 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Modelling of Driving Behaviors in Interactive Driving Scenarios based on Cumulative Prospect Theory
Jul 19, 2019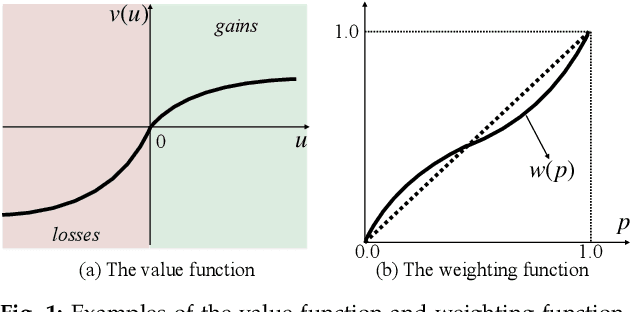
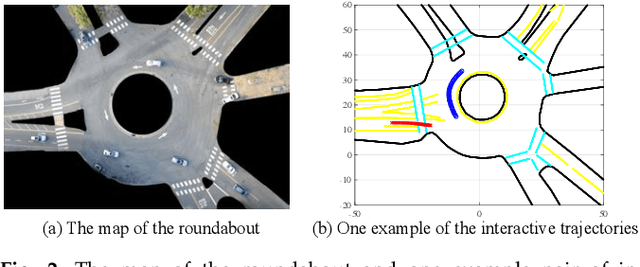
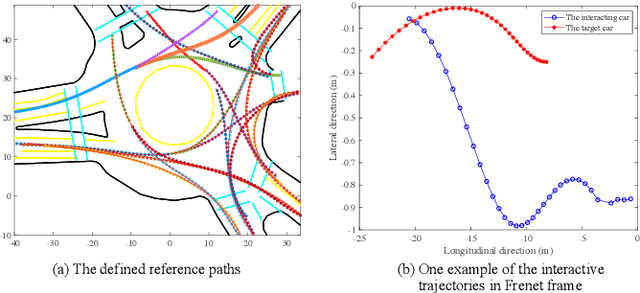
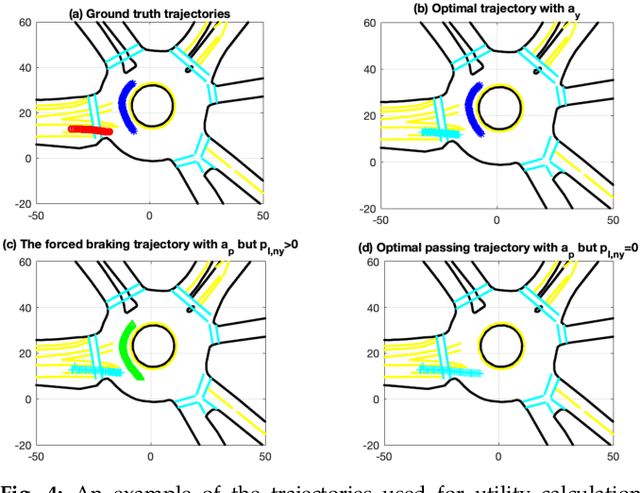
Understanding human driving behavior is important for autonomous vehicles. In this paper, we propose an interpretable human behavior model in interactive driving scenarios based on the cumulative prospect theory (CPT). As a non-expected utility theory, CPT can well explain some systematically biased or ``irrational'' behavior/decisions of human that cannot be explained by the expected utility theory. Hence, the goal of this work is to formulate the human drivers' behavior generation model with CPT so that some ``irrational'' behavior or decisions of human can be better captured and predicted. Towards such a goal, we first develop a CPT-driven decision-making model focusing on driving scenarios with two interacting agents. A hierarchical learning algorithm is proposed afterward to learn the utility function, the value function, and the decision weighting function in the CPT model. A case study for roundabout merging is also provided as verification. With real driving data, the prediction performances of three different models are compared: a predefined model based on time-to-collision (TTC), a learning-based model based on neural networks, and the proposed CPT-based model. The results show that the proposed model outperforms the TTC model and achieves similar performance as the learning-based model with much less training data and better interpretability.
