 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl and Evaluation of a Humanoid Robot with Rolling Contact Knees
Oct 03, 2022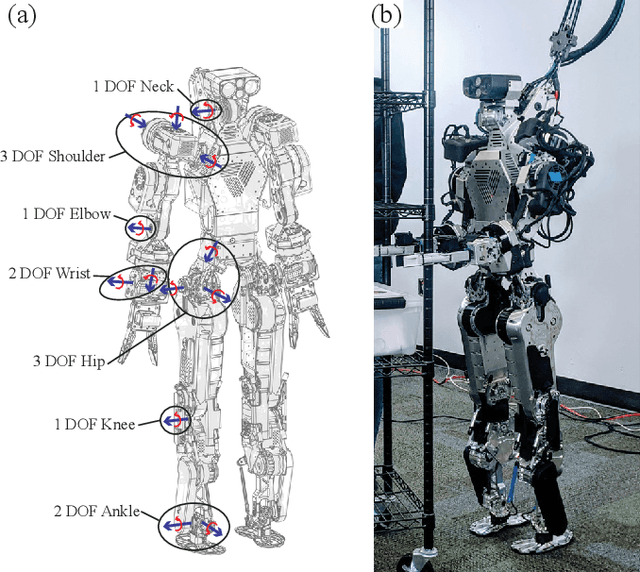
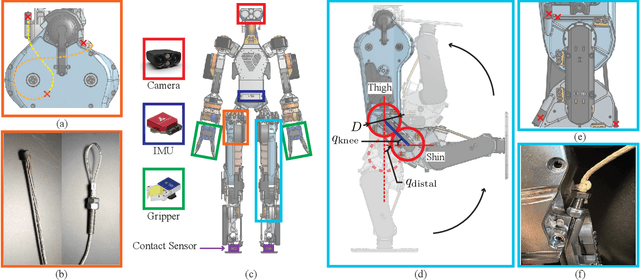

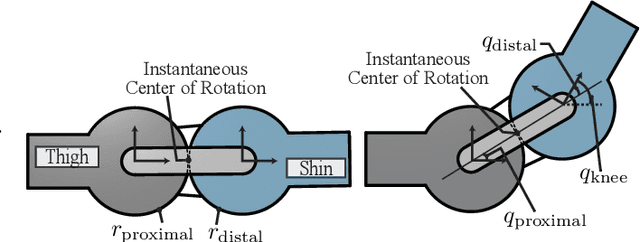
In this paper, we introduce the humanoid robot DRACO 3 by providing a high-level description of its design and control. This robot features proximal actuation and mechanical artifacts to provide a high range of hip, knee and ankle motion. Its versatile design brings interesting problems as it requires a more elaborate control system to perform its motions. For this reason, we introduce a whole body controller (WBC) with support for rolling contact joints and show how it can be easily integrated into our previously presented open-source Planning and Control (PnC) framework. We then validate our controller experimentally on DRACO 3 by showing preliminary results carrying out two postural tasks. Lastly, we analyze the impact of the proximal actuation design and show where it stands in comparison to other adult-size humanoids.
