 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFundamentals of NOMA in Low-Earth Orbit Coordinated Multi-Satellite Networks
Jun 09, 2026Coordinated multi-satellite (CoMS) transmission and non-orthogonal multiple access (NOMA) are envisioned to jointly enhance coverage, capacity, and spectrum efficiency for satellite networks. Their integration into a unified CoMS-NOMA framework will allow more efficient, reliable, and energy-efficient multi-user access. This paper investigates the downlink performance of CoMS-NOMA networks from a system-level perspective, in which multiple satellites cooperatively serve multiple users via NOMA. Leveraging tools from stochastic geometry, related angles and distances in CoMS-NOMA are first derived as intermediate results. Then, we obtain the combined signal power distributions and analyze coverage and spectrum performance under both inter- and intra-satellite interference, accounting for potential imperfect successive interference cancellation (SIC). The analytical model is validated across a range of system parameters, including the number of satellites, service region angle, error-propagation factor, and power allocation coefficients. Numerical results indicate that increasing the number of cooperative satellites does not always improve coverage and spectrum efficiency. Additionally, while a higher main-lobe gain improves coverage, a near-perfect SIC provides only slightly greater benefits than a reasonably good SIC. With properly selected power allocation coefficients, CoMS-NOMA achieves up to a 270% improvement in coverage and a 56% gain in sum spectral efficiency, compared with conventional orthogonal and single-satellite schemes, indicating potential for green, energy-efficient satellite networking.
Satellite NOMA for Direct-to-Cell Communications: Fundamentals, Protocols, and Opportunities
Jun 01, 2026Direct-to-cell (DTC) satellite communication is regarded as one of the most recent technologies that provides global connectivity. However, with the growing number of wireless users and devices, the design of DTC communications must satisfy the requirements of high-scale capabilities and efficient spectrum utilization. To this end, integrating satellite communications with advanced multiple-access techniques, such as non-orthogonal multiple access (NOMA), has attracted considerable interest in developing NOMA-DTC communications. In this article, we first introduce the fundamentals of NOMA-DTC communications, including architectural fundamentals, system design aspects, and potential applications. Given the various cooperative modes and the still-evolving satellite network (SatNet) architectures, such as cooperative SatNets and multi-tier SatNets, we explore protocols that suit future SatNets and enhance system performance. Furthermore, a case study is conducted to investigate the benefits of NOMA schemes for DTC communications and to compare them with OMA schemes. Finally, to inspire further research, several opportunities for NOMA-DTC communications are presented.
FedAFD: Multimodal Federated Learning via Adversarial Fusion and Distillation
Mar 05, 2026Multimodal Federated Learning (MFL) enables clients with heterogeneous data modalities to collaboratively train models without sharing raw data, offering a privacy-preserving framework that leverages complementary cross-modal information. However, existing methods often overlook personalized client performance and struggle with modality/task discrepancies, as well as model heterogeneity. To address these challenges, we propose FedAFD, a unified MFL framework that enhances client and server learning. On the client side, we introduce a bi-level adversarial alignment strategy to align local and global representations within and across modalities, mitigating modality and task gaps. We further design a granularity-aware fusion module to integrate global knowledge into the personalized features adaptively. On the server side, to handle model heterogeneity, we propose a similarity-guided ensemble distillation mechanism that aggregates client representations on shared public data based on feature similarity and distills the fused knowledge into the global model. Extensive experiments conducted under both IID and non-IID settings demonstrate that FedAFD achieves superior performance and efficiency for both the client and the server.