Behavior Planning of Autonomous Cars with Social Perception
May 02, 2019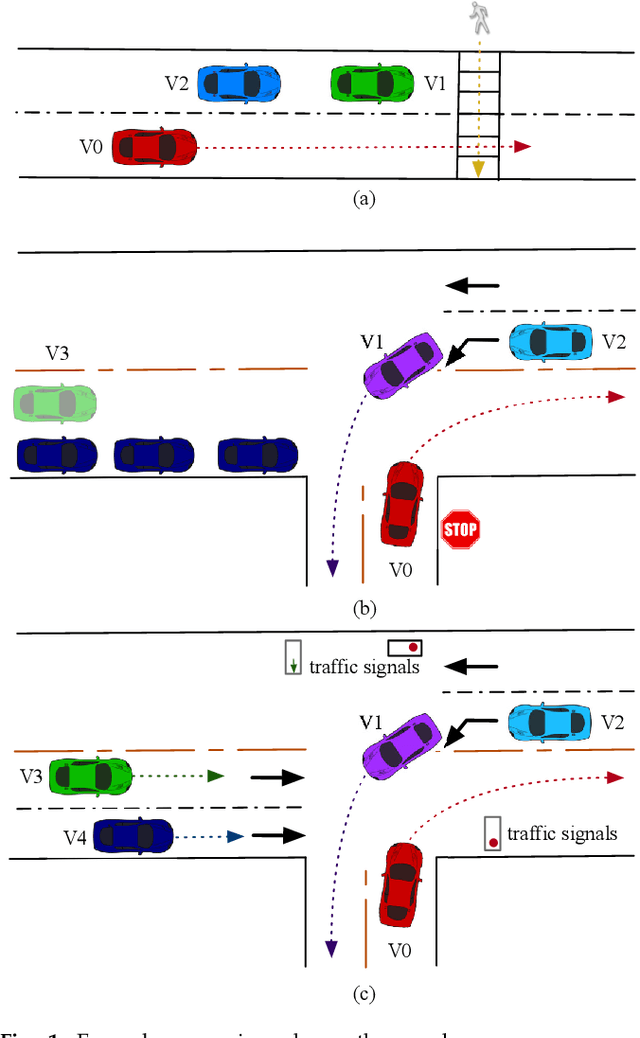
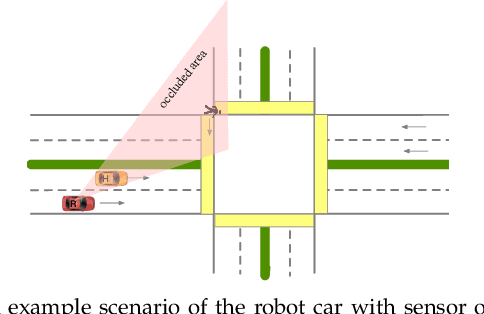
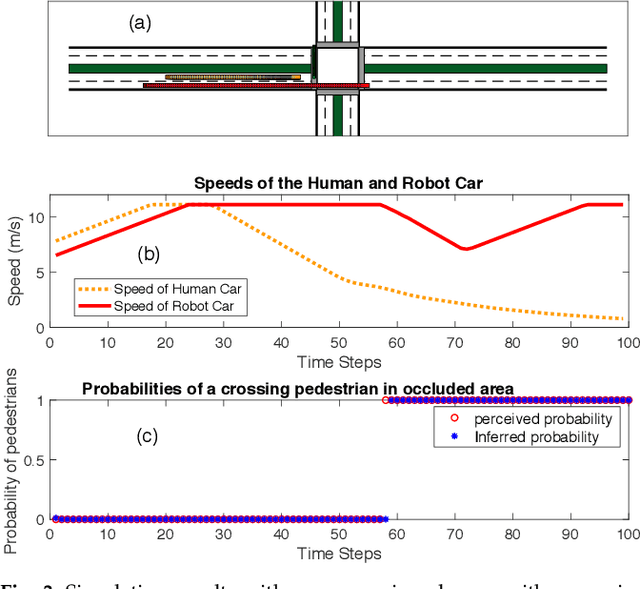
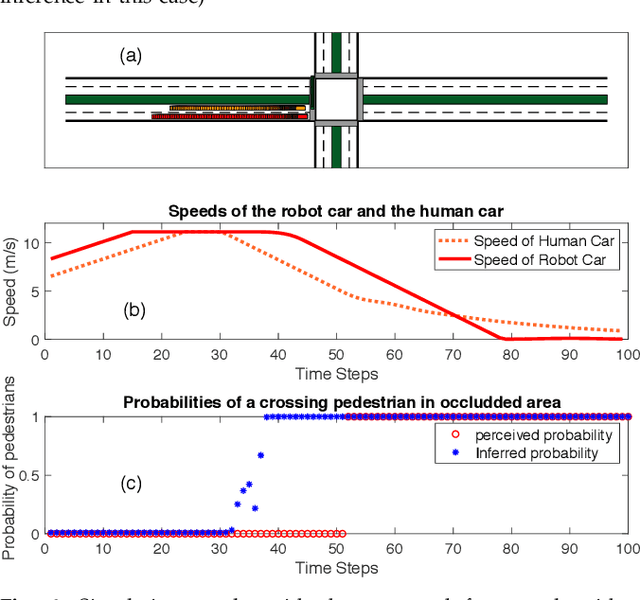
Autonomous cars have to navigate in dynamic environment which can be full of uncertainties. The uncertainties can come either from sensor limitations such as occlusions and limited sensor range, or from probabilistic prediction of other road participants, or from unknown social behavior in a new area. To safely and efficiently drive in the presence of these uncertainties, the decision-making and planning modules of autonomous cars should intelligently utilize all available information and appropriately tackle the uncertainties so that proper driving strategies can be generated. In this paper, we propose a social perception scheme which treats all road participants as distributed sensors in a sensor network. By observing the individual behaviors as well as the group behaviors, uncertainties of the three types can be updated uniformly in a belief space. The updated beliefs from the social perception are then explicitly incorporated into a probabilistic planning framework based on Model Predictive Control (MPC). The cost function of the MPC is learned via inverse reinforcement learning (IRL). Such an integrated probabilistic planning module with socially enhanced perception enables the autonomous vehicles to generate behaviors which are defensive but not overly conservative, and socially compatible. The effectiveness of the proposed framework is verified in simulation on an representative scenario with sensor occlusions.
Towards Better Human Robot Collaboration with Robust Plan Recognition and Trajectory Prediction
Mar 20, 2019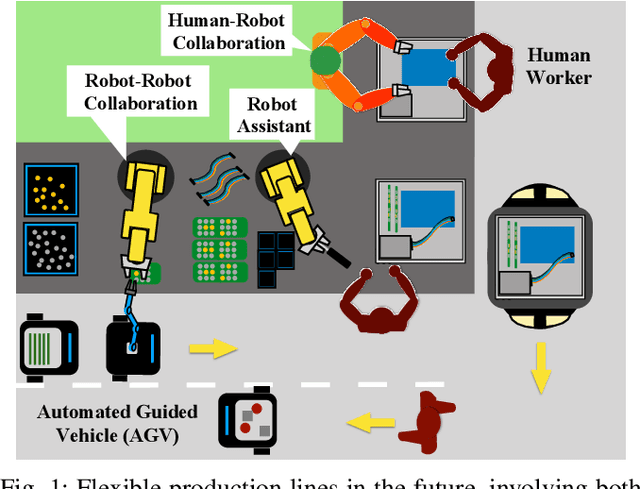
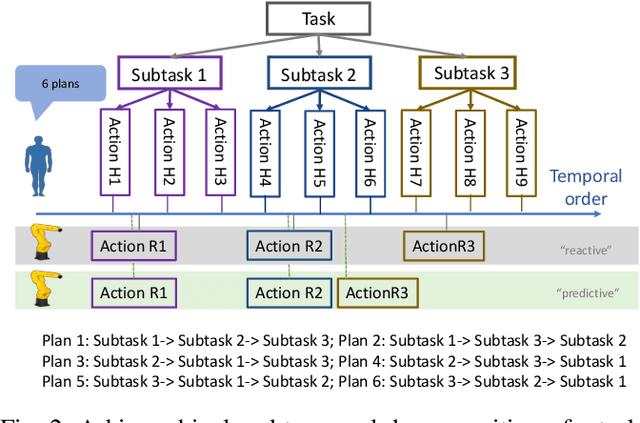
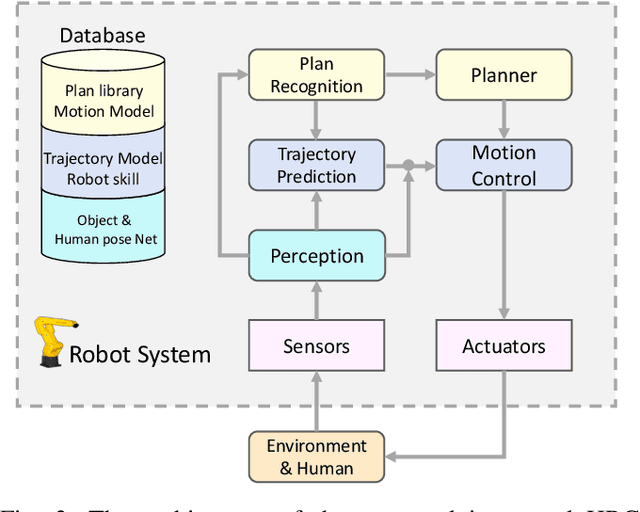

Human robot collaboration (HRC) is becoming increasingly important as the paradigm of manufacturing is shifting from mass production to mass customization. The introduction of HRC can significantly improve the flexibility and intelligence of automation. However, due to the stochastic and time-varying nature of human collaborators, it is challenging for the robot to efficiently and accurately identify the plan of human and respond in a safe manner. To address this challenge, we propose an integrated human robot collaboration framework in this paper which includes both plan recognition and trajectory prediction. Such a framework enables the robots to perceive, predict and adapt their actions to the human's plan and intelligently avoid collisions with