 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgepySLAM: An Open-Source, Modular, and Extensible Framework for SLAM
Feb 19, 2025pySLAM is an open-source Python framework for Visual SLAM, supporting monocular, stereo, and RGB-D cameras. It provides a flexible interface for integrating both classical and modern local features, making it adaptable to various SLAM tasks. The framework includes different loop closure methods, a volumetric reconstruction pipeline, and support for depth prediction models. Additionally, it offers a suite of tools for visual odometry and SLAM applications. Designed for both beginners and experienced researchers, pySLAM encourages community contributions, fostering collaborative development in the field of Visual SLAM.
PLVS: A SLAM System with Points, Lines, Volumetric Mapping, and 3D Incremental Segmentation
Sep 19, 2023This document presents PLVS: a real-time system that leverages sparse SLAM, volumetric mapping, and 3D unsupervised incremental segmentation. PLVS stands for Points, Lines, Volumetric mapping, and Segmentation. It supports RGB-D and Stereo cameras, which may be optionally equipped with IMUs. The SLAM module is keyframe-based, and extracts and tracks sparse points and line segments as features. Volumetric mapping runs in parallel with respect to the SLAM front-end and generates a 3D reconstruction of the explored environment by fusing point clouds backprojected from keyframes. Different volumetric mapping methods are supported and integrated in PLVS. We use a novel reprojection error to bundle-adjust line segments. This error exploits available depth information to stabilize the position estimates of line segment endpoints. An incremental and geometric-based segmentation method is implemented and integrated for RGB-D cameras in the PLVS framework. We present qualitative and quantitative evaluations of the PLVS framework on some publicly available datasets. The appendix details the adopted stereo line triangulation method and provides a derivation of the Jacobians we used for line error terms. The software is available as open-source.
3D Multi-Robot Exploration with a Two-Level Coordination Strategy and Prioritization
Jul 07, 2023



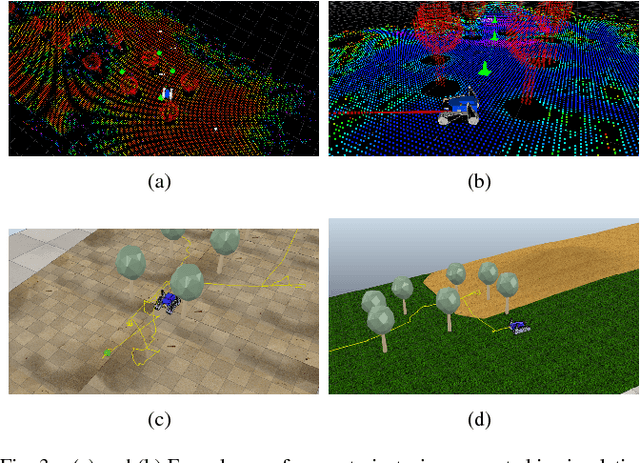
This work presents a 3D multi-robot exploration framework for a team of UGVs moving on uneven terrains. The framework was designed by casting the two-level coordination strategy presented in [1] into the context of multi-robot exploration. The resulting distributed exploration technique minimizes and explicitly manages the occurrence of conflicts and interferences in the robot team. Each robot selects where to scan next by using a receding horizon next-best-view approach [2]. A sampling-based tree is directly expanded on segmented traversable regions of the terrain 3D map to generate the candidate next viewpoints. During the exploration, users can assign locations with higher priorities on-demand to steer the robot exploration toward areas of interest. The proposed framework can be also used to perform coverage tasks in the case a map of the environment is a priori provided as input. An open-source implementation is available online.