Data-Driven Safety Verification for Legged Robots
Feb 24, 2022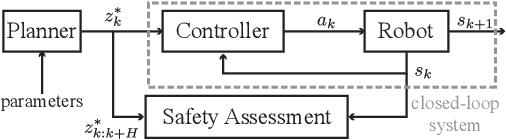
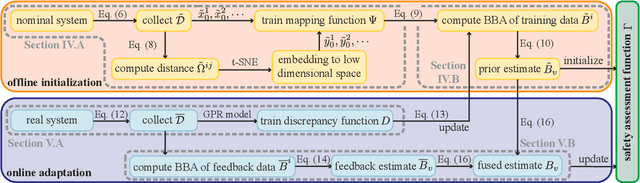
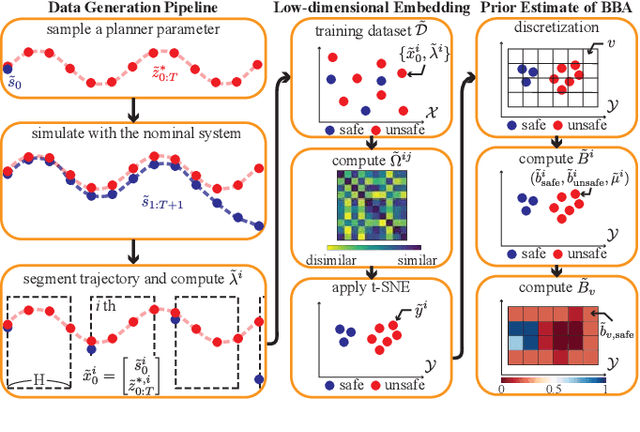
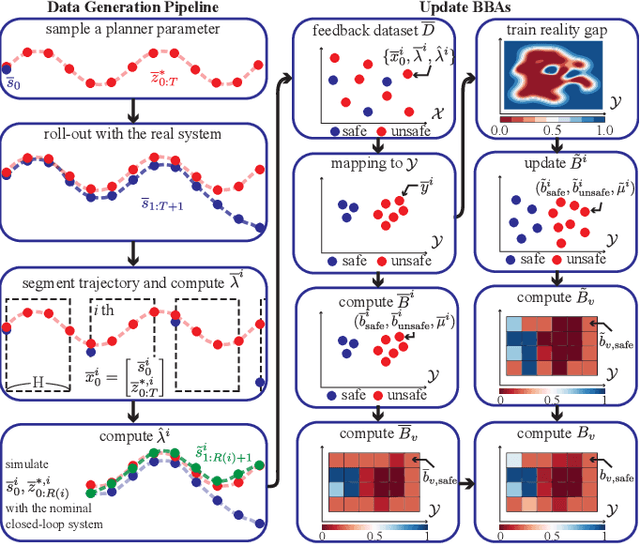
Planning safe motions for legged robots requires sophisticated safety verification tools. However, designing such tools for such complex systems is challenging due to the nonlinear and high-dimensional nature of these systems' dynamics. In this letter, we present a probabilistic verification framework for legged systems, which evaluates the safety of planned trajectories by learning an assessment function from trajectories collected from a closed-loop system. Our approach does not require an analytic expression of the closed-loop dynamics, thus enabling safety verification of systems with complex models and controllers. Our framework consists of an offline stage that initializes a safety assessment function by simulating a nominal model and an online stage that adapts the function to address the sim-to-real gap. The performance of the proposed approach for safety verification is demonstrated using a quadruped balancing task and a humanoid reaching task. The results demonstrate that our framework accurately predicts the systems' safety both at the planning phase to generate robust trajectories and at execution phase to detect unexpected external disturbances.
Nested Mixture of Experts: Cooperative and Competitive Learning of Hybrid Dynamical System
Nov 20, 2020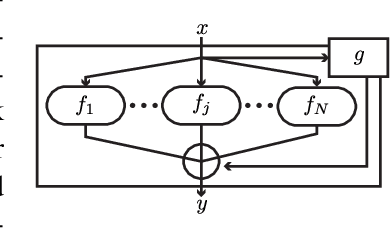
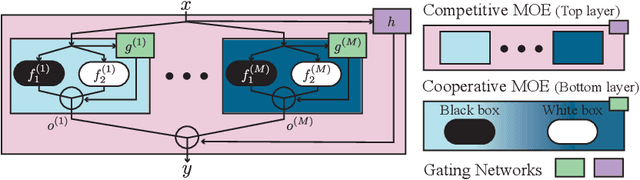


Model-based reinforcement learning (MBRL) algorithms can attain significant sample efficiency but require an appropriate network structure to represent system dynamics. Current approaches include white-box modeling using analytic parameterizations and black-box modeling using deep neural networks. However, both can suffer from a bias-variance trade-off in the learning process, and neither provides a structured method for injecting domain knowledge into the network. As an alternative, gray-box modeling leverages prior knowledge in neural network training but only for simple systems. In this paper, we devise a nested mixture of experts (NMOE) for representing and learning hybrid dynamical systems. An NMOE combines both white-box and black-box models while optimizing bias-variance trade-off. Moreover, an NMOE provides a structured method for incorporating various types of prior knowledge by training the associative experts cooperatively or competitively. The prior knowledge includes information on robots' physical contacts with the environments as well as their kinematic and dynamic properties. In this paper, we demonstrate how to incorporate prior knowledge into our NMOE in various continuous control domains, including hybrid dynamical systems. We also show the effectiveness of our method in terms of data-efficiency, generalization to unseen data, and bias-variance trade-off. Finally, we evaluate our NMOE using an MBRL setup, where the model is integrated with a model-based controller and trained online.