the human based on the predicted human trajectory. Moreover, by explicitly leveraging the hierarchical relationship between the plan and trajectories, more robust plan recognition performance can be achieved. Experiments are conducted on an industrial robot to verify the proposed framework, which shows that our proposed framework can not only assure safe HRC, but also improve the time efficiency of the HRC team, and the plan recognition module is not sensitive to noises.
Towards a Fatality-Aware Benchmark of Probabilistic Reaction Prediction in Highly Interactive Driving Scenarios
Sep 10, 2018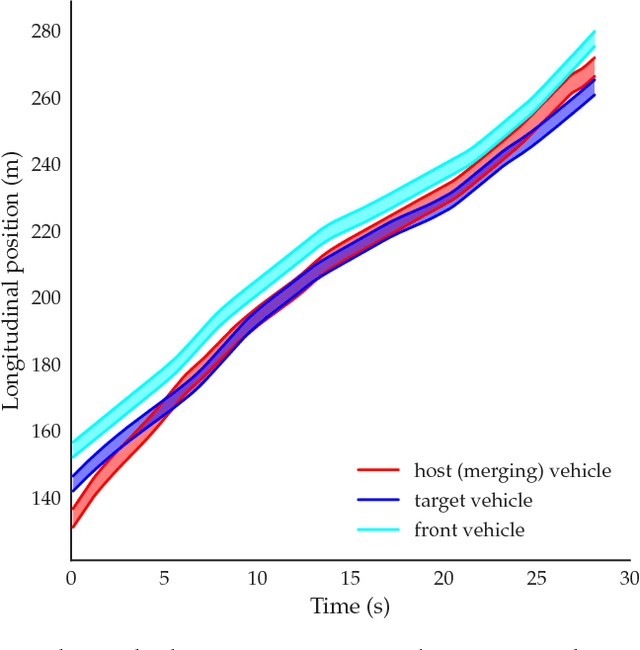
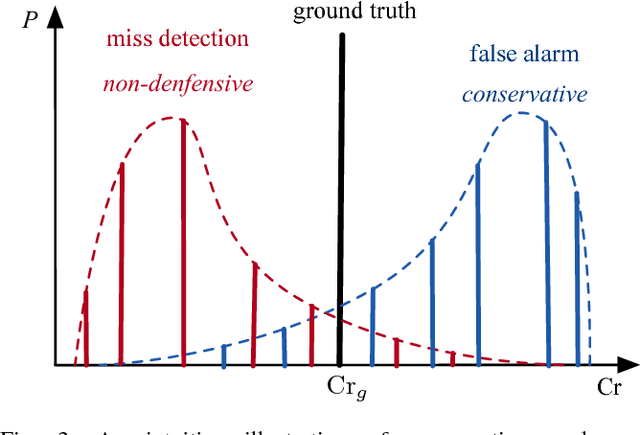
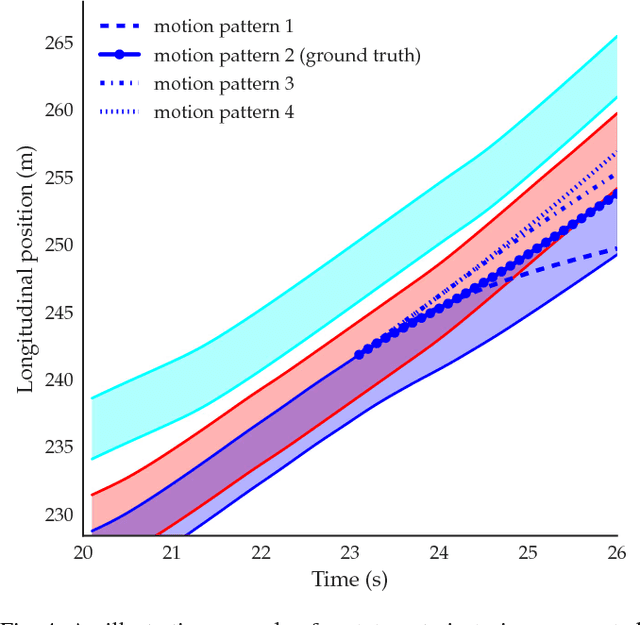
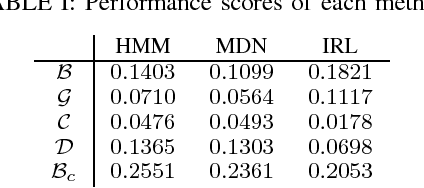
Autonomous vehicles should be able to generate accurate probabilistic predictions for uncertain behavior of other road users. Moreover, reactive predictions are necessary in highly interactive driving scenarios to answer "what if I take this action in the future" for autonomous vehicles. There is no existing unified framework to homogenize the problem formulation, representation simplification, and evaluation metric for various prediction methods, such as probabilistic graphical models (PGM), neural networks (NN) and inverse reinforcement learning (IRL). In this paper, we formulate a probabilistic reaction prediction problem, and reveal the relationship between reaction and situation prediction problems. We employ prototype trajectories with designated motion patterns other than "intention" to homogenize the representation so that probabilities corresponding to each trajectory generated by different methods can be evaluated. We also discuss the reasons why "intention" is not suitable to serve as a motion indicator in highly interactive scenarios. We propose to use Brier score as the baseline metric for evaluation. In order to reveal the fatality of the consequences when the predictions are adopted by decision-making and planning, we propose a fatality-aware metric, which is a weighted Brier score based on the criticality of the trajectory pairs of the interacting entities. Conservatism and non-defensiveness are defined from the weighted Brier score to indicate the consequences caused by inaccurate predictions. Modified methods based on PGM, NN and IRL are provided to generate probabilistic reaction predictions in an exemplar scenario of nudging from a highway ramp. The results are evaluated by the baseline and proposed metrics to construct a mini benchmark. Analysis on the properties of each method is also provided by comparing the baseline and proposed metric scores.
