 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Causal Discovery from Robot Sensor Data in Dynamic Scenarios
Feb 20, 2023Identifying the main features and learning the causal relationships of a dynamic system from time-series of sensor data are key problems in many real-world robot applications. In this paper, we propose an extension of a state-of-the-art causal discovery method, PCMCI, embedding an additional feature-selection module based on transfer entropy. Starting from a prefixed set of variables, the new algorithm reconstructs the causal model of the observed system by considering only its main features and neglecting those deemed unnecessary for understanding the evolution of the system. We first validate the method on a toy problem and on synthetic data of brain network, for which the ground-truth models are available, and then on a real-world robotics scenario using a large-scale time-series dataset of human trajectories. The experiments demonstrate that our solution outperforms the previous state-of-the-art technique in terms of accuracy and computational efficiency, allowing better and faster causal discovery of meaningful models from robot sensor data.
End-to-end Unsupervised Learning of Long-Term 3D Stable objects
Jan 26, 2023



3D point cloud semantic classification is an important task in robotics as it enables a better understanding of the mapped environment. This work proposes to learn the long-term stability of the 3D objects using a neural network based on PointNet++, where the long-term stable object refers to a static object that cannot move on its own (e.g. tree, pole, building). The training data is generated in an unsupervised manner by assigning a continuous label to individual points by exploiting multiple time slices of the same environment. Instead of using discrete labels, i.e. static/dynamic, we propose to use a continuous label value indicating point temporal stability to train a regression PointNet++ network. We evaluated our approach on point cloud data of two parking lots from the NCLT dataset. The experiments' performance reveals that static vs dynamic object classification is best performed by training a regression model, followed by thresholding, compared to directly training a classification model.
Collection and Evaluation of a Long-Term 4D Agri-Robotic Dataset
Nov 25, 2022



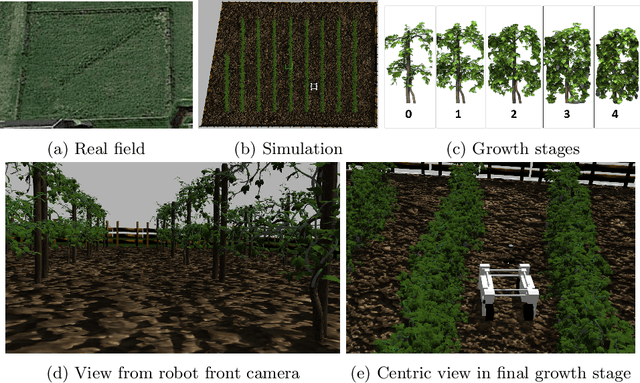
Long-term autonomy is one of the most demanded capabilities looked into a robot. The possibility to perform the same task over and over on a long temporal horizon, offering a high standard of reproducibility and robustness, is appealing. Long-term autonomy can play a crucial role in the adoption of robotics systems for precision agriculture, for example in assisting humans in monitoring and harvesting crops in a large orchard. With this scope in mind, we report an ongoing effort in the long-term deployment of an autonomous mobile robot in a vineyard for data collection across multiple months. The main aim is to collect data from the same area at different points in time so to be able to analyse the impact of the environmental changes in the mapping and localisation tasks. In this work, we present a map-based localisation study taking 4 data sessions. We identify expected failures when the pre-built map visually differs from the environment's current appearance and we anticipate LTS-Net, a solution pointed at extracting stable temporal features for improving long-term 4D localisation results.
Premonition Net, A Multi-Timeline Transformer Network Architecture Towards Strawberry Tabletop Yield Forecasting
Nov 15, 2022



Yield forecasting is a critical first step necessary for yield optimisation, with important consequences for the broader food supply chain, procurement, price-negotiation, logistics, and supply. However yield forecasting is notoriously difficult, and oft-inaccurate. Premonition Net is a multi-timeline, time sequence ingesting approach towards processing the past, the present, and premonitions of the future. We show how this structure combined with transformers attains critical yield forecasting proficiency towards improving food security, lowering prices, and reducing waste. We find data availability to be a continued difficulty however using our premonition network and our own collected data we attain yield forecasts 3 weeks ahead with a a testing set RMSE loss of ~0.08 across our latest season.