Data Efficient and Safe Learning for Locomotion via Simplified Model
Jun 10, 2019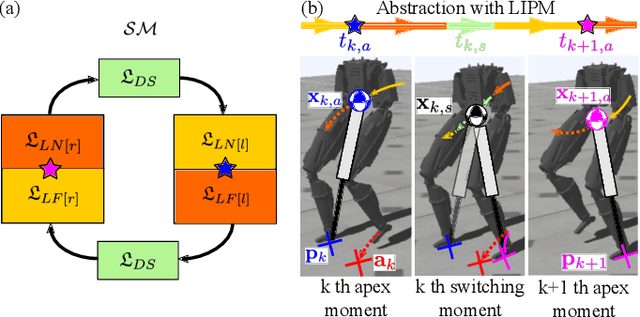
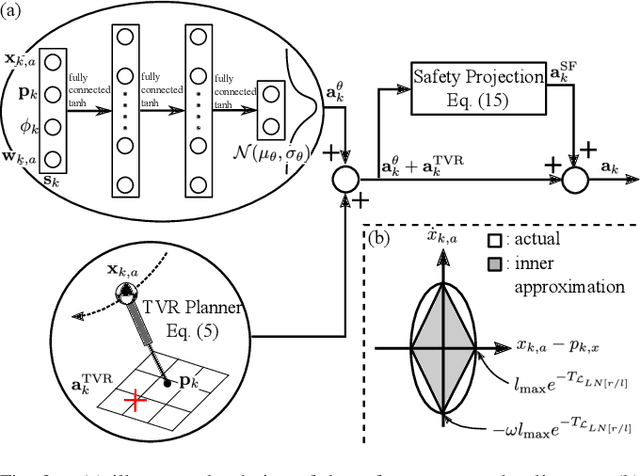
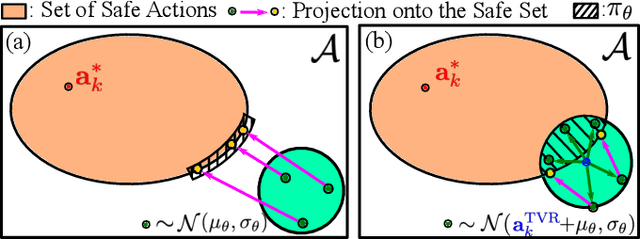
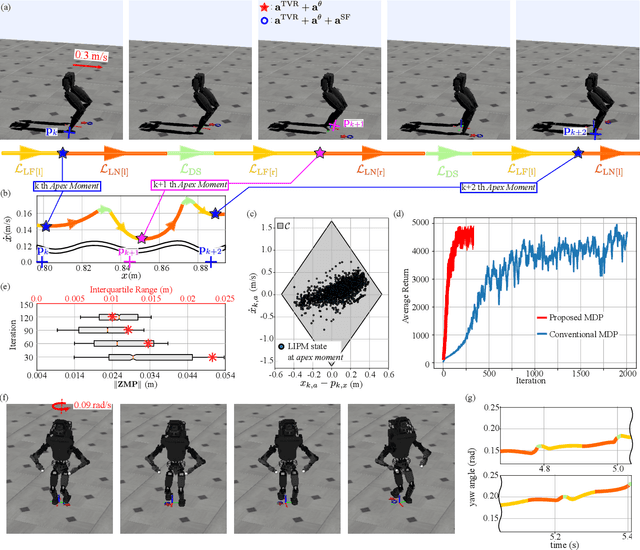
In this letter, we formulate a novel Markov Decision Process (MDP) for data efficient and safe learning for locomotion via a simplified model. In our previous studies on biped locomotion, we relied on a low-dimensional robot model, e.g., the Linear Inverted Pendulum Model (LIPM), commonly used in Walking Pattern Generators (WPG). However, employing low-level control cannot precisely track desired footstep locations due to the discrepancies between the real system and the simplified model. In this work, we propose an approach for mitigating this problem by complementing model-based policies with machine learning. We formulate an MDP process incorporating dynamic properties of robots, desired walking directions, and footstep features. We iteratively update the policy to determine footstep locations based on the previous MDP process aided by a deep reinforcement learning process. The policy of the proposed approach consists of a WPG and a parameterized stochastic policy. In addition, a Control Barrier Function (CBF) process applies corrections the above policy to prevent exploration of unsafe regions during learning. Our contributions include: 1) reduction of footstep tracking errors resulting from employing LIPM; 2) efficient exploration of the data driven process, and; 3) scalability of the procedure to any humanoid robot.
