 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoundary-Aware Value Function Generation for Safe Stochastic Motion Planning
Mar 22, 2024



Navigation safety is critical for many autonomous systems such as self-driving vehicles in an urban environment. It requires an explicit consideration of boundary constraints that describe the borders of any infeasible, non-navigable, or unsafe regions. We propose a principled boundary-aware safe stochastic planning framework with promising results. Our method generates a value function that can strictly distinguish the state values between free (safe) and non-navigable (boundary) spaces in the continuous state, naturally leading to a safe boundary-aware policy. At the core of our solution lies a seamless integration of finite elements and kernel-based functions, where the finite elements allow us to characterize safety-critical states' borders accurately, and the kernel-based function speeds up computation for the non-safety-critical states. The proposed method was evaluated through extensive simulations and demonstrated safe navigation behaviors in mobile navigation tasks. Additionally, we demonstrate that our approach can maneuver safely and efficiently in cluttered real-world environments using a ground vehicle with strong external disturbances, such as navigating on a slippery floor and against external human intervention.
Analysis and Perspectives on the ANA Avatar XPRIZE Competition
Jan 10, 2024



The ANA Avatar XPRIZE was a four-year competition to develop a robotic "avatar" system to allow a human operator to sense, communicate, and act in a remote environment as though physically present. The competition featured a unique requirement that judges would operate the avatars after less than one hour of training on the human-machine interfaces, and avatar systems were judged on both objective and subjective scoring metrics. This paper presents a unified summary and analysis of the competition from technical, judging, and organizational perspectives. We study the use of telerobotics technologies and innovations pursued by the competing teams in their avatar systems, and correlate the use of these technologies with judges' task performance and subjective survey ratings. It also summarizes perspectives from team leads, judges, and organizers about the competition's execution and impact to inform the future development of telerobotics and telepresence.
Integrating Open-World Shared Control in Immersive Avatars
Jan 05, 2024



Teleoperated avatar robots allow people to transport their manipulation skills to environments that may be difficult or dangerous to work in. Current systems are able to give operators direct control of many components of the robot to immerse them in the remote environment, but operators still struggle to complete tasks as competently as they could in person. We present a framework for incorporating open-world shared control into avatar robots to combine the benefits of direct and shared control. This framework preserves the fluency of our avatar interface by minimizing obstructions to the operator's view and using the same interface for direct, shared, and fully autonomous control. In a human subjects study (N=19), we find that operators using this framework complete a range of tasks significantly more quickly and reliably than those that do not.
Learning and Autonomy for Extraterrestrial Terrain Sampling: An Experience Report from OWLAT Deployment
Dec 04, 2023Extraterrestrial autonomous lander missions increasingly demand adaptive capabilities to handle the unpredictable and diverse nature of the terrain. This paper discusses the deployment of a Deep Meta-Learning with Controlled Deployment Gaps (CoDeGa) trained model for terrain scooping tasks in Ocean Worlds Lander Autonomy Testbed (OWLAT) at NASA Jet Propulsion Laboratory. The CoDeGa-powered scooping strategy is designed to adapt to novel terrains, selecting scooping actions based on the available RGB-D image data and limited experience. The paper presents our experiences with transferring the scooping framework with CoDeGa-trained model from a low-fidelity testbed to the high-fidelity OWLAT testbed. Additionally, it validates the method's performance in novel, realistic environments, and shares the lessons learned from deploying learning-based autonomy algorithms for space exploration. Experimental results from OWLAT substantiate the efficacy of CoDeGa in rapidly adapting to unfamiliar terrains and effectively making autonomous decisions under considerable domain shifts, thereby endorsing its potential utility in future extraterrestrial missions.
On the Overconfidence Problem in Semantic 3D Mapping
Nov 16, 2023Semantic 3D mapping, the process of fusing depth and image segmentation information between multiple views to build 3D maps annotated with object classes in real-time, is a recent topic of interest. This paper highlights the fusion overconfidence problem, in which conventional mapping methods assign high confidence to the entire map even when they are incorrect, leading to miscalibrated outputs. Several methods to improve uncertainty calibration at different stages in the fusion pipeline are presented and compared on the ScanNet dataset. We show that the most widely used Bayesian fusion strategy is among the worst calibrated, and propose a learned pipeline that combines fusion and calibration, GLFS, which achieves simultaneously higher accuracy and 3D map calibration while retaining real-time capability. We further illustrate the importance of map calibration on a downstream task by showing that incorporating proper semantic fusion on a modular ObjectNav agent improves its success rates. Our code will be provided on Github for reproducibility upon acceptance.
3D Force and Contact Estimation for a Soft-Bubble Visuotactile Sensor Using FEM
Oct 17, 2023