Causal Discovery of Dynamic Models for Predicting Human Spatial Interactions
Oct 29, 2022



Exploiting robots for activities in human-shared environments, whether warehouses, shopping centres or hospitals, calls for such robots to understand the underlying physical interactions between nearby agents and objects. In particular, modelling cause-and-effect relations between the latter can help to predict unobserved human behaviours and anticipate the outcome of specific robot interventions. In this paper, we propose an application of causal discovery methods to model human-robot spatial interactions, trying to understand human behaviours from real-world sensor data in two possible scenarios: humans interacting with the environment, and humans interacting with obstacles. New methods and practical solutions are discussed to exploit, for the first time, a state-of-the-art causal discovery algorithm in some challenging human environments, with potential application in many service robotics scenarios. To demonstrate the utility of the causal models obtained from real-world datasets, we present a comparison between causal and non-causal prediction approaches. Our results show that the causal model correctly captures the underlying interactions of the considered scenarios and improves its prediction accuracy.
Environment-aware Interactive Movement Primitives for Object Reaching in Clutter
Oct 28, 2022



The majority of motion planning strategies developed over the literature for reaching an object in clutter are applied to two dimensional (2-d) space where the state space of the environment is constrained in one direction. Fewer works have been investigated to reach a target in 3-d cluttered space, and when so, they have limited performance when applied to complex cases. In this work, we propose a constrained multi-objective optimization framework (OptI-ProMP) to approach the problem of reaching a target in a compact clutter with a case study on soft fruits grown in clusters, leveraging the local optimisation-based planner CHOMP. OptI-ProMP features costs related to both static, dynamic and pushable objects in the target neighborhood, and it relies on probabilistic primitives for problem initialisation. We tested, in a simulated poly-tunnel, both ProMP-based planners from literature and the OptI-ProMP, on low (3-dofs) and high (7-dofs) dexterity robot body, respectively. Results show collision and pushing costs minimisation with 7-dofs robot kinematics, in addition to successful static obstacles avoidance and systematic drifting from the pushable objects center of mass.
Learning on the Job: Long-Term Behavioural Adaptation in Human-Robot Interactions
Mar 20, 2022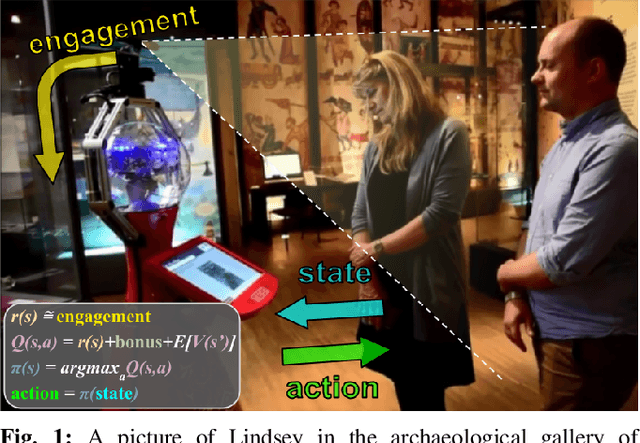
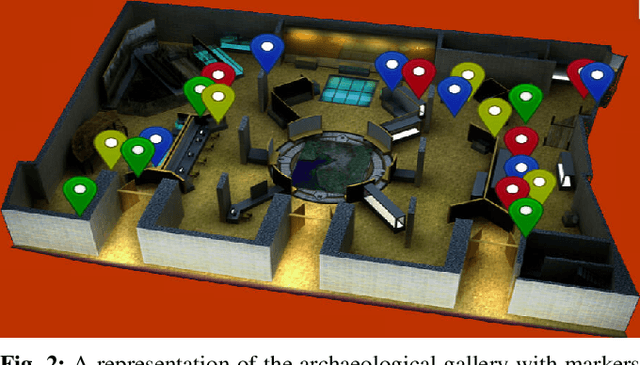
