 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgent Utilities over Generalized Voronoi Regions and their Gradients
Jun 16, 2026In this paper, we generalize the concept of Voronoi regions, define agent utility as the integral of a utility density over the corresponding Voronoi region, derive gradients of the utility, and illustrate the approach in a two-team example from soccer. The generalization of Voronoi regions is in the form of so-called Cost-Induced Voronoi (CIV) regions, where the agent state space may differ from the space being partitioned. One example of such regions is when the cost is given by the optimal solution of an LQR control problem. Then the agent states include position as well as velocity, while the partitioned space only includes positions. The agent utility is defined by integrating some utility density over the CIV region of the agent. This utility density might be the probability density of some beneficial event, such as receiving a pass in soccer. The utility is then the overall probability of receiving a pass and the gradient represents a way to improve that probability. We show how this utility gradient can be computed using the Reynolds Transport Theorem from fluid mechanics, and that this approach achieves similar accuracy while reducing computation time by about an order of magnitude compared to a baseline finite-difference approximation.
Progress Constraints for Reinforcement Learning in Behavior Trees
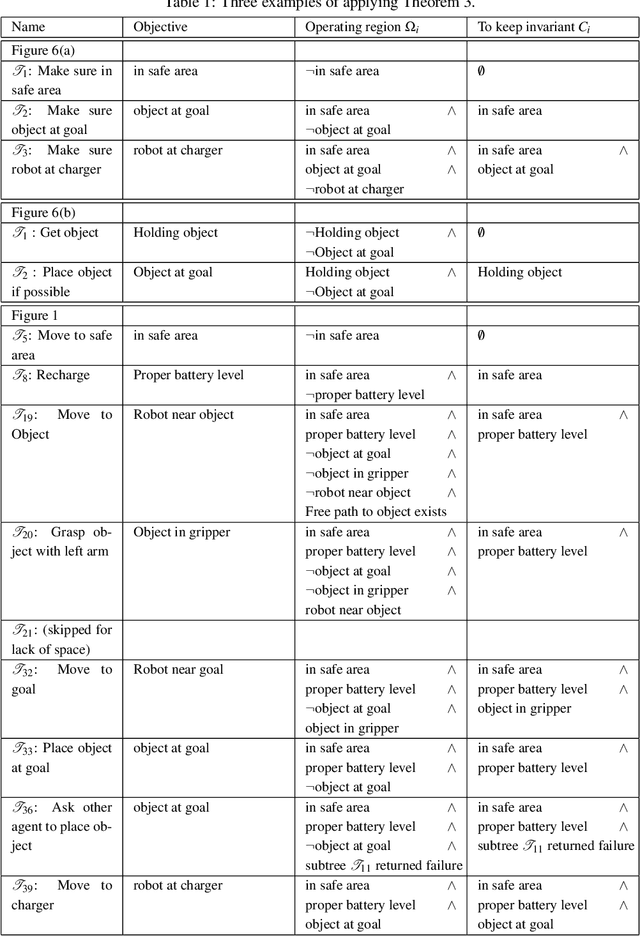
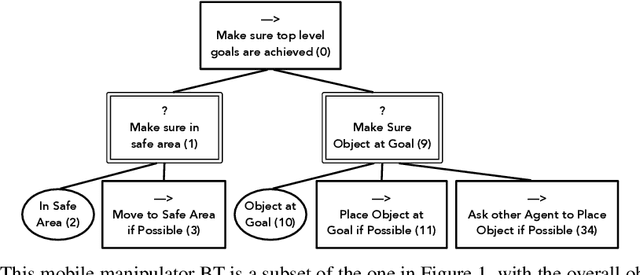
Feb 06, 2026Behavior Trees (BTs) provide a structured and reactive framework for decision-making, commonly used to switch between sub-controllers based on environmental conditions. Reinforcement Learning (RL), on the other hand, can learn near-optimal controllers but sometimes struggles with sparse rewards, safe exploration, and long-horizon credit assignment. Combining BTs with RL has the potential for mutual benefit: a BT design encodes structured domain knowledge that can simplify RL training, while RL enables automatic learning of the controllers within BTs. However, naive integration of BTs and RL can lead to some controllers counteracting other controllers, possibly undoing previously achieved subgoals, thereby degrading the overall performance. To address this, we propose progress constraints, a novel mechanism where feasibility estimators constrain the allowed action set based on theoretical BT convergence results. Empirical evaluations in a 2D proof-of-concept and a high-fidelity warehouse environment demonstrate improved performance, sample efficiency, and constraint satisfaction, compared to prior methods of BT-RL integration.