Soft-bubble tactile sensors have the potential to capture dense contact and force information across a large contact surface. However, it is difficult to extract contact forces directly from observing the bubble surface because local contacts change the global surface shape significantly due to membrane mechanics and air pressure. This paper presents a model-based method of reconstructing dense contact forces from the bubble sensor's internal RGBD camera and air pressure sensor. We present a finite element model of the force response of the bubble sensor that uses a linear plane stress approximation that only requires calibrating 3 variables. Our method is shown to reconstruct normal and shear forces significantly more accurately than the state-of-the-art, with comparable accuracy for detecting the contact patch, and with very little calibration data.
Simultaneous Trajectory Optimization and Contact Selection for Multi-Modal Manipulation Planning
Jun 10, 2023Complex dexterous manipulations require switching between prehensile and non-prehensile grasps, and sliding and pivoting the object against the environment. This paper presents a manipulation planner that is able to reason about diverse changes of contacts to discover such plans. It implements a hybrid approach that performs contact-implicit trajectory optimization for pivoting and sliding manipulation primitives and sampling-based planning to change between manipulation primitives and target object poses. The optimization method, simultaneous trajectory optimization and contact selection (STOCS), introduces an infinite programming framework to dynamically select from contact points and support forces between the object and environment during a manipulation primitive. To sequence manipulation primitives, a sampling-based tree-growing planner uses STOCS to construct a manipulation tree. We show that by using a powerful trajectory optimizer, the proposed planner can discover multi-modal manipulation trajectories involving grasping, sliding, and pivoting within a few dozen samples. The resulting trajectories are verified to enable a 6 DoF manipulator to manipulate physical objects successfully.
Few-shot Adaptation for Manipulating Granular Materials Under Domain Shift
Mar 06, 2023



Autonomous lander missions on extraterrestrial bodies will need to sample granular material while coping with domain shift, no matter how well a sampling strategy is tuned on Earth. This paper proposes an adaptive scooping strategy that uses deep Gaussian process method trained with meta-learning to learn on-line from very limited experience on the target terrains. It introduces a novel meta-training approach, Deep Meta-Learning with Controlled Deployment Gaps (CoDeGa), that explicitly trains the deep kernel to predict scooping volume robustly under large domain shifts. Employed in a Bayesian Optimization sequential decision-making framework, the proposed method allows the robot to use vision and very little on-line experience to achieve high-quality scooping actions on out-of-distribution terrains, significantly outperforming non-adaptive methods proposed in the excavation literature as well as other state-of-the-art meta-learning methods. Moreover, a dataset of 6,700 executed scoops collected on a diverse set of materials, terrain topography, and compositions is made available for future research in granular material manipulation and meta-learning.
Attentiveness Map Estimation for Haptic Teleoperation of Mobile Robot Obstacle Avoidance and Approach
Dec 16, 2022Haptic feedback can improve safety of teleoperated robots when situational awareness is limited or operators are inattentive. Standard potential field approaches increase haptic resistance as an obstacle is approached, which is desirable when the operator is unaware of the obstacle but undesirable when the movement is intentional, such as when the operator wishes to inspect or manipulate an object. This paper presents a novel haptic teleoperation framework that estimates the operator's attentiveness to dampen haptic feedback for intentional movement. A biologically-inspired attention model is developed based on computational working memory theories to integrate visual saliency estimation with spatial mapping. This model generates an attentiveness map in real-time, and the haptic rendering system generates lower haptic forces for obstacles that the operator is estimated to be aware of. Experimental results in simulation show that the proposed framework outperforms haptic teleoperation without attentiveness estimation in terms of task performance, robot safety, and user experience.
On-Device CPU Scheduling for Sense-React Systems
Aug 14, 2022
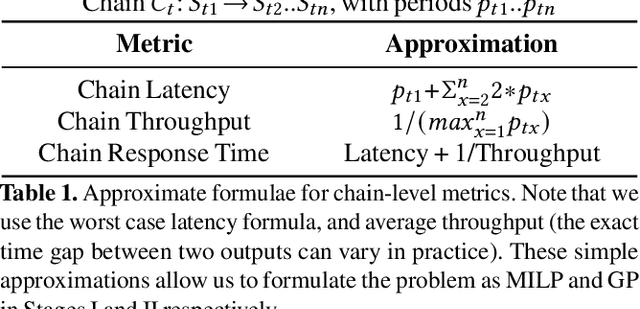
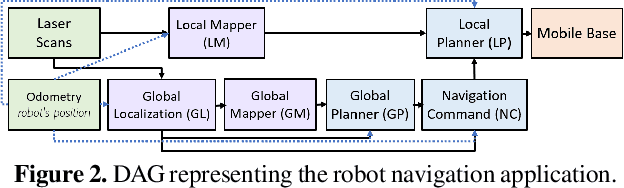
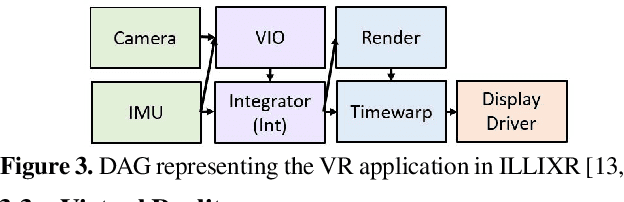
Sense-react systems (e.g. robotics and AR/VR) have to take highly responsive real-time actions, driven by complex decisions involving a pipeline of sensing, perception, planning, and reaction tasks. These tasks must be scheduled on resource-constrained devices such that the performance goals and the requirements of the application are met. This is a difficult scheduling problem that requires handling multiple scheduling dimensions, and variations in resource usage and availability. In practice, system designers manually tune parameters for their specific hardware and application, which results in poor generalization and increases the development burden. In this work, we highlight the emerging need for scheduling CPU resources at runtime in sense-react systems. We study three canonical applications (face tracking, robot navigation, and VR) to first understand the key scheduling requirements for such systems. Armed with this understanding, we develop a scheduling framework, Catan, that dynamically schedules compute resources across different components of an app so as to meet the specified application requirements. Through experiments with a prototype implemented on a widely-used robotics framework (ROS) and an open-source AR/VR platform, we show the impact of system scheduling on meeting the performance goals for the three applications, how Catan is able to achieve better application performance than hand-tuned configurations, and how it dynamically adapts to runtime variations.