 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePortable Active Learning for Object Detection
May 11, 2026Annotating bounding boxes is costly and limits the scalability of object detection. This challenge is compounded by the need to preserve high accuracy while minimizing manual effort in real-world applications. Prior active learning methods often depend on model features or modify detector internals and training schedules, increasing integration overhead. Moreover, they rarely jointly exploit the benefits of image-level signals, class-imbalance cues, and instance-level uncertainty for comprehensive selection. We present Portable Active Learning (PAL), a detector-agnostic, easily portable framework that operates solely on inference outputs. PAL combines class-wise instance uncertainty with image-level diversity to guide data selection. At each round, PAL trains lightweight class-specific logistic classifiers to distinguish true from false positives, producing entropy-based uncertainty scores for proposals. Candidate images are then refined using global image entropy, class diversity, and image similarity, yielding batches that are both informative and diverse. PAL requires no changes to model internals or training pipelines, ensuring broad compatibility across detectors. Extensive experiments on COCO, PASCAL VOC, and BDD100K demonstrate that PAL consistently improves label efficiency and detection accuracy compared to existing active learning baselines, making it a practical solution for scalable and cost-effective deployment of object detection in real-world settings.
Decoding BACnet Packets: A Large Language Model Approach for Packet Interpretation
Jul 22, 2024



The Industrial Control System (ICS) environment encompasses a wide range of intricate communication protocols, posing substantial challenges for Security Operations Center (SOC) analysts tasked with monitoring, interpreting, and addressing network activities and security incidents. Conventional monitoring tools and techniques often struggle to provide a clear understanding of the nature and intent of ICS-specific communications. To enhance comprehension, we propose a software solution powered by a Large Language Model (LLM). This solution currently focused on BACnet protocol, processes a packet file data and extracts context by using a mapping database, and contemporary context retrieval methods for Retrieval Augmented Generation (RAG). The processed packet information, combined with the extracted context, serves as input to the LLM, which generates a concise packet file summary for the user. The software delivers a clear, coherent, and easily understandable summary of network activities, enabling SOC analysts to better assess the current state of the control system.
Intention-Net: Integrating Planning and Deep Learning for Goal-Directed Autonomous Navigation
Oct 17, 2017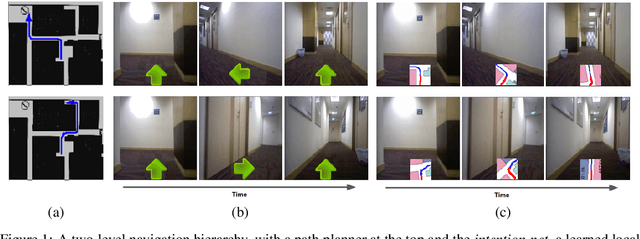

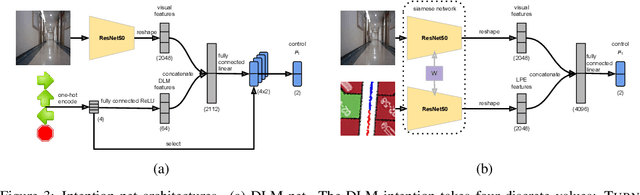
How can a delivery robot navigate reliably to a destination in a new office building, with minimal prior information? To tackle this challenge, this paper introduces a two-level hierarchical approach, which integrates model-free deep learning and model-based path planning. At the low level, a neural-network motion controller, called the intention-net, is trained end-to-end to provide robust local navigation. The intention-net maps images from a single monocular camera and "intentions" directly to robot controls. At the high level, a path planner uses a crude map, e.g., a 2-D floor plan, to compute a path from the robot's current location to the goal. The planned path provides intentions to the intention-net. Preliminary experiments suggest that the learned motion controller is robust against perceptual uncertainty and by integrating with a path planner, it generalizes effectively to new environments and goals.