 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProto-Value Networks: Scaling Representation Learning with Auxiliary Tasks
Apr 25, 2023Auxiliary tasks improve the representations learned by deep reinforcement learning agents. Analytically, their effect is reasonably well understood; in practice, however, their primary use remains in support of a main learning objective, rather than as a method for learning representations. This is perhaps surprising given that many auxiliary tasks are defined procedurally, and hence can be treated as an essentially infinite source of information about the environment. Based on this observation, we study the effectiveness of auxiliary tasks for learning rich representations, focusing on the setting where the number of tasks and the size of the agent's network are simultaneously increased. For this purpose, we derive a new family of auxiliary tasks based on the successor measure. These tasks are easy to implement and have appealing theoretical properties. Combined with a suitable off-policy learning rule, the result is a representation learning algorithm that can be understood as extending Mahadevan & Maggioni (2007)'s proto-value functions to deep reinforcement learning -- accordingly, we call the resulting object proto-value networks. Through a series of experiments on the Arcade Learning Environment, we demonstrate that proto-value networks produce rich features that may be used to obtain performance comparable to established algorithms, using only linear approximation and a small number (~4M) of interactions with the environment's reward function.
An Analysis of Quantile Temporal-Difference Learning
Jan 11, 2023



We analyse quantile temporal-difference learning (QTD), a distributional reinforcement learning algorithm that has proven to be a key component in several successful large-scale applications of reinforcement learning. Despite these empirical successes, a theoretical understanding of QTD has proven elusive until now. Unlike classical TD learning, which can be analysed with standard stochastic approximation tools, QTD updates do not approximate contraction mappings, are highly non-linear, and may have multiple fixed points. The core result of this paper is a proof of convergence to the fixed points of a related family of dynamic programming procedures with probability 1, putting QTD on firm theoretical footing. The proof establishes connections between QTD and non-linear differential inclusions through stochastic approximation theory and non-smooth analysis.
A Novel Stochastic Gradient Descent Algorithm for Learning Principal Subspaces
Dec 08, 2022Many machine learning problems encode their data as a matrix with a possibly very large number of rows and columns. In several applications like neuroscience, image compression or deep reinforcement learning, the principal subspace of such a matrix provides a useful, low-dimensional representation of individual data. Here, we are interested in determining the $d$-dimensional principal subspace of a given matrix from sample entries, i.e. from small random submatrices. Although a number of sample-based methods exist for this problem (e.g. Oja's rule \citep{oja1982simplified}), these assume access to full columns of the matrix or particular matrix structure such as symmetry and cannot be combined as-is with neural networks \citep{baldi1989neural}. In this paper, we derive an algorithm that learns a principal subspace from sample entries, can be applied when the approximate subspace is represented by a neural network, and hence can be scaled to datasets with an effectively infinite number of rows and columns. Our method consists in defining a loss function whose minimizer is the desired principal subspace, and constructing a gradient estimate of this loss whose bias can be controlled. We complement our theoretical analysis with a series of experiments on synthetic matrices, the MNIST dataset \citep{lecun2010mnist} and the reinforcement learning domain PuddleWorld \citep{sutton1995generalization} demonstrating the usefulness of our approach.