Probabilistic Prediction of Interactive Driving Behavior via Hierarchical Inverse Reinforcement Learning
Sep 09, 2018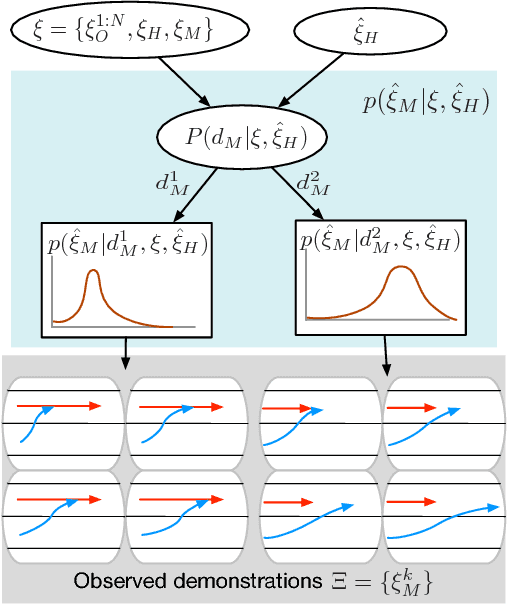
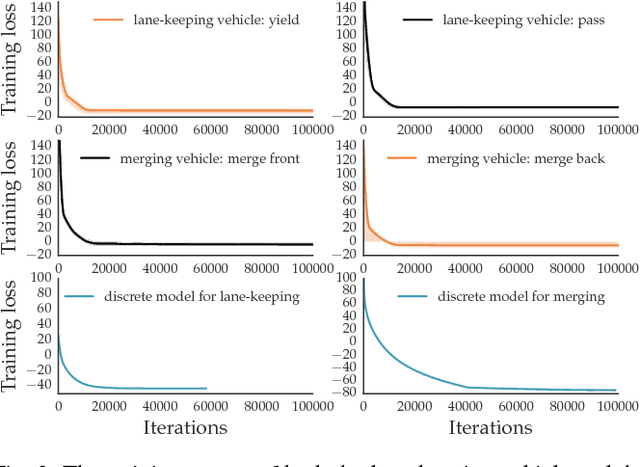
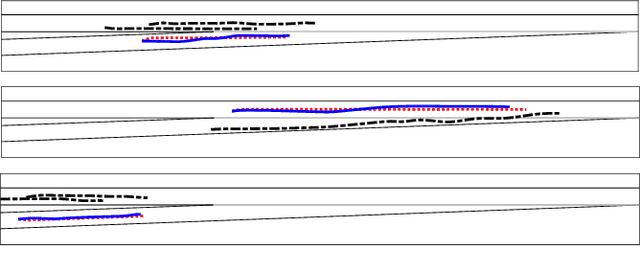
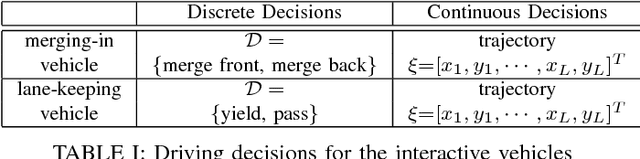
Autonomous vehicles (AVs) are on the road. To safely and efficiently interact with other road participants, AVs have to accurately predict the behavior of surrounding vehicles and plan accordingly. Such prediction should be probabilistic, to address the uncertainties in human behavior. Such prediction should also be interactive, since the distribution over all possible trajectories of the predicted vehicle depends not only on historical information, but also on future plans of other vehicles that interact with it. To achieve such interaction-aware predictions, we propose a probabilistic prediction approach based on hierarchical inverse reinforcement learning (IRL). First, we explicitly consider the hierarchical trajectory-generation process of human drivers involving both discrete and continuous driving decisions. Based on this, the distribution over all future trajectories of the predicted vehicle is formulated as a mixture of distributions partitioned by the discrete decisions. Then we apply IRL hierarchically to learn the distributions from real human demonstrations. A case study for the ramp-merging driving scenario is provided. The quantitative results show that the proposed approach can accurately predict both the discrete driving decisions such as yield or pass as well as the continuous trajectories.
