 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Domain Few-Shot Learning for Hyperspectral Image Classification Based on Mixup Foundation Model
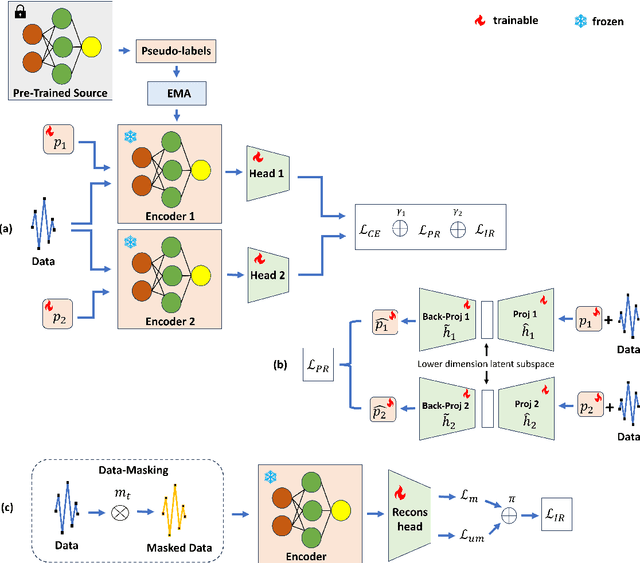
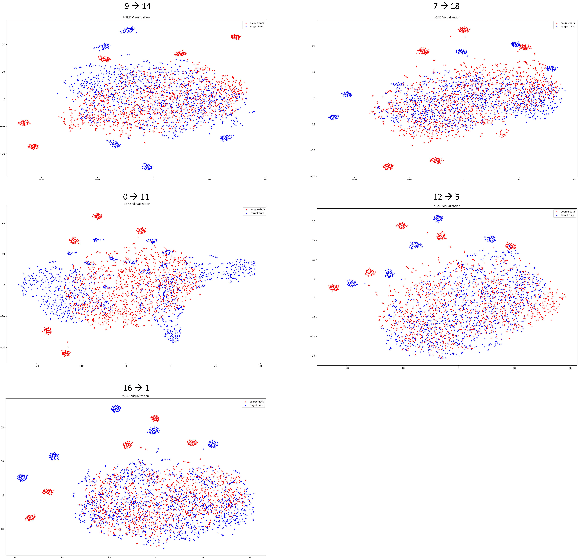
Jan 30, 2026Although cross-domain few-shot learning (CDFSL) for hyper-spectral image (HSI) classification has attracted significant research interest, existing works often rely on an unrealistic data augmentation procedure in the form of external noise to enlarge the sample size, thus greatly simplifying the issue of data scarcity. They involve a large number of parameters for model updates, being prone to the overfitting problem. To the best of our knowledge, none has explored the strength of the foundation model, having strong generalization power to be quickly adapted to downstream tasks. This paper proposes the MIxup FOundation MOdel (MIFOMO) for CDFSL of HSI classifications. MIFOMO is built upon the concept of a remote sensing (RS) foundation model, pre-trained across a large scale of RS problems, thus featuring generalizable features. The notion of coalescent projection (CP) is introduced to quickly adapt the foundation model to downstream tasks while freezing the backbone network. The concept of mixup domain adaptation (MDM) is proposed to address the extreme domain discrepancy problem. Last but not least, the label smoothing concept is implemented to cope with noisy pseudo-label problems. Our rigorous experiments demonstrate the advantage of MIFOMO, where it beats prior arts with up to 14% margin. The source code of MIFOMO is open-sourced in https://github.com/Naeem- Paeedeh/MIFOMO for reproducibility and convenient further study.
Source-Free Cross-Domain Continual Learning
Oct 02, 2025Although existing cross-domain continual learning approaches successfully address many streaming tasks having domain shifts, they call for a fully labeled source domain hindering their feasibility in the privacy constrained environments. This paper goes one step ahead with the problem of source-free cross-domain continual learning where the use of source-domain samples are completely prohibited. We propose the idea of rehearsal-free frequency-aware dynamic prompt collaborations (REFEREE) to cope with the absence of labeled source-domain samples in realm of cross-domain continual learning. REFEREE is built upon a synergy between a source-pre-trained model and a large-scale vision-language model, thus overcoming the problem of sub-optimal generalizations when relying only on a source pre-trained model. The domain shift problem between the source domain and the target domain is handled by a frequency-aware prompting technique encouraging low-frequency components while suppressing high-frequency components. This strategy generates frequency-aware augmented samples, robust against noisy pseudo labels. The noisy pseudo-label problem is further addressed with the uncertainty-aware weighting strategy where the mean and covariance matrix are weighted by prediction uncertainties, thus mitigating the adverse effects of the noisy pseudo label. Besides, the issue of catastrophic forgetting (CF) is overcome by kernel linear discriminant analysis (KLDA) where the backbone network is frozen while the classification is performed using the linear discriminant analysis approach guided by the random kernel method. Our rigorous numerical studies confirm the advantage of our approach where it beats prior arts having access to source domain samples with significant margins.
Black-Box Time-Series Domain Adaptation via Cross-Prompt Foundation Models
Oct 01, 2025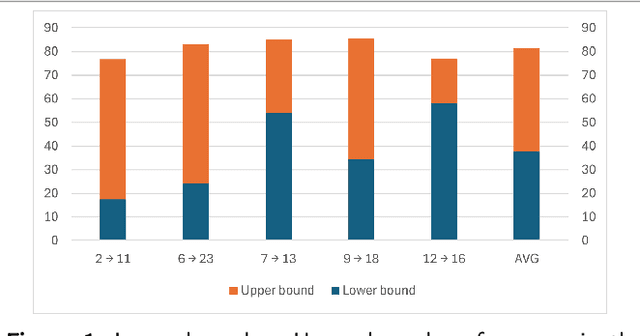