SMaRCSim: Maritime Robotics Simulation Modules
Jun 09, 2025Developing new functionality for underwater robots and testing them in the real world is time-consuming and resource-intensive. Simulation environments allow for rapid testing before field deployment. However, existing tools lack certain functionality for use cases in our project: i) developing learning-based methods for underwater vehicles; ii) creating teams of autonomous underwater, surface, and aerial vehicles; iii) integrating the simulation with mission planning for field experiments. A holistic solution to these problems presents great potential for bringing novel functionality into the underwater domain. In this paper we present SMaRCSim, a set of simulation packages that we have developed to help us address these issues.
Multi-Agent Obstacle Avoidance using Velocity Obstacles and Control Barrier Functions
Sep 16, 2024



Velocity Obstacles (VO) methods form a paradigm for collision avoidance strategies among moving obstacles and agents. While VO methods perform well in simple multi-agent environments, they don't guarantee safety and can show overly conservative behavior in common situations. In this paper, we propose to combine a VO-strategy for guidance with a CBF-approach for safety, which overcomes the overly conservative behavior of VOs and formally guarantees safety. We validate our method in a baseline comparison study, using 2nd order integrator and car-like dynamics. Results support that our method outperforms the baselines w.r.t. path smoothness, collision avoidance, and success rates.
BVR Gym: A Reinforcement Learning Environment for Beyond-Visual-Range Air Combat
Mar 26, 2024Creating new air combat tactics and discovering novel maneuvers can require numerous hours of expert pilots' time. Additionally, for each different combat scenario, the same strategies may not work since small changes in equipment performance may drastically change the air combat outcome. For this reason, we created a reinforcement learning environment to help investigate potential air combat tactics in the field of beyond-visual-range (BVR) air combat: the BVR Gym. This type of air combat is important since long-range missiles are often the first weapon to be used in aerial combat. Some existing environments provide high-fidelity simulations but are either not open source or are not adapted to the BVR air combat domain. Other environments are open source but use less accurate simulation models. Our work provides a high-fidelity environment based on the open-source flight dynamics simulator JSBSim and is adapted to the BVR air combat domain. This article describes the building blocks of the environment and some use cases.
Deep Learning Based Situation Awareness for Multiple Missiles Evasion
Feb 07, 2024



As the effective range of air-to-air missiles increases, it becomes harder for human operators to maintain the situational awareness needed to keep a UAV safe. In this work, we propose a decision support tool to help UAV operators in Beyond Visual Range (BVR) air combat scenarios assess the risks of different options and make decisions based on those. Earlier work focused on the threat posed by a single missile, and in this work, we extend the ideas to several missile threats. The proposed method uses Deep Neural Networks (DNN) to learn from high-fidelity simulations to provide the operator with an outcome estimate for a set of different strategies. Our results demonstrate that the proposed system can manage multiple incoming missiles, evaluate a family of options, and recommend the least risky course of action.
An Extended Convergence Result for Behaviour Tree Controllers
Aug 17, 2023



Behavior trees (BTs) are an optimally modular framework to assemble hierarchical hybrid control policies from a set of low-level control policies using a tree structure. Many robotic tasks are naturally decomposed into a hierarchy of control tasks, and modularity is a well-known tool for handling complexity, therefor behavior trees have garnered widespread usage in the robotics community. In this paper, we study the convergence of BTs, in the sense of reaching a desired part of the state space. Earlier results on BT convergence were often tailored to specific families of BTs, created using different design principles. The results of this paper generalize the earlier results and also include new cases of cyclic switching not covered in the literature.
Improving the performance of Learned Controllers in Behavior Trees using Value Function Estimates at Switching Boundaries
Jun 12, 2023Behavior trees represent a modular way to create an overall controller from a set of sub-controllers solving different sub-problems. These sub-controllers can be created in different ways, such as classical model based control or reinforcement learning (RL). If each sub-controller satisfies the preconditions of the next sub-controller, the overall controller will achieve the overall goal. However, even if all sub-controllers are locally optimal in achieving the preconditions of the next, with respect to some performance metric such as completion time, the overall controller might be far from optimal with respect to the same performance metric. In this paper we show how the performance of the overall controller can be improved if we use approximations of value functions to inform the design of a sub-controller of the needs of the next one. We also show how, under certain assumptions, this leads to a globally optimal controller when the process is executed on all sub-controllers. Finally, this result also holds when some of the sub-controllers are already given, i.e., if we are constrained to use some existing sub-controllers the overall controller will be globally optimal given this constraint.