The Nature of Temporal Difference Errors in Multi-step Distributional Reinforcement Learning
Jul 15, 2022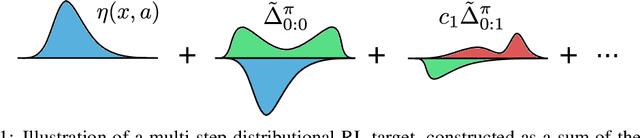
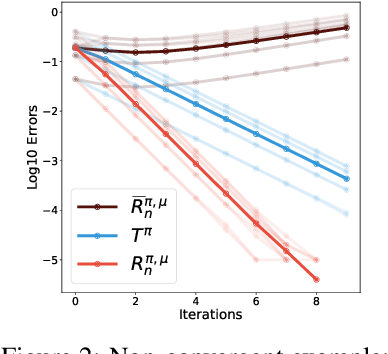
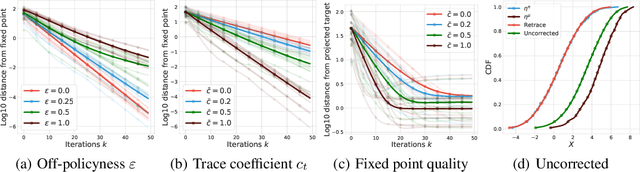
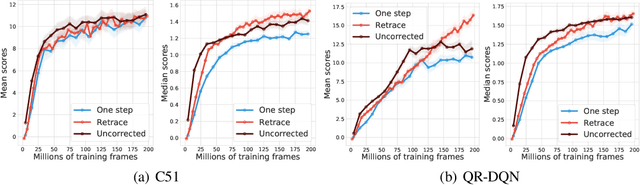
We study the multi-step off-policy learning approach to distributional RL. Despite the apparent similarity between value-based RL and distributional RL, our study reveals intriguing and fundamental differences between the two cases in the multi-step setting. We identify a novel notion of path-dependent distributional TD error, which is indispensable for principled multi-step distributional RL. The distinction from the value-based case bears important implications on concepts such as backward-view algorithms. Our work provides the first theoretical guarantees on multi-step off-policy distributional RL algorithms, including results that apply to the small number of existing approaches to multi-step distributional RL. In addition, we derive a novel algorithm, Quantile Regression-Retrace, which leads to a deep RL agent QR-DQN-Retrace that shows empirical improvements over QR-DQN on the Atari-57 benchmark. Collectively, we shed light on how unique challenges in multi-step distributional RL can be addressed both in theory and practice.
Beyond Tabula Rasa: Reincarnating Reinforcement Learning
Jun 03, 2022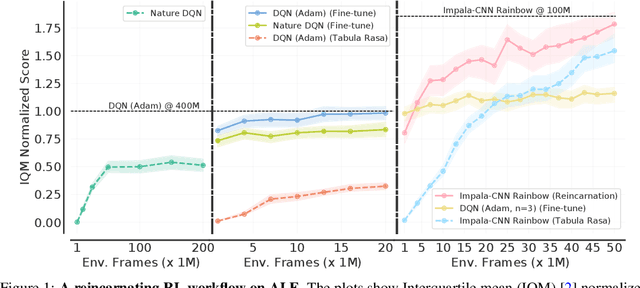
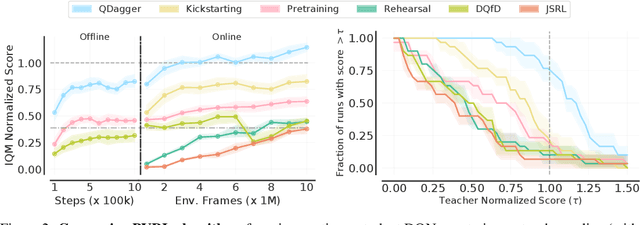
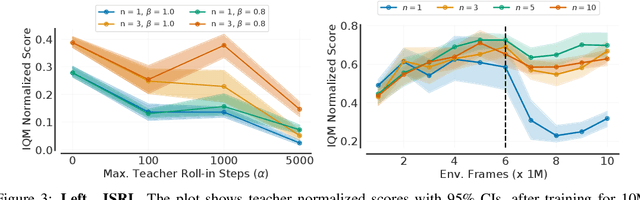
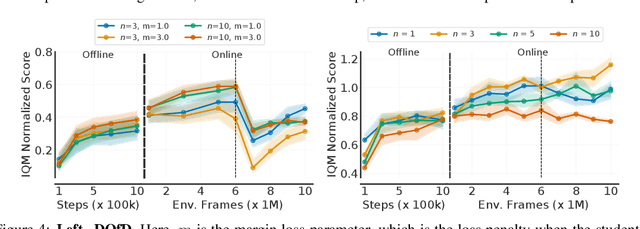
Learning tabula rasa, that is without any prior knowledge, is the prevalent workflow in reinforcement learning (RL) research. However, RL systems, when applied to large-scale settings, rarely operate tabula rasa. Such large-scale systems undergo multiple design or algorithmic changes during their development cycle and use ad hoc approaches for incorporating these changes without re-training from scratch, which would have been prohibitively expensive. Additionally, the inefficiency of deep RL typically excludes researchers without access to industrial-scale resources from tackling computationally-demanding problems. To address these issues, we present reincarnating RL as an alternative workflow, where prior computational work (e.g., learned policies) is reused or transferred between design iterations of an RL agent, or from one RL agent to another. As a step towards enabling reincarnating RL from any agent to any other agent, we focus on the specific setting of efficiently transferring an existing sub-optimal policy to a standalone value-based RL agent. We find that existing approaches fail in this setting and propose a simple algorithm to address their limitations. Equipped with this algorithm, we demonstrate reincarnating RL's gains over tabula rasa RL on Atari 2600 games, a challenging locomotion task, and the real-world problem of navigating stratospheric balloons. Overall, this work argues for an alternative approach to RL research, which we believe could significantly improve real-world RL adoption and help democratize it further.