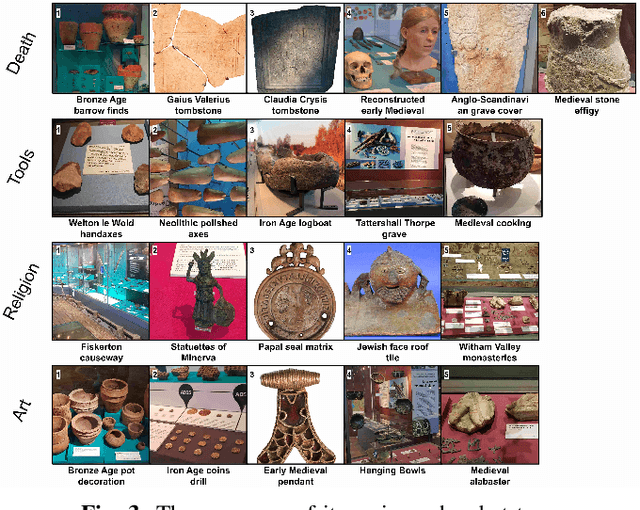
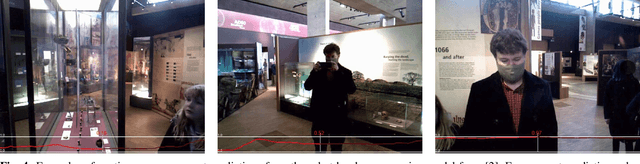
In this work, we propose a framework for allowing autonomous robots deployed for extended periods of time in public spaces to adapt their own behaviour online from user interactions. The robot behaviour planning is embedded in a Reinforcement Learning (RL) framework, where the objective is maximising the level of overall user engagement during the interactions. We use the Upper-Confidence-Bound Value-Iteration (UCBVI) algorithm, which gives a helpful way of managing the exploration-exploitation trade-off for real-time interactions. An engagement model trained end-to-end generates the reward function in real-time during policy execution. We test this approach in a public museum in Lincoln (UK), where the robot is deployed as a tour guide for the visitors. Results show that after a couple of months of exploration, the robot policy learned to maintain the engagement of users for longer, with an increase of 22.8% over the initial static policy in the number of items visited during the tour and a 30% increase in the probability of completing the tour. This work is a promising step toward behavioural adaptation in long-term scenarios for robotics applications in social settings.
EDLaaS; Fully Homomorphic Encryption Over Neural Network Graphs
Oct 26, 2021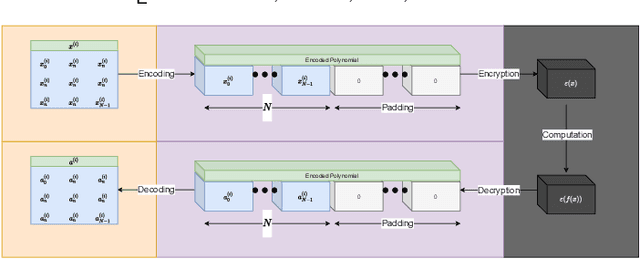

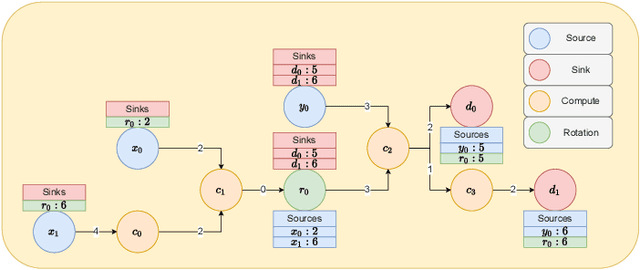

We present automatically parameterised Fully Homomorphic Encryption (FHE), for encrypted neural network inference. We present and exemplify our inference over FHE compatible neural networks with our own open-source framework and reproducible step-by-step examples. We use the 4th generation Cheon, Kim, Kim and Song (CKKS) FHE scheme over fixed points provided by the Microsoft Simple Encrypted Arithmetic Library (MS-SEAL). We significantly enhance the usability and applicability of FHE in deep learning contexts, with a focus on the constituent graphs, traversal, and optimisation. We find that FHE is not a panacea for all privacy preserving machine learning (PPML) problems, and that certain limitations still remain, such as model training. However we also find that in certain contexts FHE is well suited for computing completely private predictions with neural networks. We focus on convolutional neural networks (CNNs), fashion-MNIST, and levelled FHE operations. The ability to privately compute sensitive problems more easily, while lowering the barriers to entry, can allow otherwise too-sensitive fields to begin advantaging themselves of performant third-party neural networks. Lastly we show encrypted deep learning, applied to a sensitive real world problem in agri-food, and how this can have a large positive impact on food-waste and encourage much-needed data sharing.
