 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManipulider: A Multi-Engine Buoyancy-Controlled Robot for Thrusterless Underwater Gliding and Manipulation
Jun 19, 2026The Manipulider is a buoyancy-actuated underwater robot that enables thrusterless, glide-like locomotion and attitude-based manipulation, while providing a magnetic modular interface for rapid payload swapping (e.g., a gripper or sensors). Four syringe-based buoyancy engines distributed around the body jointly regulate net buoyancy and the center of buoyancy, allowing the vehicle to maintain large tilt angles through static force balance without continuous thrust and to avoid propeller entanglement risks. We present the mechanical and electrical design, calibration procedure, and control architecture. Experiments with a gripper attached (no external payload) show a controllable buoyancy-displacement range of 40 mL per engine ({\approx}160 g total buoyancy authority), maximum statically stable tilts of 64.6° (single-engine) and 61.8° (dual-engine), and representative vertical and tilt-transition dynamics. We further demonstrate tilt regulation, controlled ascent/descent primitives, and a proof-of-concept gripper-based payload-transport sequence without thrusters.
ASCII Art Turns LLMs into VLA Controllers
Jun 19, 2026Vision--Language--Action (VLA) controllers are often built by extending vision--language models (VLMs) with action supervision, relying on multimodal backbones with large data and compute requirements. We demonstrate that a text-only large language model (LLM) can be adapted into a VLA-style controller when visual observations are rendered into a text input using an ASCII representation. This ASCII-as-vision interface enables existing training and deployment stacks for LLMs to efficiently condition on visual state, follow natural-language instructions, and produce constrained, executable actions. We fine-tune and compare multiple LLMs and VLMs across model families and scales, using both expert demonstrations from a planning-based teacher, as well as DAgger for iterative improvement. In a 2D manipulation benchmark, in both simulation and on a physical manipulator, the resulting controllers can identify task-relevant entities and plan feasible action sequences. Our results suggest that ASCII rendering can serve as a lightweight, interpretable modality bridge from images to text, complementing conventional VLA pipelines, and opening directions for VLA research with text-only backbones.
FlowMo-WM: A World Model with Object Momentum and Hidden Ambient Drift
Jun 11, 2026World models in robot learning predict future states from visual observations and actions, enabling agents to reason about the consequences of their controls. However, many action-conditioned models are evaluated in settings where motion is dominated by immediate control, whereas aquatic surface vehicles and other real-world objects continue moving under inertia and are displaced by hidden ambient drift, such as water currents or wind. We propose FlowMo-WM, an end-to-end trainable visual world model that infers object-centric motion state and a predictive long-history context associated with hidden drift from image-action histories without direct supervision of flow fields. FlowMo-WM factorizes image-action history into a short-history latent state, trained to summarize object-centric motion, and a longer-history context, trained to summarize slowly varying exogenous influences. A zero-context residual transition separates action-conditioned base dynamics from context-dependent drift effects during latent rollout. In simulated aquatic surface-vehicle environments with diverse hidden flows, disturbances, and randomized vehicle dynamics, FlowMo-WM improves long-horizon rollout accuracy over representative action-conditioned latent world models. Prediction-time context ablations, in which the inferred context is zeroed or shuffled during rollout, show that the ambient context is important for stable prediction under hidden drift, while frozen linear probes characterize information encoded in the learned factors.
On the Exploration of LM-Based Soft Modular Robot Design
Nov 01, 2024



Recent large language models (LLMs) have demonstrated promising capabilities in modeling real-world knowledge and enhancing knowledge-based generation tasks. In this paper, we further explore the potential of using LLMs to aid in the design of soft modular robots, taking into account both user instructions and physical laws, to reduce the reliance on extensive trial-and-error experiments typically needed to achieve robot designs that meet specific structural or task requirements. Specifically, we formulate the robot design process as a sequence generation task and find that LLMs are able to capture key requirements expressed in natural language and reflect them in the construction sequences of robots. To simplify, rather than conducting real-world experiments to assess design quality, we utilize a simulation tool to provide feedback to the generative model, allowing for iterative improvements without requiring extensive human annotations. Furthermore, we introduce five evaluation metrics to assess the quality of robot designs from multiple angles including task completion and adherence to instructions, supporting an automatic evaluation process. Our model performs well in evaluations for designing soft modular robots with uni- and bi-directional locomotion and stair-descending capabilities, highlighting the potential of using natural language and LLMs for robot design. However, we also observe certain limitations that suggest areas for further improvement.