Gait-Net-augmented Implicit Kino-dynamic MPC for Dynamic Variable-frequency Humanoid Locomotion over Discrete Terrains
Feb 05, 2025



Current optimization-based control techniques for humanoid locomotion struggle to adapt step duration and placement simultaneously in dynamic walking gaits due to their reliance on fixed-time discretization, which limits responsiveness to terrain conditions and results in suboptimal performance in challenging environments. In this work, we propose a Gait-Net-augmented implicit kino-dynamic model-predictive control (MPC) to simultaneously optimize step location, step duration, and contact forces for natural variable-frequency locomotion. The proposed method incorporates a Gait-Net-augmented Sequential Convex MPC algorithm to solve multi-linearly constrained variables by iterative quadratic programs. At its core, a lightweight Gait-frequency Network (Gait-Net) determines the preferred step duration in terms of variable MPC sampling times, simplifying step duration optimization to the parameter level. Additionally, it enhances and updates the spatial reference trajectory within each sequential iteration by incorporating local solutions, allowing the projection of kinematic constraints to the design of reference trajectories. We validate the proposed algorithm in high-fidelity simulations and on small-size humanoid hardware, demonstrating its capability for variable-frequency and 3-D discrete terrain locomotion with only a one-step preview of terrain data.
Spectrum Sharing in 6G Space-Ground Integrated Networks: A Ground Protection Zone-Based Design
Jan 06, 2025Space-ground integrated network (SGIN) has been envisioned as a competitive solution for large scale and wide coverage of future wireless networks. By integrating both the non-terrestrial network (NTN) and the terrestrial network (TN), SGIN can provide high speed and omnipresent wireless network access for the users using the predefined licensed spectrums. Considering the scarcity of the spectrum resource and the low spectrum efficiency of the SGIN, we enable the NTN and TN to share the spectrum to improve overall system performance, i.e., weighted-sum area data rate (WS-ADR). However, mutual interference between NTN and TN is often inevitable and thus causes SGIN performance degradation. In this work, we consider a ground protection zone for the TN base stations, in which the NTN users are only allowed to use the NTN reserved spectrum to mitigate the NTN and TN mutual interference. We analytically derive the coverage probability and area data rate (ADR) of the typical users and study the performance under various protection zone sizes and spectrum allocation parameter settings. Simulation and numerical results demonstrate that the WS-ADR could be maximized by selecting the appropriate radius of protection zone and bandwidth allocation factor in the SGIN.
Adapting Gait Frequency for Posture-regulating Humanoid Push-recovery via Hierarchical Model Predictive Control
Sep 22, 2024Current humanoid push-recovery strategies often use whole-body motion, yet posture regulation is often overlooked. For instance, during manipulation tasks, the upper body may need to stay upright and have minimal recovery displacement. This paper introduces a novel approach to enhancing humanoid push-recovery performance under unknown disturbances and regulating body posture by tailoring the recovery stepping strategy. We propose a hierarchical-MPC-based scheme that analyzes and detects instability in the prediction window and quickly recovers through adapting gait frequency. Our approach integrates a high-level nonlinear MPC, a posture-aware gait frequency adaptation planner, and a low-level convex locomotion MPC. The planners predict the center of mass (CoM) state trajectories that can be assessed for precursors of potential instability and posture deviation. In simulation, we demonstrate improved maximum recoverable impulse by 131% on average compared with baseline approaches. In hardware experiments, a 125 ms advancement in recovery stepping timing/reflex has been observed with the proposed approach, We also demonstrate improved push-recovery performance and minimized attitude change under 0.2 rad.
Dynamic Loco-manipulation on HECTOR: Humanoid for Enhanced ConTrol and Open-source Research
Dec 21, 2023Despite their remarkable advancement in locomotion and manipulation, humanoid robots remain challenged by a lack of synchronized loco-manipulation control, hindering their full dynamic potential. In this work, we introduce a versatile and effective approach to controlling and generalizing dynamic locomotion and loco-manipulation on humanoid robots via a Force-and-moment-based Model Predictive Control (MPC). Specifically, we proposed a simplified rigid body dynamics (SRBD) model to take into account both humanoid and object dynamics for humanoid loco-manipulation. This linear dynamics model allows us to directly solve for ground reaction forces and moments via an MPC problem to achieve highly dynamic real-time control. Our proposed framework is highly versatile and generalizable. We introduce HECTOR (Humanoid for Enhanced ConTrol and Open-source Research) platform to demonstrate its effectiveness in hardware experiments. With the proposed framework, HECTOR can maintain exceptional balance during double-leg stance mode, even when subjected to external force disturbances to the body or foot location. In addition, it can execute 3-D dynamic walking on a variety of uneven terrains, including wet grassy surfaces, slopes, randomly placed wood slats, and stacked wood slats up to 6 cm high with the speed of 0.6 m/s. In addition, we have demonstrated dynamic humanoid loco-manipulation over uneven terrain, carrying 2.5 kg load. HECTOR simulations, along with the proposed control framework, are made available as an open-source project. (https://github.com/DRCL-USC/Hector_Simulation).