Benchmark of visual and 3D lidar SLAM systems in simulation environment for vineyards
Jul 12, 2021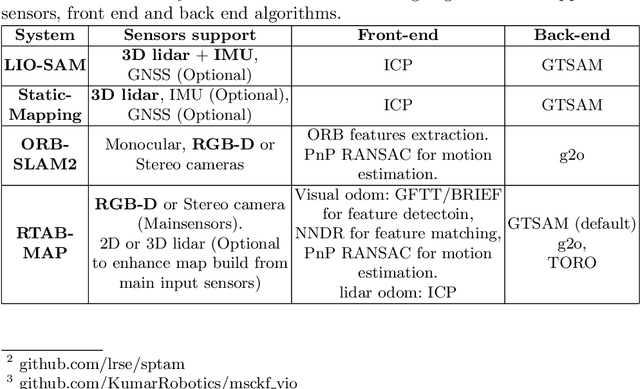
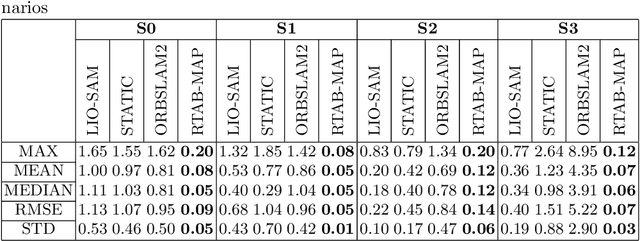
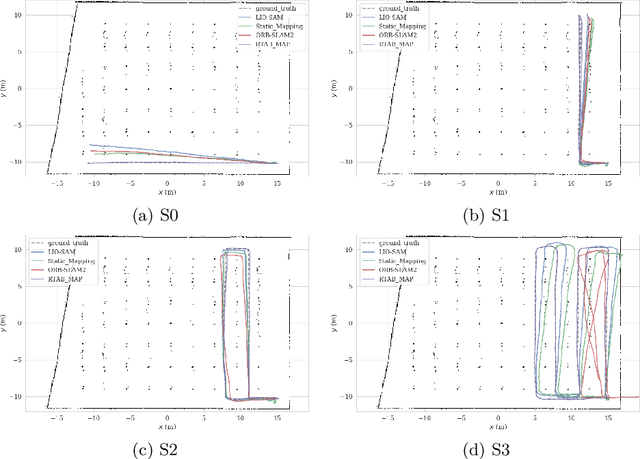
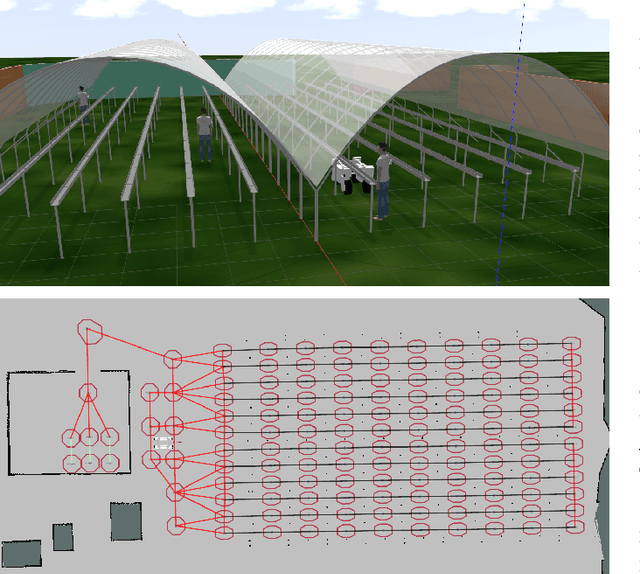
In this work, we present a comparative analysis of the trajectories estimated from various Simultaneous Localization and Mapping (SLAM) systems in a simulation environment for vineyards. Vineyard environment is challenging for SLAM methods, due to visual appearance changes over time, uneven terrain, and repeated visual patterns. For this reason, we created a simulation environment specifically for vineyards to help studying SLAM systems in such a challenging environment. We evaluated the following SLAM systems: LIO-SAM, StaticMapping, ORB-SLAM2, and RTAB-MAP in four different scenarios. The mobile robot used in this study equipped with 2D and 3D lidars, IMU, and RGB-D camera (Kinect v2). The results show good and encouraging performance of RTAB-MAP in such an environment.