An Untethered Bioinspired Robotic Tensegrity Dolphin with Multi-Flexibility Design for Aquatic Locomotion
Nov 01, 2024



This paper presents the first steps toward a soft dolphin robot using a bio-inspired approach to mimic dolphin flexibility. The current dolphin robot uses a minimalist approach, with only two actuated cable-driven degrees of freedom actuated by a pair of motors. The actuated tail moves up and down in a swimming motion, but this first proof of concept does not permit controlled turns of the robot. While existing robotic dolphins typically use revolute joints to articulate rigid bodies, our design -- which will be made opensource -- incorporates a flexible tail with tunable silicone skin and actuation flexibility via a cable-driven system, which mimics muscle dynamics and design flexibility with a tunable skeleton structure. The design is also tunable since the backbone can be easily printed in various geometries. The paper provides insights into how a few such variations affect robot motion and efficiency, measured by speed and cost of transport (COT). This approach demonstrates the potential of achieving dolphin-like motion through enhanced flexibility in bio-inspired robotics.
SoftSnap: Rapid Prototyping of Untethered Soft Robots Using Snap-Together Modules
Oct 24, 2024



Soft robots offer adaptability and safe interaction with complex environments. Rapid prototyping kits that allow soft robots to be assembled easily will allow different geometries to be explored quickly to suit different environments or to mimic the motion of biological organisms. We introduce SoftSnap modules: snap-together components that enable the rapid assembly of a class of untethered soft robots. Each SoftSnap module includes embedded computation, motor-driven string actuation, and a flexible thermoplastic polyurethane (TPU) printed structure capable of deforming into various shapes based on the string configuration. These modules can be easily connected with other SoftSnap modules or customizable connectors. We demonstrate the versatility of the SoftSnap system through four configurations: a starfish-like robot, a brittle star robot, a snake robot, a 3D gripper, and a ring-shaped robot. These configurations highlight the ease of assembly, adaptability, and functional diversity of the SoftSnap modules. The SoftSnap modular system offers a scalable, snap-together approach to simplifying soft robot prototyping, making it easier for researchers to explore untethered soft robotic systems rapidly.
Multi-modal Perception Dataset of In-water Objects for Autonomous Surface Vehicles
Apr 29, 2024