Courteous Autonomous Cars
Aug 16, 2018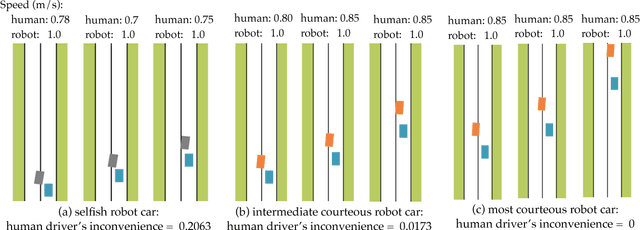
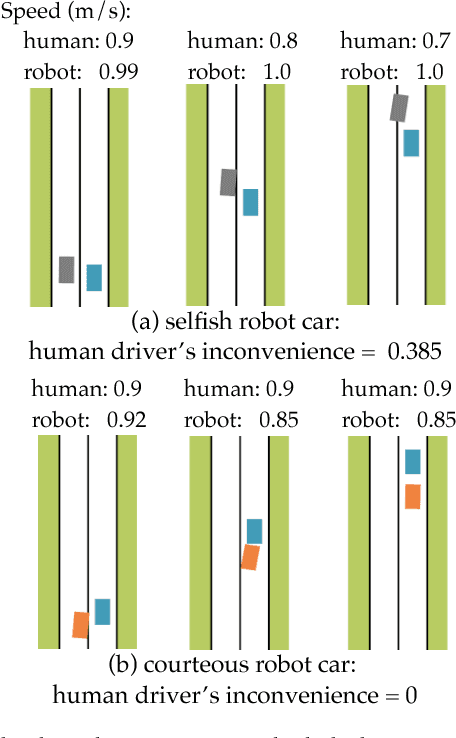
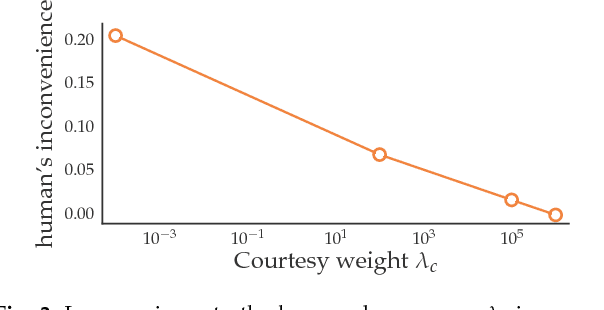
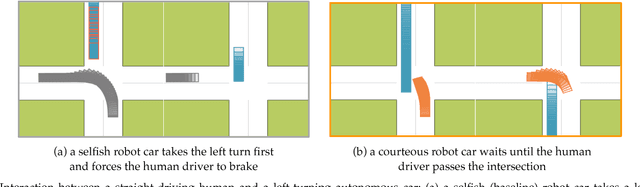
Typically, autonomous cars optimize for a combination of safety, efficiency, and driving quality. But as we get better at this optimization, we start seeing behavior go from too conservative to too aggressive. The car's behavior exposes the incentives we provide in its cost function. In this work, we argue for cars that are not optimizing a purely selfish cost, but also try to be courteous to other interactive drivers. We formalize courtesy as a term in the objective that measures the increase in another driver's cost induced by the autonomous car's behavior. Such a courtesy term enables the robot car to be aware of possible irrationality of the human behavior, and plan accordingly. We analyze the effect of courtesy in a variety of scenarios. We find, for example, that courteous robot cars leave more space when merging in front of a human driver. Moreover, we find that such a courtesy term can help explain real human driver behavior on the NGSIM dataset.
A Fast Integrated Planning and Control Framework for Autonomous Driving via Imitation Learning
Jul 09, 2017



For safe and efficient planning and control in autonomous driving, we need a driving policy which can achieve desirable driving quality in long-term horizon with guaranteed safety and feasibility. Optimization-based approaches, such as Model Predictive Control (MPC), can provide such optimal policies, but their computational complexity is generally unacceptable for real-time implementation. To address this problem, we propose a fast integrated planning and control framework that combines learning- and optimization-based approaches in a two-layer hierarchical structure. The first layer, defined as the "policy layer", is established by a neural network which learns the long-term optimal driving policy generated by MPC. The second layer, called the "execution layer", is a short-term optimization-based controller that tracks the reference trajecotries given by the "policy layer" with guaranteed short-term safety and feasibility. Moreover, with efficient and highly-representative features, a small-size neural network is sufficient in the "policy layer" to handle many complicated driving scenarios. This renders online imitation learning with Dataset Aggregation (DAgger) so that the performance of the "policy layer" can be improved rapidly and continuously online. Several exampled driving scenarios are demonstrated to verify the effectiveness and efficiency of the proposed framework.