 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlitzGS: City-Scale Gaussian Splatting at Lightning Speed
May 13, 2026We present BlitzGS, a distributed 3DGS framework that reduces active Gaussian workload for fast city-scale reconstruction. BlitzGS manages this workload at three coupled levels. At the system level, the framework shards Gaussians across GPUs by index parity rather than spatial blocks. This approach mitigates the cross-block visibility redundancy inherent in spatial partitioning. Furthermore, it distributes each rendering step through a single cross-GPU exchange that routes projected Gaussians to their tile owners. At the model level, scheduled importance-scoring passes shrink the global Gaussian population. During these passes, the framework generates a per-Gaussian visibility weight to bias density-control updates toward contributing primitives and a per-view importance mask for the view-level renderer. At the view level, BlitzGS trims each camera's active set with a distance-based LOD gate to exclude excessively fine primitives for the current frustum and the importance-based culling mask to skip Gaussians with negligible cross-view contribution. On large-scale benchmarks, BlitzGS matches the rendering quality of recent large-scale baselines while delivering an order-of-magnitude speedup, training city-scale scenes in tens of minutes. Our code is available at https: //github.com/AkierRaee/BlitzGS.
GVGS: Gaussian Visibility-Aware Multi-View Geometry for Accurate Surface Reconstruction
Jan 28, 20263D Gaussian Splatting enables efficient optimization and high-quality rendering, yet accurate surface reconstruction remains challenging. Prior methods improve surface reconstruction by refining Gaussian depth estimates, either via multi-view geometric consistency or through monocular depth priors. However, multi-view constraints become unreliable under large geometric discrepancies, while monocular priors suffer from scale ambiguity and local inconsistency, ultimately leading to inaccurate Gaussian depth supervision. To address these limitations, we introduce a Gaussian visibility-aware multi-view geometric consistency constraint that aggregates the visibility of shared Gaussian primitives across views, enabling more accurate and stable geometric supervision. In addition, we propose a progressive quadtree-calibrated Monocular depth constraint that performs block-wise affine calibration from coarse to fine spatial scales, mitigating the scale ambiguity of depth priors while preserving fine-grained surface details. Extensive experiments on DTU and TNT datasets demonstrate consistent improvements in geometric accuracy over prior Gaussian-based and implicit surface reconstruction methods. Codes are available at an anonymous repository: https://github.com/GVGScode/GVGS.
HUG: Hierarchical Urban Gaussian Splatting with Block-Based Reconstruction
Apr 23, 2025As urban 3D scenes become increasingly complex and the demand for high-quality rendering grows, efficient scene reconstruction and rendering techniques become crucial. We present HUG, a novel approach to address inefficiencies in handling large-scale urban environments and intricate details based on 3D Gaussian splatting. Our method optimizes data partitioning and the reconstruction pipeline by incorporating a hierarchical neural Gaussian representation. We employ an enhanced block-based reconstruction pipeline focusing on improving reconstruction quality within each block and reducing the need for redundant training regions around block boundaries. By integrating neural Gaussian representation with a hierarchical architecture, we achieve high-quality scene rendering at a low computational cost. This is demonstrated by our state-of-the-art results on public benchmarks, which prove the effectiveness and advantages in large-scale urban scene representation.
CD$^2$: Fine-grained 3D Mesh Reconstruction with Twice Chamfer Distance
Jun 01, 2022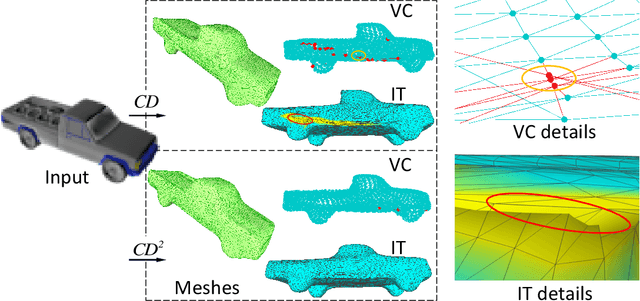
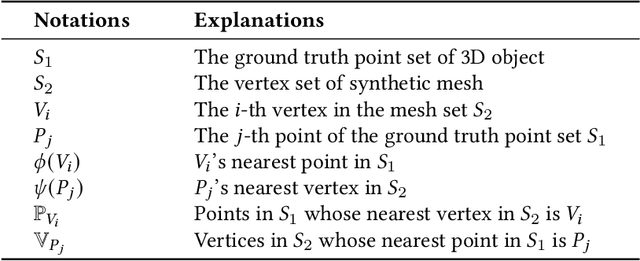

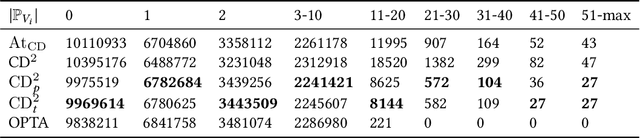
Monocular 3D reconstruction is to reconstruct the shape of object and its other detailed information from a single RGB image. In 3D reconstruction, polygon mesh is the most prevalent expression form obtained from deep learning models, with detailed surface information and low computational cost. However, some state-of-the-art works fail to generate well-structured meshes, these meshes have two severe problems which we call Vertices Clustering and Illegal Twist. By delving into the mesh deformation procedure, we pinpoint the inadequate usage of Chamfer Distance(CD) metric in deep learning model. In this paper, we initially demonstrate the problems resulting from CD with visual examples and quantitative analyses. To solve these problems, we propose a fine-grained reconstruction method CD$^2$ with Chamfer distance adopted twice to perform a plausible and adaptive deformation. Extensive experiments on two 3D datasets and the comparison of our newly proposed mesh quality metrics demonstrate that our CD$^2$ outperforms others by generating better-structured meshes.