 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARISTO Hand: Sensing-Driven Distal Hyperextension for Fine-Grained Manipulation
May 28, 2026Manipulating thin objects requires precise contact geometry and reliable force perception, yet many anthropomorphic robotic hands lack the mechanical and sensing capabilities needed for such interactions. We present the ARISTO Hand, a tendon-driven robotic hand that integrates active distal hyperextension with a hybrid fingertip-sensing architecture that combines a rigid, nail-mounted force-torque sensor and a soft capacitive tactile array. Active hyperextension enables controlled fingertip engagement beyond the kinematic limits of standard flexion, increasing pull-out force by 2.76x for object thicknesses of 1-20 mm while preserving the nominal grasp capability. The rigid nail-mounted sensor provides reliable force measurements during edge contacts, where the sensitivity of proprioceptive force estimation degrades as the contact geometry approaches kinematic singularities. We validate the proposed architecture through quantitative force characterization and a multi-stage SD card extraction and insertion task. Video and supplementary materials are available at: https://aristohand.github.io
PLATO Hand: Shaping Contact Behavior with Fingernails for Precise Manipulation
Feb 05, 2026We present the PLATO Hand, a dexterous robotic hand with a hybrid fingertip that embeds a rigid fingernail within a compliant pulp. This design shapes contact behavior to enable diverse interaction modes across a range of object geometries. We develop a strain-energy-based bending-indentation model to guide the fingertip design and to explain how guided contact preserves local indentation while suppressing global bending. Experimental results show that the proposed robotic hand design demonstrates improved pinching stability, enhanced force observability, and successful execution of edge-sensitive manipulation tasks, including paper singulation, card picking, and orange peeling. Together, these results show that coupling structured contact geometry with a force-motion transparent mechanism provides a principled, physically embodied approach to precise manipulation.
Strategic Jenga Play via Graph Based Dynamics Modeling
May 14, 2025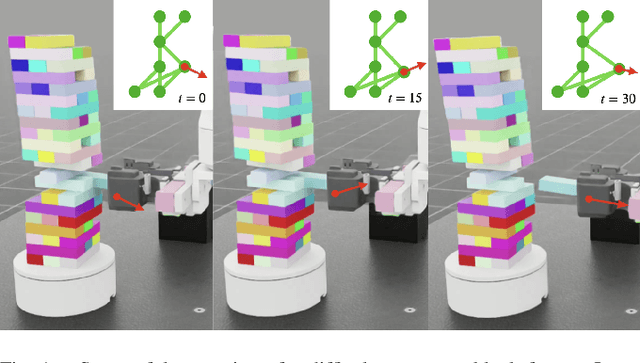
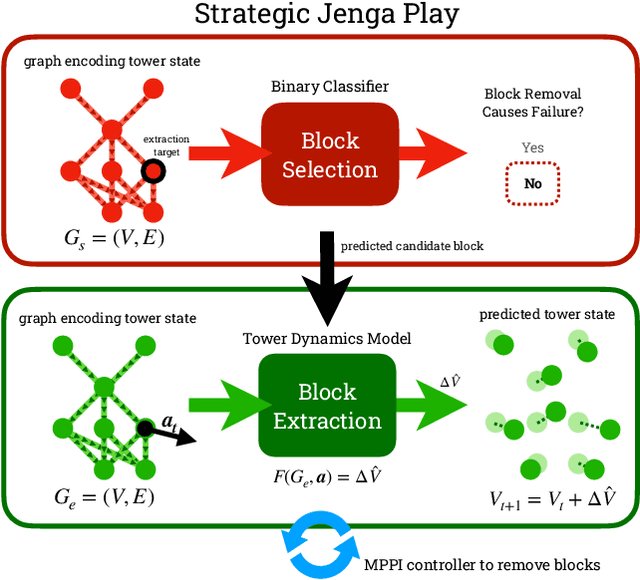
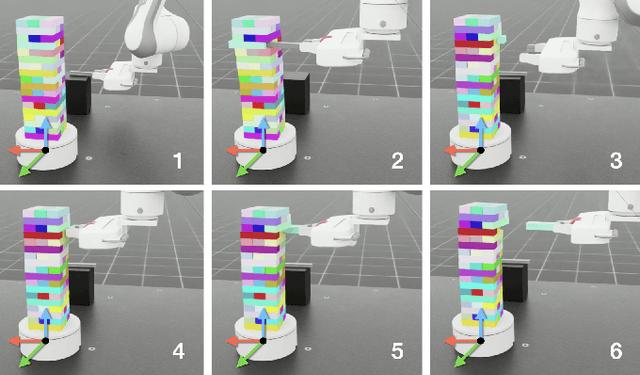
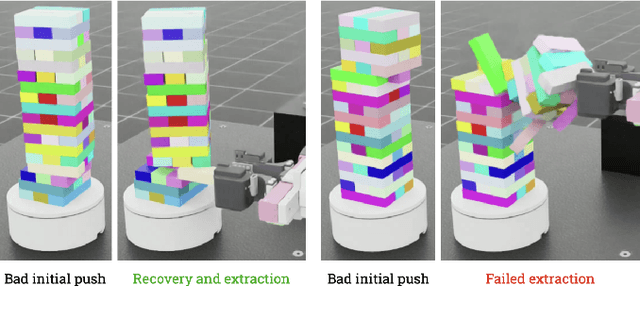
Controlled manipulation of multiple objects whose dynamics are closely linked is a challenging problem within contact-rich manipulation, requiring an understanding of how the movement of one will impact the others. Using the Jenga game as a testbed to explore this problem, we graph-based modeling to tackle two different aspects of the task: 1) block selection and 2) block extraction. For block selection, we construct graphs of the Jenga tower and attempt to classify, based on the tower's structure, whether removing a given block will cause the tower to collapse. For block extraction, we train a dynamics model that predicts how all the blocks in the tower will move at each timestep in an extraction trajectory, which we then use in a sampling-based model predictive control loop to safely pull blocks out of the tower with a general-purpose parallel-jaw gripper. We train and evaluate our methods in simulation, demonstrating promising results towards block selection and block extraction on a challenging set of full-sized Jenga towers, even at advanced stages of the game.