Control of A High Performance Bipedal Robot using Viscoelastic Liquid Cooled Actuators
Jun 10, 2019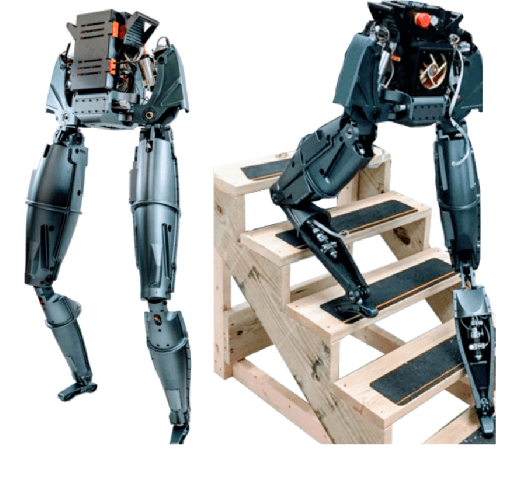
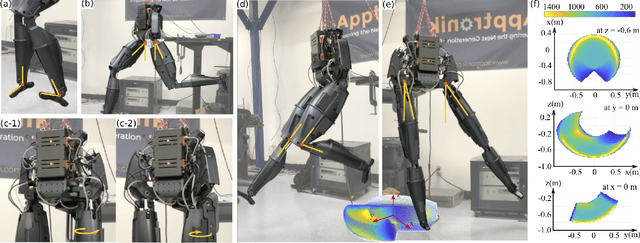
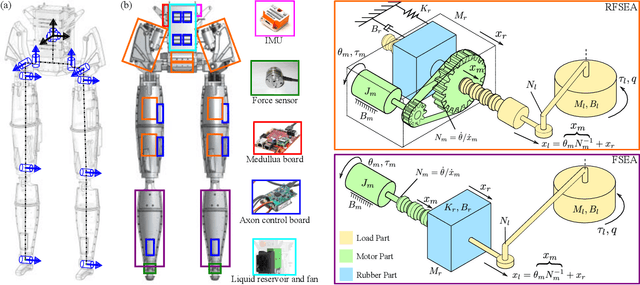
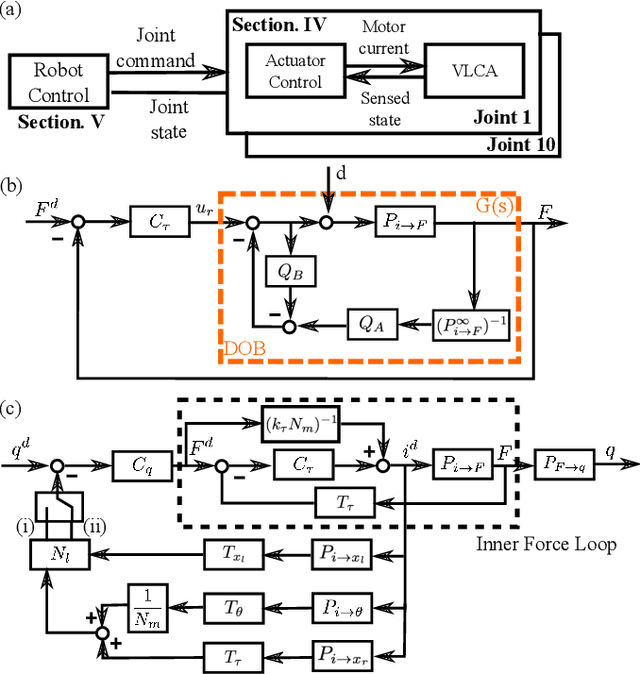
This paper describes the control, and evaluation of a new human-scaled biped robot with liquid cooled viscoelastic actuators (VLCA). Based on the lessons learned from previous work from our team on VLCA [1], we present a new system design embodying a Reaction Force Sensing Series Elastic Actuator (RFSEA) and a Force Sensing Series Elastic Actuator (FSEA). These designs are aimed at reducing the size and weight of the robot's actuation system while inheriting the advantages of our designs such as energy efficiency, torque density, impact resistance and position/force controllability. The system design takes into consideration human-inspired kinematics and range-of-motion (ROM), while relying on foot placement to balance. In terms of actuator control, we perform a stability analysis on a Disturbance Observer (DOB) designed for force control. We then evaluate various position control algorithms both in the time and frequency domains for our VLCA actuators. Having the low level baseline established, we first perform a controller evaluation on the legs using Operational Space Control (OSC) [2]. Finally, we move on to evaluating the full bipedal robot by accomplishing unsupported dynamic walking by means of the algorithms to appear in [3].