Distributional Hamilton-Jacobi-Bellman Equations for Continuous-Time Reinforcement Learning
May 24, 2022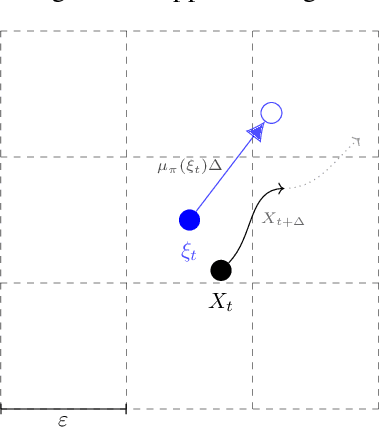
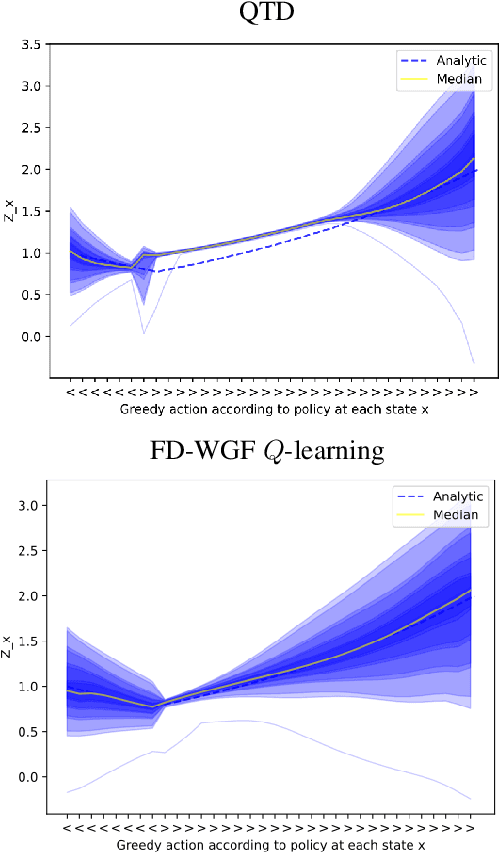
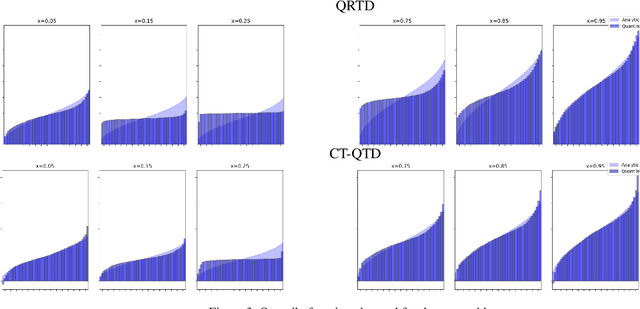
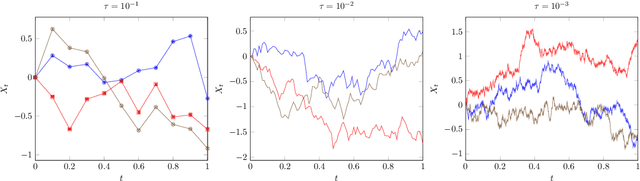
Continuous-time reinforcement learning offers an appealing formalism for describing control problems in which the passage of time is not naturally divided into discrete increments. Here we consider the problem of predicting the distribution of returns obtained by an agent interacting in a continuous-time, stochastic environment. Accurate return predictions have proven useful for determining optimal policies for risk-sensitive control, learning state representations, multiagent coordination, and more. We begin by establishing the distributional analogue of the Hamilton-Jacobi-Bellman (HJB) equation for It\^o diffusions and the broader class of Feller-Dynkin processes. We then specialize this equation to the setting in which the return distribution is approximated by $N$ uniformly-weighted particles, a common design choice in distributional algorithms. Our derivation highlights additional terms due to statistical diffusivity which arise from the proper handling of distributions in the continuous-time setting. Based on this, we propose a tractable algorithm for approximately solving the distributional HJB based on a JKO scheme, which can be implemented in an online control algorithm. We demonstrate the effectiveness of such an algorithm in a synthetic control problem.