Navigate-and-Seek: a Robotics Framework for People Localization in Agricultural Environments
Jul 08, 2021
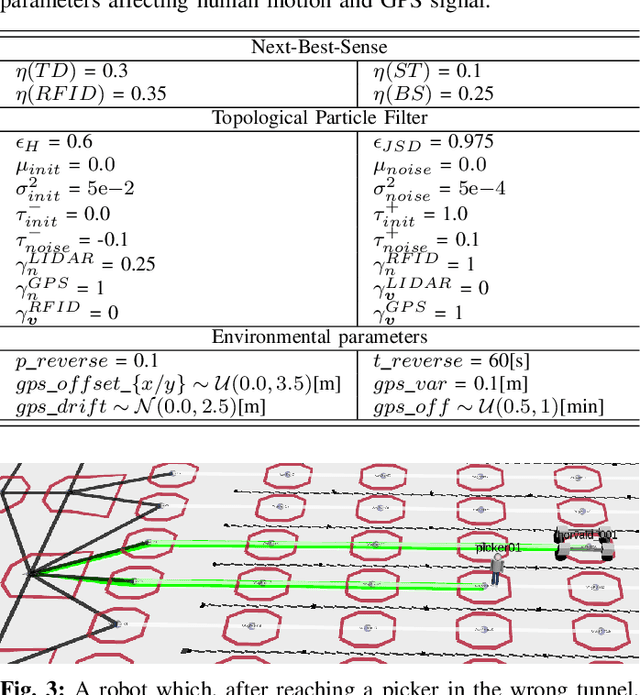
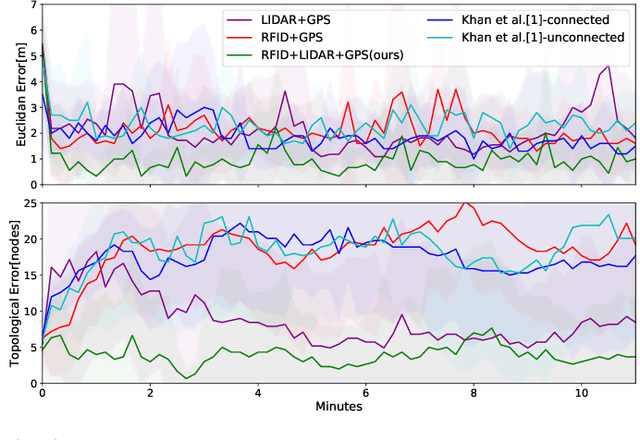
The agricultural domain offers a working environment where many human laborers are nowadays employed to maintain or harvest crops, with huge potential for productivity gains through the introduction of robotic automation. Detecting and localizing humans reliably and accurately in such an environment, however, is a prerequisite to many services offered by fleets of mobile robots collaborating with human workers. Consequently, in this paper, we expand on the concept of a topological particle filter (TPF) to accurately and individually localize and track workers in a farm environment, integrating information from heterogeneous sensors and combining local active sensing (exploiting a robot's onboard sensing employing a Next-Best-Sense planning approach) and global localization (using affordable IoT GNSS devices). We validate the proposed approach in topologies created for the deployment of robotics fleets to support fruit pickers in a real farm environment. By combining multi-sensor observations on the topological level complemented by active perception through the NBS approach, we show that we can improve the accuracy of picker localization in comparison to prior work.