Fast Kinodynamic Bipedal Locomotion Planning with Moving Obstacles
Jul 09, 2018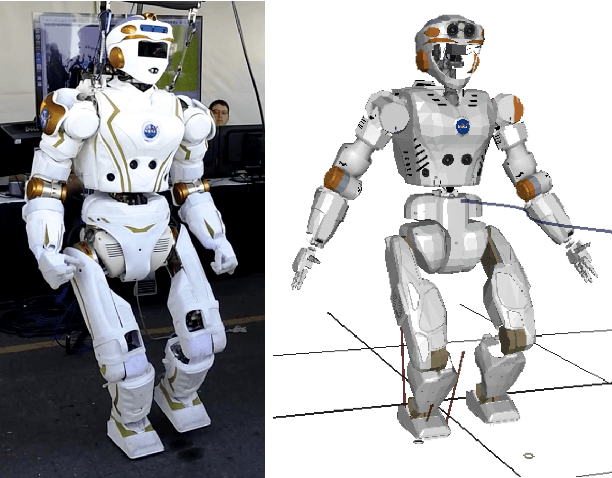
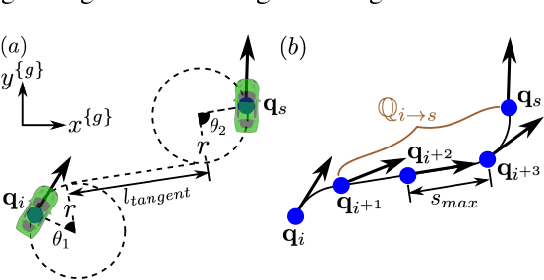
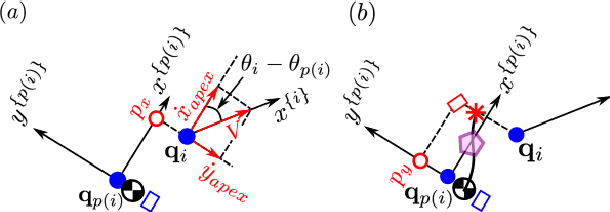
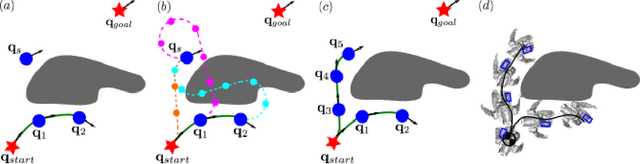
We present a sampling-based kinodynamic planning framework for a bipedal robot in complex environments. Unlike other footstep planner which typically plan footstep locations and the biped dynamics in separate steps, we handle both simultaneously. Three advantages of this approach are (1) the ability to differentiate alternate routes while selecting footstep locations based on the temporal duration of the route as determined by the Linear Inverted Pendulum Model dynamics, (2) the ability to perform collision checking through time so that collisions with moving obstacles are prevented without avoiding their entire trajectory, and (3) the ability to specify a minimum forward velocity for the biped. To generate a dynamically consistent description of the walking behavior, we exploit the Phase Space Planner. To plan a collision free route toward the goal, we adapt planning strategies from non-holonomic wheeled robots to gather a sequence of inputs for the PSP. This allows us to efficiently approximate dynamic and kinematic constraints on bipedal motion, to apply a sampling based planning algorithms, and to use the Dubin's path as the steering method to connect two points in the configuration space. The results of the algorithm are sent to a Whole Body Controller to generate full body dynamic walking behavior.