On the Generalization of Representations in Reinforcement Learning
Mar 01, 2022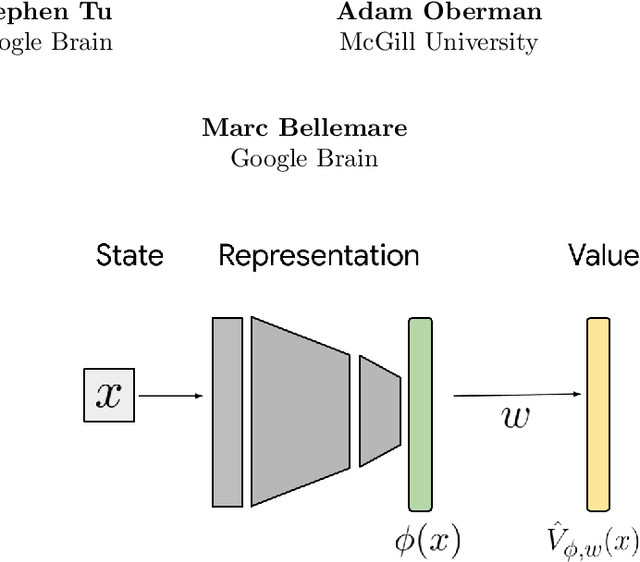
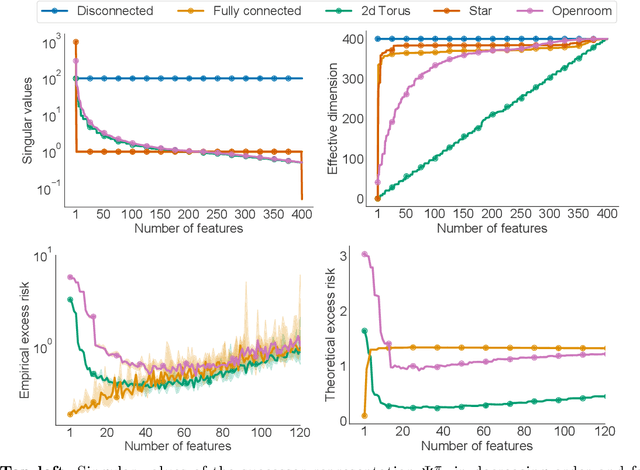
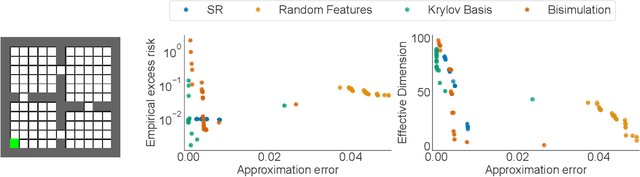
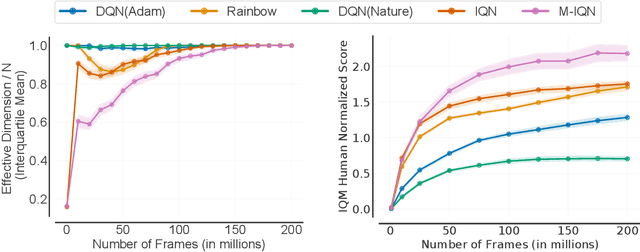
In reinforcement learning, state representations are used to tractably deal with large problem spaces. State representations serve both to approximate the value function with few parameters, but also to generalize to newly encountered states. Their features may be learned implicitly (as part of a neural network) or explicitly (for example, the successor representation of \citet{dayan1993improving}). While the approximation properties of representations are reasonably well-understood, a precise characterization of how and when these representations generalize is lacking. In this work, we address this gap and provide an informative bound on the generalization error arising from a specific state representation. This bound is based on the notion of effective dimension which measures the degree to which knowing the value at one state informs the value at other states. Our bound applies to any state representation and quantifies the natural tension between representations that generalize well and those that approximate well. We complement our theoretical results with an empirical survey of classic representation learning methods from the literature and results on the Arcade Learning Environment, and find that the generalization behaviour of learned representations is well-explained by their effective dimension.
