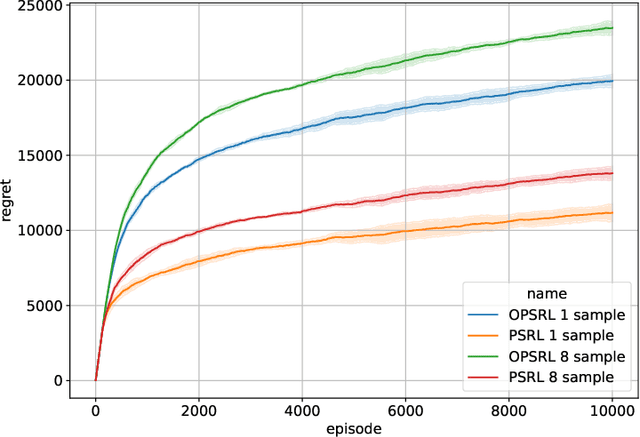
We consider reinforcement learning in an environment modeled by an episodic, finite, stage-dependent Markov decision process of horizon $H$ with $S$ states, and $A$ actions. The performance of an agent is measured by the regret after interacting with the environment for $T$ episodes. We propose an optimistic posterior sampling algorithm for reinforcement learning (OPSRL), a simple variant of posterior sampling that only needs a number of posterior samples logarithmic in $H$, $S$, $A$, and $T$ per state-action pair. For OPSRL we guarantee a high-probability regret bound of order at most $\widetilde{\mathcal{O}}(\sqrt{H^3SAT})$ ignoring $\text{poly}\log(HSAT)$ terms. The key novel technical ingredient is a new sharp anti-concentration inequality for linear forms which may be of independent interest. Specifically, we extend the normal approximation-based lower bound for Beta distributions by Alfers and Dinges [1984] to Dirichlet distributions. Our bound matches the lower bound of order $\Omega(\sqrt{H^3SAT})$, thereby answering the open problems raised by Agrawal and Jia [2017b] for the episodic setting.