3D Multi-Robot Patrolling with a Two-Level Coordination Strategy
Jun 23, 2019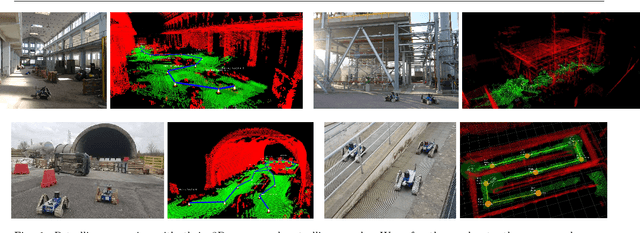
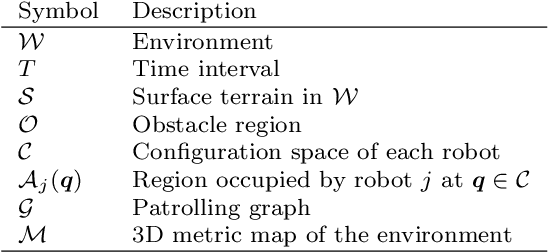
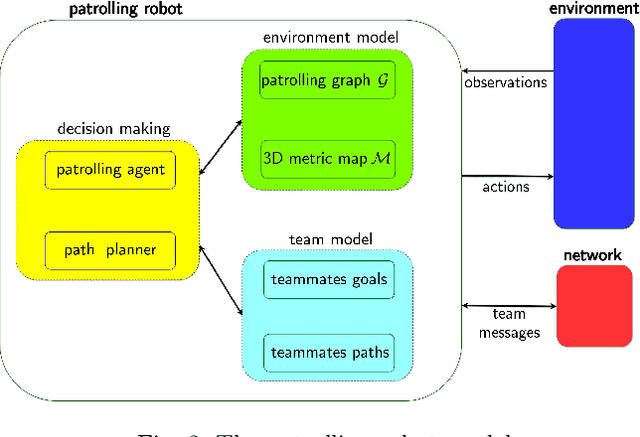
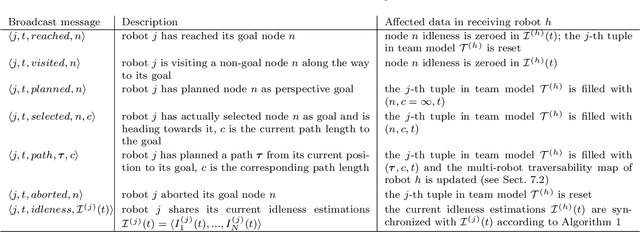
Teams of UGVs patrolling harsh and complex 3D environments can experience interference and spatial conflicts with one another. Neglecting the occurrence of these events crucially hinders both soundness and reliability of a patrolling process. This work presents a distributed multi-robot patrolling technique, which uses a two-level coordination strategy to minimize and explicitly manage the occurrence of conflicts and interference. The first level guides the agents to single out exclusive target nodes on a topological map. This target selection relies on a shared idleness representation and a coordination mechanism preventing topological conflicts. The second level hosts coordination strategies based on a metric representation of space and is supported by a 3D SLAM system. Here, each robot path planner negotiates spatial conflicts by applying a multi-robot traversability function. Continuous interactions between these two levels ensure coordination and conflicts resolution. Both simulations and real-world experiments are presented to validate the performances of the proposed patrolling strategy in 3D environments. Results show this is a promising solution for managing spatial conflicts and preventing deadlocks.