On Bonus-Based Exploration Methods in the Arcade Learning Environment
Sep 22, 2021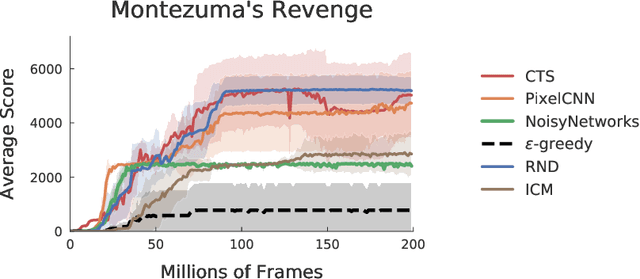
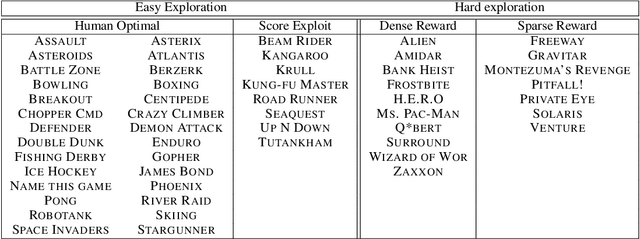
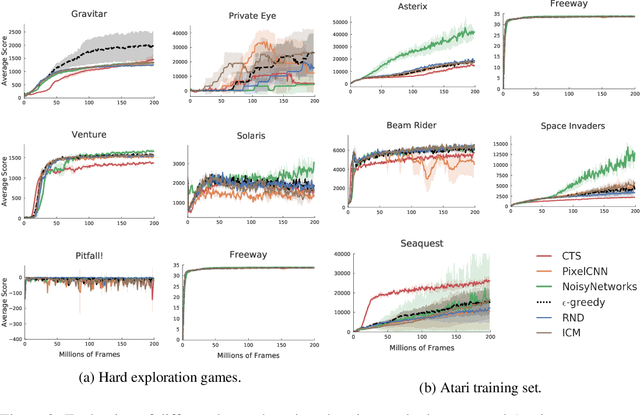
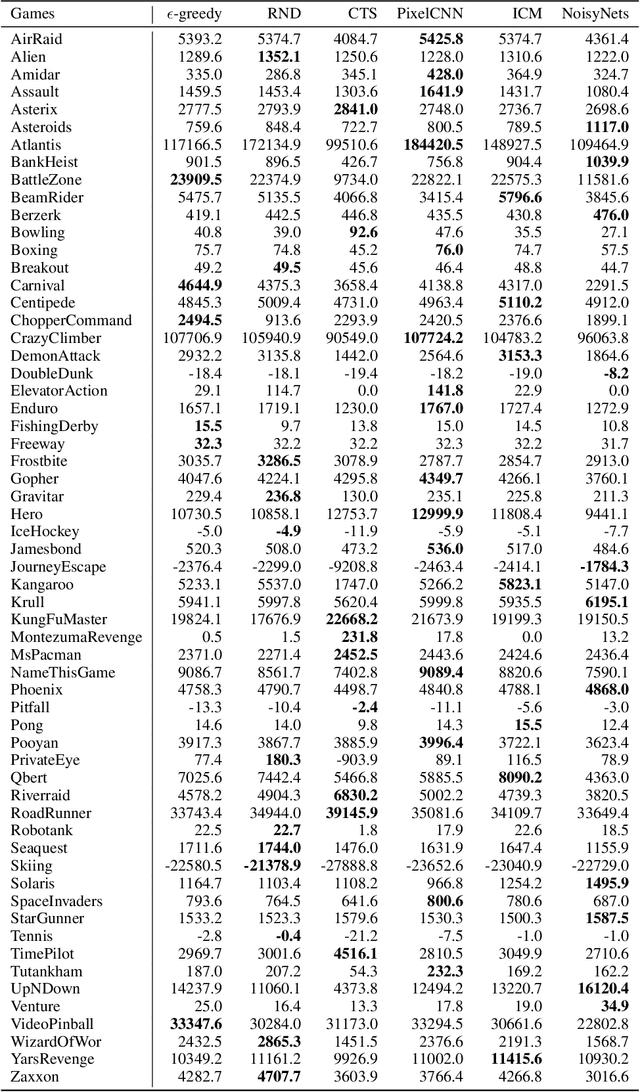
Research on exploration in reinforcement learning, as applied to Atari 2600 game-playing, has emphasized tackling difficult exploration problems such as Montezuma's Revenge (Bellemare et al., 2016). Recently, bonus-based exploration methods, which explore by augmenting the environment reward, have reached above-human average performance on such domains. In this paper we reassess popular bonus-based exploration methods within a common evaluation framework. We combine Rainbow (Hessel et al., 2018) with different exploration bonuses and evaluate its performance on Montezuma's Revenge, Bellemare et al.'s set of hard of exploration games with sparse rewards, and the whole Atari 2600 suite. We find that while exploration bonuses lead to higher score on Montezuma's Revenge they do not provide meaningful gains over the simpler $\epsilon$-greedy scheme. In fact, we find that methods that perform best on that game often underperform $\epsilon$-greedy on easy exploration Atari 2600 games. We find that our conclusions remain valid even when hyperparameters are tuned for these easy-exploration games. Finally, we find that none of the methods surveyed benefit from additional training samples (1 billion frames, versus Rainbow's 200 million) on Bellemare et al.'s hard exploration games. Our results suggest that recent gains in Montezuma's Revenge may be better attributed to architecture change, rather than better exploration schemes; and that the real pace of progress in exploration research for Atari 2600 games may have been obfuscated by good results on a single domain.