Exploring Model Predictive Control to Generate Optimal Control Policies for HRI Dynamical Systems
Jan 13, 2017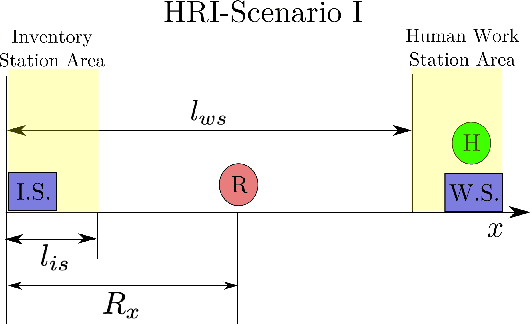
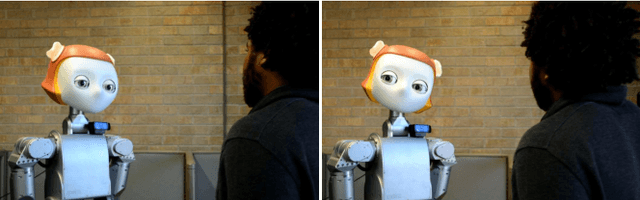
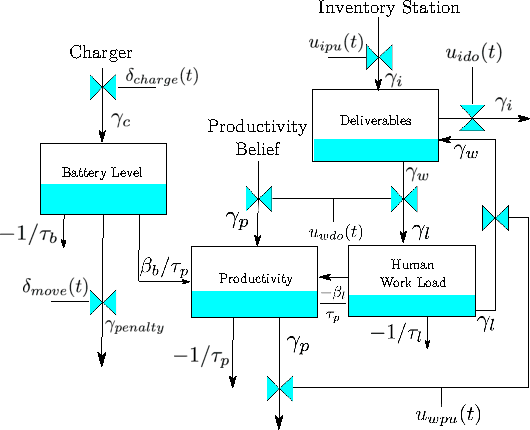
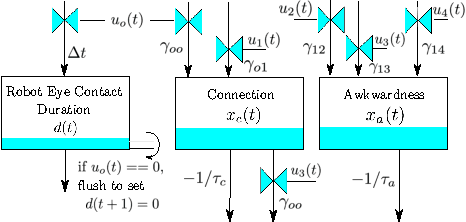
We model Human-Robot-Interaction (HRI) scenarios as linear dynamical systems and use Model Predictive Control (MPC) with mixed integer constraints to generate human-aware control policies. We motivate the approach by presenting two scenarios. The first involves an assistive robot that aims to maximize productivity while minimizing the human's workload, and the second involves a listening humanoid robot that manages its eye contact behavior to maximize "connection" and minimize social "awkwardness" with the human during the interaction. Our simulation results show that the robot generates useful behaviors as it finds control policies to minimize the specified cost function. Further, we implement the second scenario on a humanoid robot and test the eye contact scenario with 48 human participants to demonstrate and evaluate the desired controller behavior. The humanoid generated 25% more eye contact when it was told to maximize connection over when it was told to maximize awkwardness. However, despite showing the desired behavior, there was no statistical difference between the participant's perceived connection with the humanoid.