The black-box domain adaptation (BBDA) topic is developed to address the privacy and security issues where only an application programming interface (API) of the source model is available for domain adaptations. Although the BBDA topic has attracted growing research attentions, existing works mostly target the vision applications and are not directly applicable to the time-series applications possessing unique spatio-temporal characteristics. In addition, none of existing approaches have explored the strength of foundation model for black box time-series domain adaptation (BBTSDA). This paper proposes a concept of Cross-Prompt Foundation Model (CPFM) for the BBTSDA problems. CPFM is constructed under a dual branch network structure where each branch is equipped with a unique prompt to capture different characteristics of data distributions. In the domain adaptation phase, the reconstruction learning phase in the prompt and input levels is developed. All of which are built upon a time-series foundation model to overcome the spatio-temporal dynamic. Our rigorous experiments substantiate the advantage of CPFM achieving improved results with noticeable margins from its competitors in three time-series datasets of different application domains.
PROL : Rehearsal Free Continual Learning in Streaming Data via Prompt Online Learning
Jul 16, 2025



The data privacy constraint in online continual learning (OCL), where the data can be seen only once, complicates the catastrophic forgetting problem in streaming data. A common approach applied by the current SOTAs in OCL is with the use of memory saving exemplars or features from previous classes to be replayed in the current task. On the other hand, the prompt-based approach performs excellently in continual learning but with the cost of a growing number of trainable parameters. The first approach may not be applicable in practice due to data openness policy, while the second approach has the issue of throughput associated with the streaming data. In this study, we propose a novel prompt-based method for online continual learning that includes 4 main components: (1) single light-weight prompt generator as a general knowledge, (2) trainable scaler-and-shifter as specific knowledge, (3) pre-trained model (PTM) generalization preserving, and (4) hard-soft updates mechanism. Our proposed method achieves significantly higher performance than the current SOTAs in CIFAR100, ImageNet-R, ImageNet-A, and CUB dataset. Our complexity analysis shows that our method requires a relatively smaller number of parameters and achieves moderate training time, inference time, and throughput. For further study, the source code of our method is available at https://github.com/anwarmaxsum/PROL.
Onboard Optimization and Learning: A Survey
May 07, 2025



Onboard learning is a transformative approach in edge AI, enabling real-time data processing, decision-making, and adaptive model training directly on resource-constrained devices without relying on centralized servers. This paradigm is crucial for applications demanding low latency, enhanced privacy, and energy efficiency. However, onboard learning faces challenges such as limited computational resources, high inference costs, and security vulnerabilities. This survey explores a comprehensive range of methodologies that address these challenges, focusing on techniques that optimize model efficiency, accelerate inference, and support collaborative learning across distributed devices. Approaches for reducing model complexity, improving inference speed, and ensuring privacy-preserving computation are examined alongside emerging strategies that enhance scalability and adaptability in dynamic environments. By bridging advancements in hardware-software co-design, model compression, and decentralized learning, this survey provides insights into the current state of onboard learning to enable robust, efficient, and secure AI deployment at the edge.
Latest Advancements Towards Catastrophic Forgetting under Data Scarcity: A Comprehensive Survey on Few-Shot Class Incremental Learning
Feb 12, 2025Data scarcity significantly complicates the continual learning problem, i.e., how a deep neural network learns in dynamic environments with very few samples. However, the latest progress of few-shot class incremental learning (FSCIL) methods and related studies show insightful knowledge on how to tackle the problem. This paper presents a comprehensive survey on FSCIL that highlights several important aspects i.e. comprehensive and formal objectives of FSCIL approaches, the importance of prototype rectifications, the new learning paradigms based on pre-trained model and language-guided mechanism, the deeper analysis of FSCIL performance metrics and evaluation, and the practical contexts of FSCIL in various areas. Our extensive discussion presents the open challenges, potential solutions, and future directions of FSCIL.
Time and Frequency Synergy for Source-Free Time-Series Domain Adaptations
Oct 23, 2024