* Full version of arXiv:1908.02388
Deep Reinforcement Learning at the Edge of the Statistical Precipice
Aug 30, 2021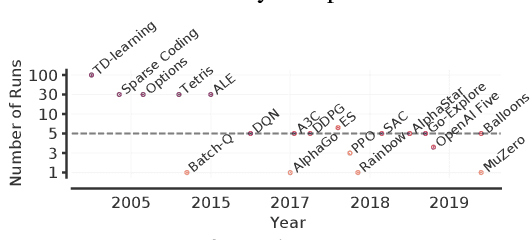
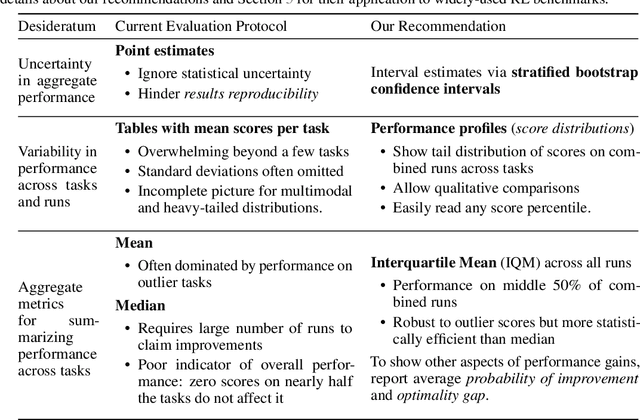
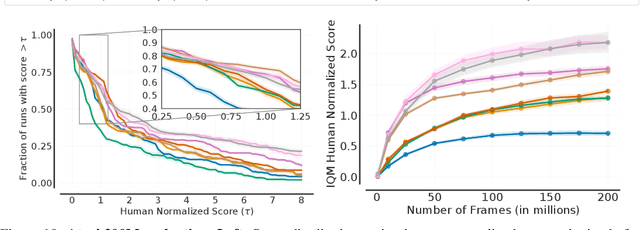
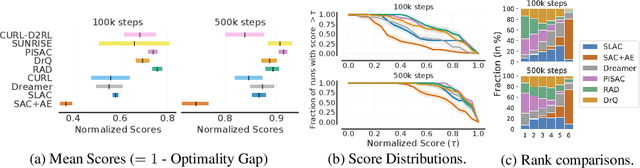
Deep reinforcement learning (RL) algorithms are predominantly evaluated by comparing their relative performance on a large suite of tasks. Most published results on deep RL benchmarks compare point estimates of aggregate performance such as mean and median scores across tasks, ignoring the statistical uncertainty implied by the use of a finite number of training runs. Beginning with the Arcade Learning Environment (ALE), the shift towards computationally-demanding benchmarks has led to the practice of evaluating only a small number of runs per task, exacerbating the statistical uncertainty in point estimates. In this paper, we argue that reliable evaluation in the few run deep RL regime cannot ignore the uncertainty in results without running the risk of slowing down progress in the field. We illustrate this point using a case study on the Atari 100k benchmark, where we find substantial discrepancies between conclusions drawn from point estimates alone versus a more thorough statistical analysis. With the aim of increasing the field's confidence in reported results with a handful of runs, we advocate for reporting interval estimates of aggregate performance and propose performance profiles to account for the variability in results, as well as present more robust and efficient aggregate metrics, such as interquartile mean scores, to achieve small uncertainty in results. Using such statistical tools, we