A Hybrid Approach for Trajectory Control Design
Jan 05, 2019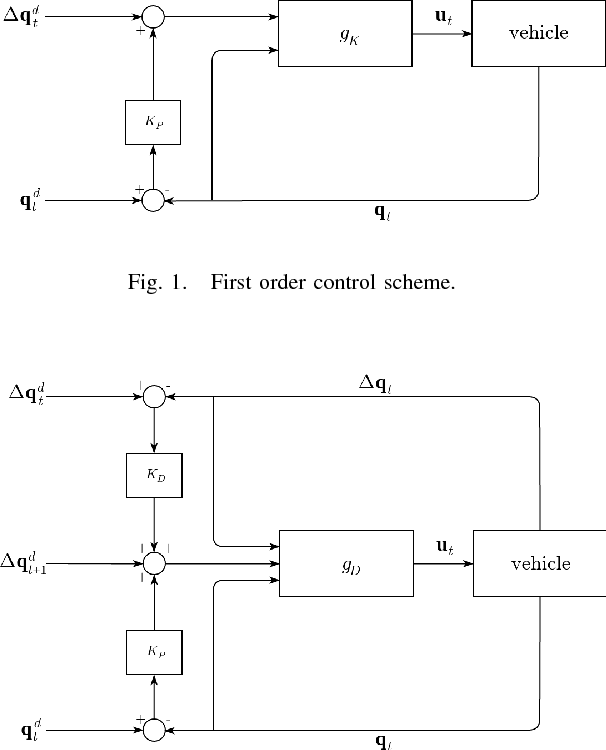
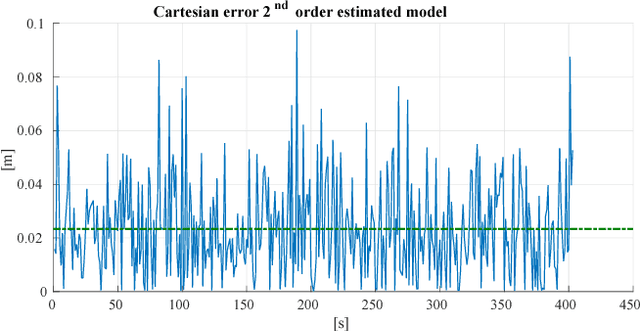
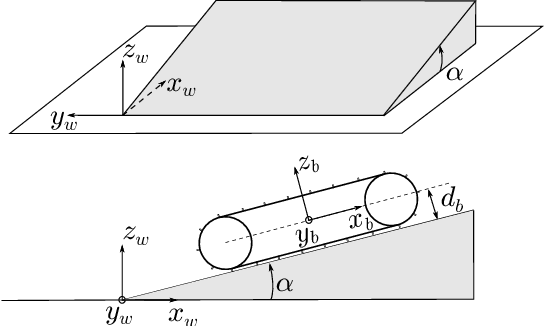
This work presents a methodology to design trajectory tracking feedback control laws, which embed non-parametric statistical models, such as Gaussian Processes (GPs). The aim is to minimize unmodeled dynamics such as undesired slippages. The proposed approach has the benefit of avoiding complex terramechanics analysis to directly estimate from data the robot dynamics on a wide class of trajectories. Experiments in both real and simulated environments prove that the proposed methodology is promising.
RCAMP: A Resilient Communication-Aware Motion Planner for Mobile Robots with Autonomous Repair of Wireless Connectivity
Oct 18, 2017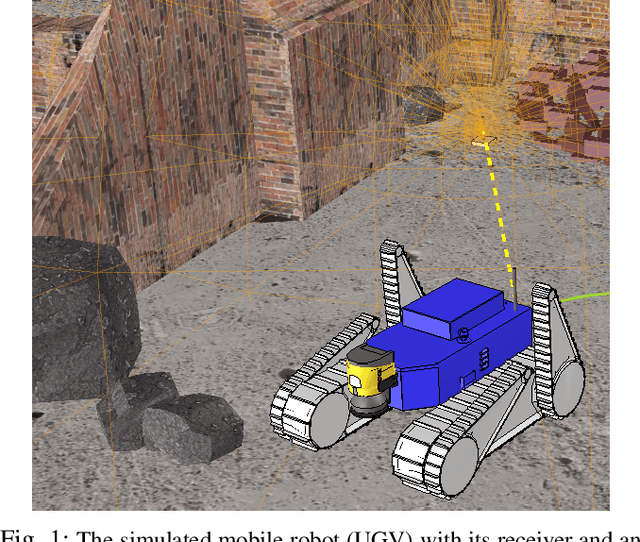
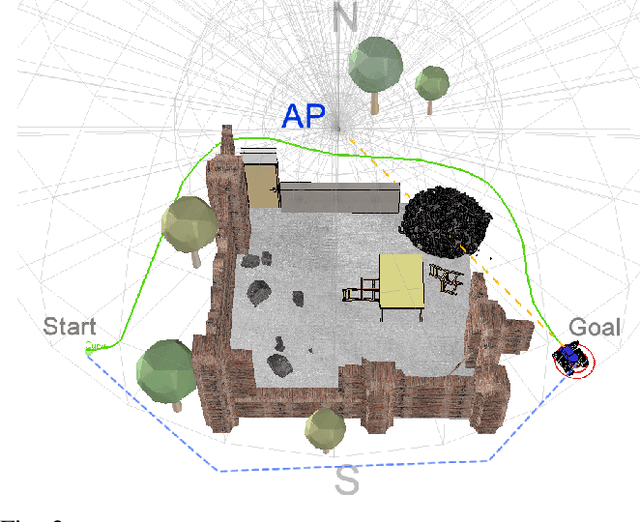
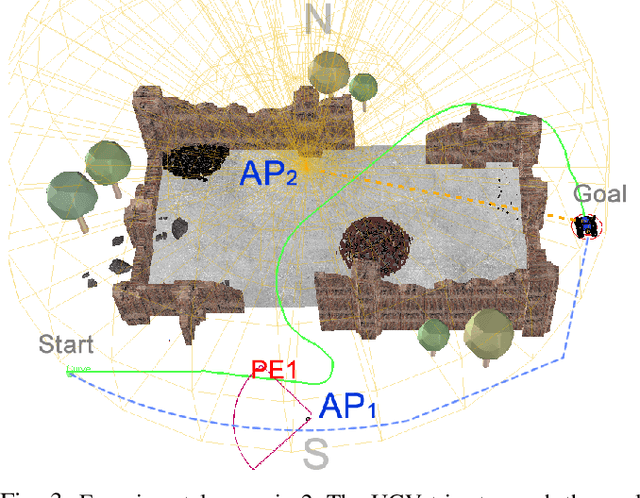
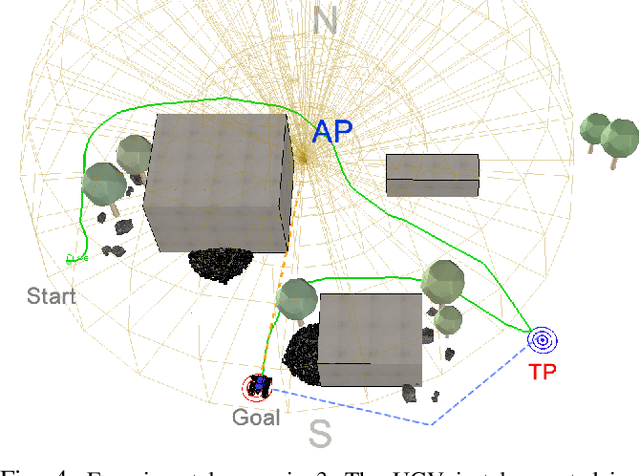
Mobile robots, be it autonomous or teleoperated, require stable communication with the base station to exchange valuable information. Given the stochastic elements in radio signal propagation, such as shadowing and fading, and the possibilities of unpredictable events or hardware failures, communication loss often presents a significant mission risk, both in terms of probability and impact, especially in Urban Search and Rescue (USAR) operations. Depending on the circumstances, disconnected robots are either abandoned or attempt to autonomously back-trace their way to the base station. Although recent results in Communication-Aware Motion Planning can be used to effectively manage connectivity with robots, there are no results focusing on autonomously re-establishing the wireless connectivity of a mobile robot without back-tracking or using detailed a priori information of the network. In this paper, we present a robust and online radio signal mapping method using Gaussian Random Fields and propose a Resilient Communication-Aware Motion Planner (RCAMP) that integrates the above signal mapping framework with a motion planner. RCAMP considers both the environment and the physical constraints of the robot, based on the available sensory information. We also propose a self-repair strategy using RCMAP, that takes both connectivity and the goal position into account when driving to a connection-safe position in the event of a communication loss. We demonstrate the proposed planner in a set of realistic simulations of an exploration task in single or multi-channel communication scenarios.