The issue of source-free time-series domain adaptations still gains scarce research attentions. On the other hand, existing approaches rely solely on time-domain features ignoring frequency components providing complementary information. This paper proposes Time Frequency Domain Adaptation (TFDA), a method to cope with the source-free time-series domain adaptation problems. TFDA is developed with a dual branch network structure fully utilizing both time and frequency features in delivering final predictions. It induces pseudo-labels based on a neighborhood concept where predictions of a sample group are aggregated to generate reliable pseudo labels. The concept of contrastive learning is carried out in both time and frequency domains with pseudo label information and a negative pair exclusion strategy to make valid neighborhood assumptions. In addition, the time-frequency consistency technique is proposed using the self-distillation strategy while the uncertainty reduction strategy is implemented to alleviate uncertainties due to the domain shift problem. Last but not least, the curriculum learning strategy is integrated to combat noisy pseudo labels. Our experiments demonstrate the advantage of our approach over prior arts with noticeable margins in benchmark problems.
PIP: Prototypes-Injected Prompt for Federated Class Incremental Learning
Jul 30, 2024



Federated Class Incremental Learning (FCIL) is a new direction in continual learning (CL) for addressing catastrophic forgetting and non-IID data distribution simultaneously. Existing FCIL methods call for high communication costs and exemplars from previous classes. We propose a novel rehearsal-free method for FCIL named prototypes-injected prompt (PIP) that involves 3 main ideas: a) prototype injection on prompt learning, b) prototype augmentation, and c) weighted Gaussian aggregation on the server side. Our experiment result shows that the proposed method outperforms the current state of the arts (SOTAs) with a significant improvement (up to 33%) in CIFAR100, MiniImageNet and TinyImageNet datasets. Our extensive analysis demonstrates the robustness of PIP in different task sizes, and the advantage of requiring smaller participating local clients, and smaller global rounds. For further study, source codes of PIP, baseline, and experimental logs are shared publicly in https://github.com/anwarmaxsum/PIP.
Graph Mining under Data scarcity
Jun 07, 2024



Multitude of deep learning models have been proposed for node classification in graphs. However, they tend to perform poorly under labeled-data scarcity. Although Few-shot learning for graphs has been introduced to overcome this problem, the existing models are not easily adaptable for generic graph learning frameworks like Graph Neural Networks (GNNs). Our work proposes an Uncertainty Estimator framework that can be applied on top of any generic GNN backbone network (which are typically designed for supervised/semi-supervised node classification) to improve the node classification performance. A neural network is used to model the Uncertainty Estimator as a probability distribution rather than probabilistic discrete scalar values. We train these models under the classic episodic learning paradigm in the $n$-way, $k$-shot fashion, in an end-to-end setting. Our work demonstrates that implementation of the uncertainty estimator on a GNN backbone network improves the classification accuracy under Few-shot setting without any meta-learning specific architecture. We conduct experiments on multiple datasets under different Few-shot settings and different GNN-based backbone networks. Our method outperforms the baselines, which demonstrates the efficacy of the Uncertainty Estimator for Few-shot node classification on graphs with a GNN.
Cross-Domain Continual Learning via CLAMP
May 12, 2024Artificial neural networks, celebrated for their human-like cognitive learning abilities, often encounter the well-known catastrophic forgetting (CF) problem, where the neural networks lose the proficiency in previously acquired knowledge. Despite numerous efforts to mitigate CF, it remains the significant challenge particularly in complex changing environments. This challenge is even more pronounced in cross-domain adaptation following the continual learning (CL) setting, which is a more challenging and realistic scenario that is under-explored. To this end, this article proposes a cross-domain CL approach making possible to deploy a single model in such environments without additional labelling costs. Our approach, namely continual learning approach for many processes (CLAMP), integrates a class-aware adversarial domain adaptation strategy to align a source domain and a target domain. An assessor-guided learning process is put forward to navigate the learning process of a base model assigning a set of weights to every sample controlling the influence of every sample and the interactions of each loss function in such a way to balance the stability and plasticity dilemma thus preventing the CF problem. The first assessor focuses on the negative transfer problem rejecting irrelevant samples of the source domain while the second assessor prevents noisy pseudo labels of the target domain. Both assessors are trained in the meta-learning approach using random transformation techniques and similar samples of the source domain. Theoretical analysis and extensive numerical validations demonstrate that CLAMP significantly outperforms established baseline algorithms across all experiments by at least $10\%$ margin.