scrutinize performance evaluations of existing algorithms on other widely used RL benchmarks including the ALE, Procgen, and the DeepMind Control Suite, again revealing discrepancies in prior comparisons. Our findings call for a change in how we evaluate performance in deep RL, for which we present a more rigorous evaluation methodology, accompanied with an open-source library rliable, to prevent unreliable results from stagnating the field.
Metrics and continuity in reinforcement learning
Feb 02, 2021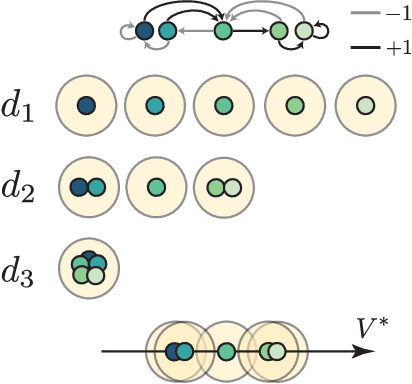
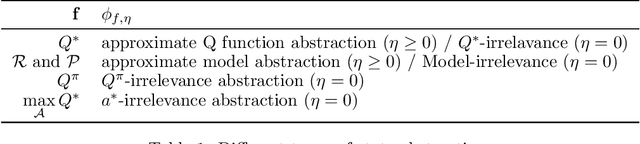
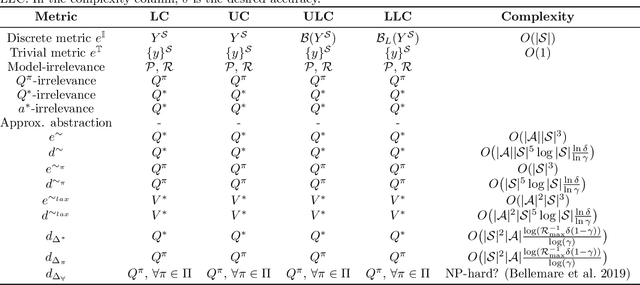
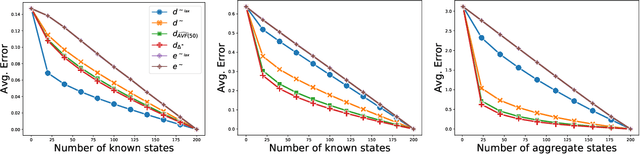
In most practical applications of reinforcement learning, it is untenable to maintain direct estimates for individual states; in continuous-state systems, it is impossible. Instead, researchers often leverage state similarity (whether explicitly or implicitly) to build models that can generalize well from a limited set of samples. The notion of state similarity used, and the neighbourhoods and topologies they induce, is thus of crucial importance, as it will directly affect the performance of the algorithms. Indeed, a number of recent works introduce algorithms assuming the existence of "well-behaved" neighbourhoods, but leave the full specification of such topologies for future work. In this paper we introduce a unified formalism for defining these topologies through the lens of metrics. We establish a hierarchy amongst these metrics and demonstrate their theoretical implications on the Markov Decision Process specifying the reinforcement learning problem. We complement our theoretical results with empirical evaluations showcasing the differences between the metrics considered.