Behavior Trees in Robot Control Systems
Mar 24, 2022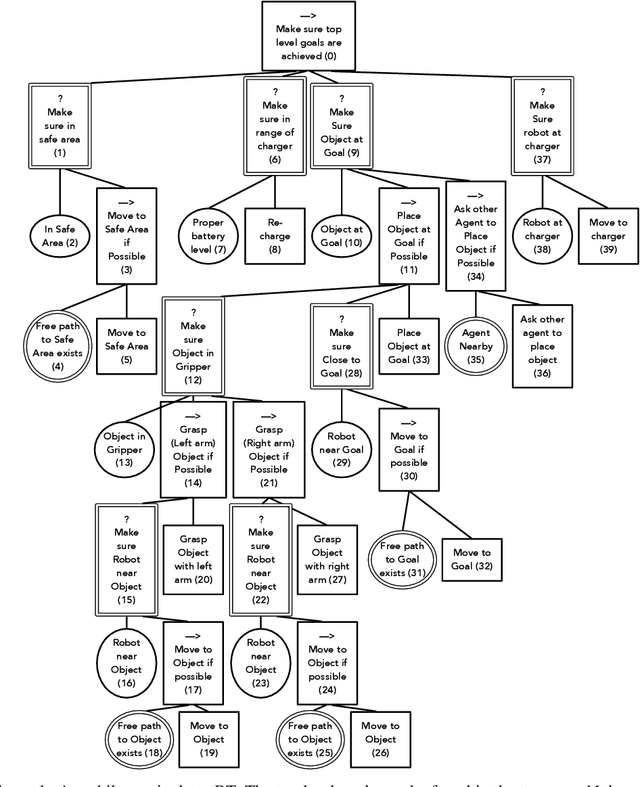
In this paper we will give a control theoretic perspective on the research area of behavior trees in robotics. The key idea underlying behavior trees is to make use of modularity, hierarchies and feedback, in order to handle the complexity of a versatile robot control system. Modularity is a well-known tool to handle software complexity by enabling development, debugging and extension of separate modules without having detailed knowledge of the entire system. A hierarchy of such modules is natural, since robot tasks can often be decomposed into a hierarchy of sub-tasks. Finally, feedback control is a fundamental tool for handling uncertainties and disturbances in any low level control system, but in order to enable feedback control on the higher level, where one module decides what submodule to execute, information regarding progress and applicability of each submodule needs to be shared in the module interfaces. We will describe how these three concepts come to use in theoretical analysis, practical design, as well as extensions and combinations with other ideas from control theory and robotics.
Continuous-Time Behavior Trees as Discontinuous Dynamical Systems
Sep 03, 2021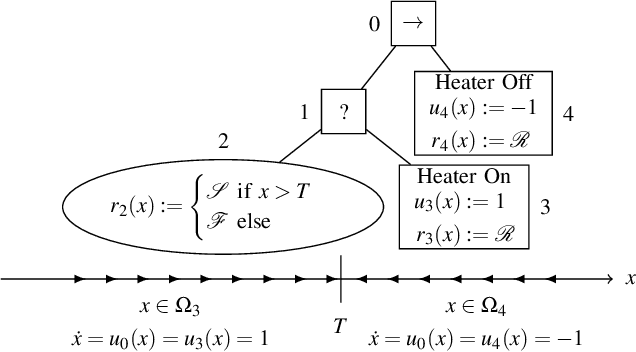
Behavior trees represent a hierarchical and modular way of combining several low-level control policies into a high-level task-switching policy. Hybrid dynamical systems can also be seen in terms of task switching between different policies, and therefore several comparisons between behavior trees and hybrid dynamical systems have been made, but only informally, and only in discrete time. A formal continuous-time formulation of behavior trees has been lacking. Additionally, convergence analyses of specific classes of behavior tree designs have been made, but not for general designs. In this letter, we provide the first continuous-time formulation of behavior trees, show that they can be seen as discontinuous dynamical systems (a subclass of hybrid dynamical systems), which enables the application of existence and uniqueness results to behavior trees, and finally, provide sufficient conditions under which such systems will converge to a desired region of the state space for general designs. With these results, a large body of results on continuous-time dynamical systems can be brought to use when designing behavior tree controllers.