Balancing Control and Pose Optimization for Wheel-legged Robots Navigating Uneven Terrains
Sep 21, 2021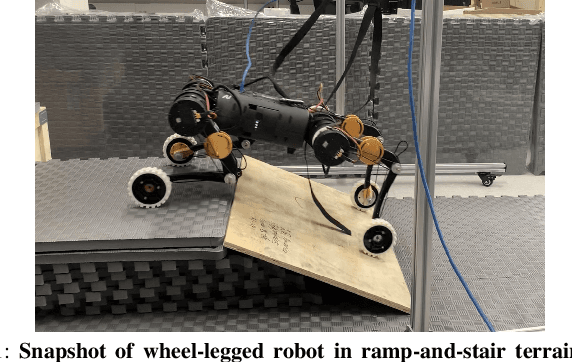
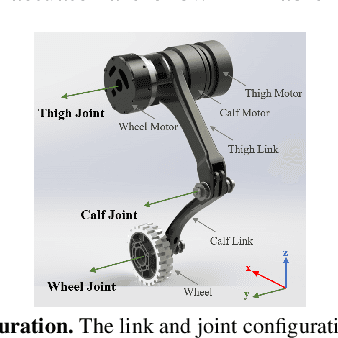
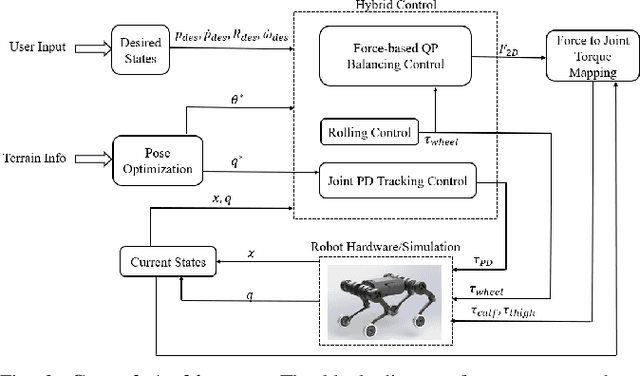
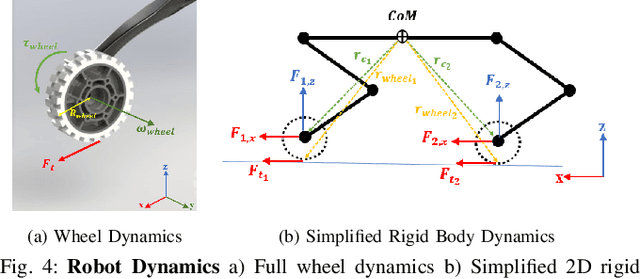
In this paper, we propose a novel approach on controlling wheel-legged quadrupedal robots using pose optimization and force control via quadratic programming (QP). Our method allows the robot to leverage wheel torques to navigate the terrain while keeping the wheel traction and balancing the robot body. In detail, we present a rigid body dynamics with wheels that can be used for real-time balancing control of wheel-legged robots. In addition, we introduce an effective pose optimization method for wheel-legged robot's locomotion over uneven terrains with ramps and stairs. The pose optimization utilized a nonlinear programming (NLP) solver to solve for the optimal poses in terms of joint positions based on kinematic and contact constraints during a stair-climbing task with rolling wheels. In simulation, our approach has successfully validated for the problem of a wheel-legged robot climbing up a 0.34m stair with a slope angle of 80 degrees and shown its versatility in multiple-stair climbing with varied stair runs and rises with wheel traction. Experimental validation on the real robot demonstrated the capability of climbing up on a 0.25m stair with a slope angle of 30 degrees.