This paper introduces the first publicly accessible multi-modal perception dataset for autonomous maritime navigation, focusing on in-water obstacles within the aquatic environment to enhance situational awareness for Autonomous Surface Vehicles (ASVs). This dataset, consisting of diverse objects encountered under varying environmental conditions, aims to bridge the research gap in marine robotics by providing a multi-modal, annotated, and ego-centric perception dataset, for object detection and classification. We also show the applicability of the proposed dataset's framework using deep learning-based open-source perception algorithms that have shown success. We expect that our dataset will contribute to development of the marine autonomy pipeline and marine (field) robotics. Please note this is a work-in-progress paper about our on-going research that we plan to release in full via future publication.
Soft Lattice Modules that Behave Independently and Collectively
Oct 21, 2021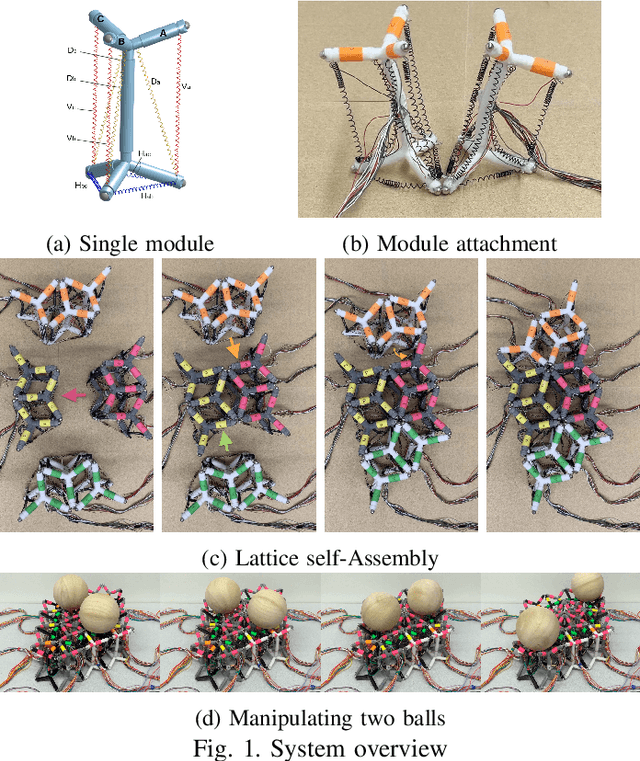
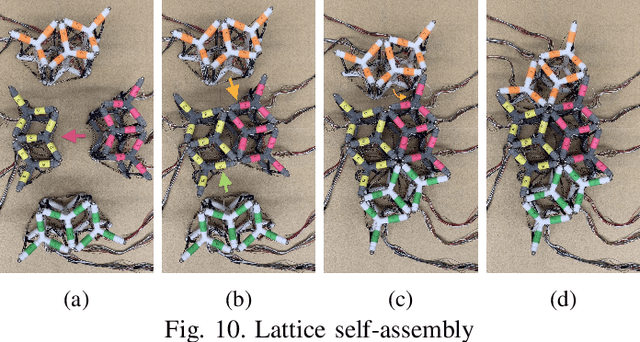
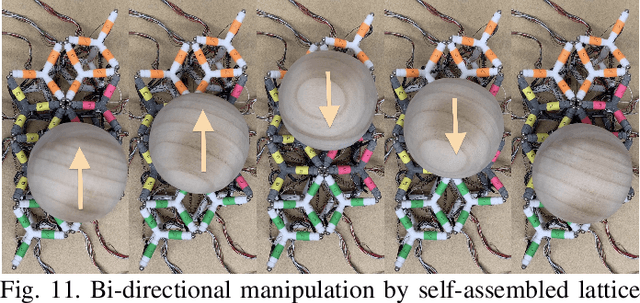
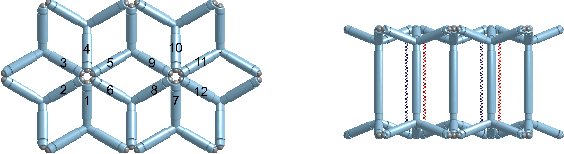
Natural systems integrate the work of many sub-units (cells) toward a large-scale unified goal (morphological and behavioral), which can counteract the effects of unexpected experiences, damage, or simply changes in tasks demands. In this paper, we exploit the opportunities presented by soft, modular, and tensegrity robots to introduce soft lattice modules that parallel the sub-units seen in biological systems. The soft lattice modules are comprised of 3D printed plastic "skeletons", linear contracting shape memory alloy spring actuators, and permanent magnets that enable adhesion between modules. The soft lattice modules are capable of independent locomotion, and can also join with other modules to achieve collective, self-assembled, larger scale tasks such as collective locomotion and moving an object across the surface of the lattice assembly. This work represents a preliminary step toward soft modular systems capable of independent and collective behaviors, and provide a platform for future studies on distributed control.
Piecewise linear regressions for approximating distance metrics
Feb 27, 2020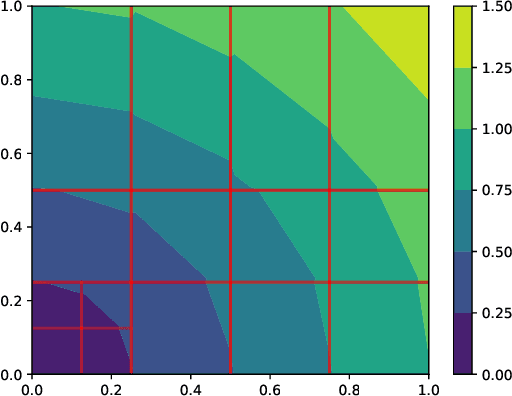
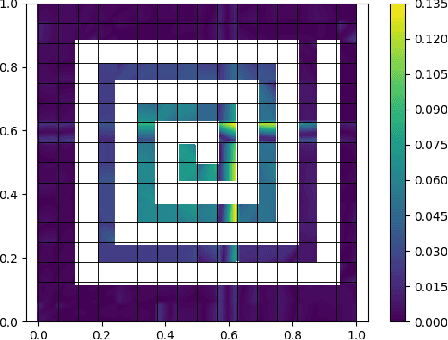
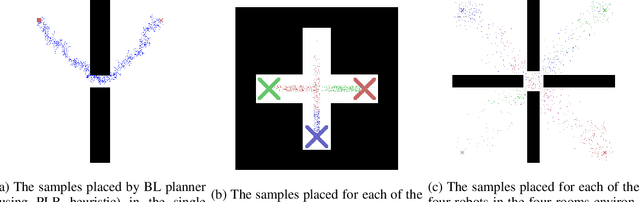
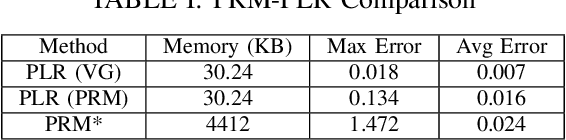
This paper presents a data structure that summarizes distances between configurations across a robot configuration space, using a binary space partition whose cells contain parameters used for a locally linear approximation of the distance function. Querying the data structure is extremely fast, particularly when compared to the graph search required for querying Probabilistic Roadmaps, and memory requirements are promising. The paper explores the use of the data structure constructed for a single robot to provide a heuristic for challenging multi-robot motion planning problems. Potential applications also include the use of remote computation to analyze the space of robot motions, which then might be transmitted on-demand to robots with fewer computational resources.