 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYUBI: Yielding Universal Bidigital Interface for Bimanual Dexterous Manipulation at Scale
Jun 08, 2026We introduce Yielding Universal Bidigital Interface (YUBI), a finger-aligned gripper designed to enable intuitive, ergonomic, and scalable data collection for bimanual dexterous manipulation. While handheld data collection systems such as Universal Manipulation Interface (UMI) enable affordable data collection, their bulky pistol-grip designs can pose ergonomic and usability challenges for fine-grained, dexterous manipulation tasks. To address this, YUBI presents a distinct design principle: yielding, finger-driven actuation that directly maps human finger movements to gripper jaw motion. Using the YUBI devices, we set up a data collection system with integrated VR-based 6 DoF tracking of the gripper, ensuring high-fidelity trajectory data acquisition. We curate a UMI-based dataset of unprecedented scale: 8,434 hours across 1.20M episodes and 119 tasks. Experiments show that YUBI offers advantages over the UMI gripper in versatility for complex bimanual tasks, dexterity, and operational efficiency. A single policy trained on the YUBI dataset transfers across multiple bimanual robots (UR, Franka, and ELEY) simply by mounting the gripper on each platform, confirming that the collected data are directly executable as policy supervision. We release the gripper hardware, data-collection software, and dataset as one integrated stack, offering the open community a reproducible path to large-scale data acquisition for advancing robotic foundation models.
Collective Intelligence for Object Manipulation with Mobile Robots
Nov 28, 2022



While natural systems often present collective intelligence that allows them to self-organize and adapt to changes, the equivalent is missing in most artificial systems. We explore the possibility of such a system in the context of cooperative object manipulation using mobile robots. Although conventional works demonstrate potential solutions for the problem in restricted settings, they have computational and learning difficulties. More importantly, these systems do not possess the ability to adapt when facing environmental changes. In this work, we show that by distilling a planner derived from a gradient-based soft-body physics simulator into an attention-based neural network, our multi-robot manipulation system can achieve better performance than baselines. In addition, our system also generalizes to unseen configurations during training and is able to adapt toward task completions when external turbulence and environmental changes are applied.
World Robot Challenge 2020 -- Partner Robot: A Data-Driven Approach for Room Tidying with Mobile Manipulator
Jul 22, 2022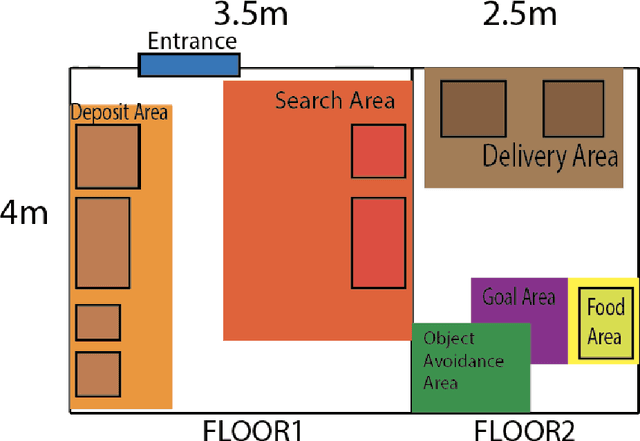
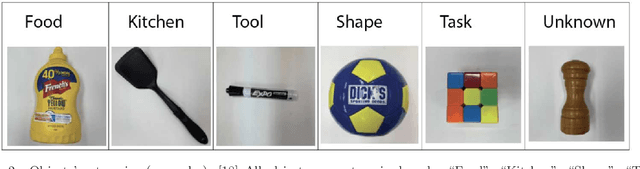
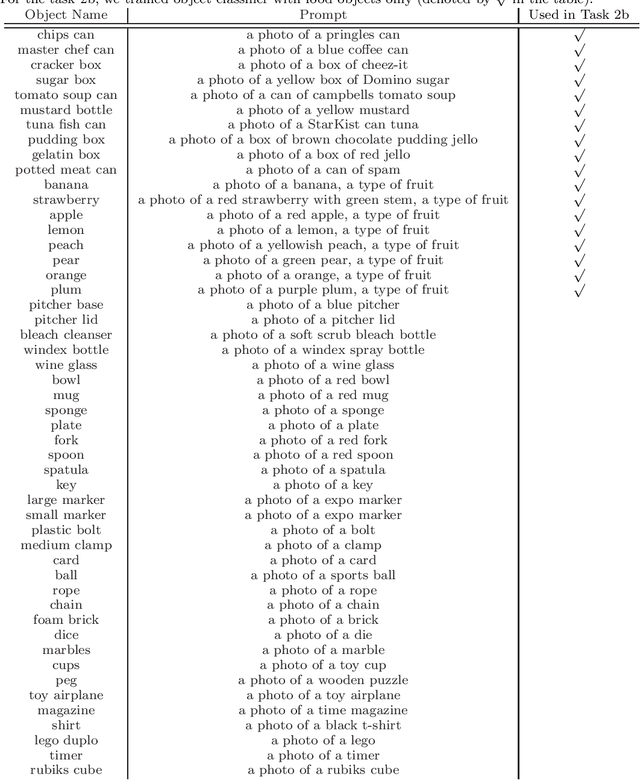
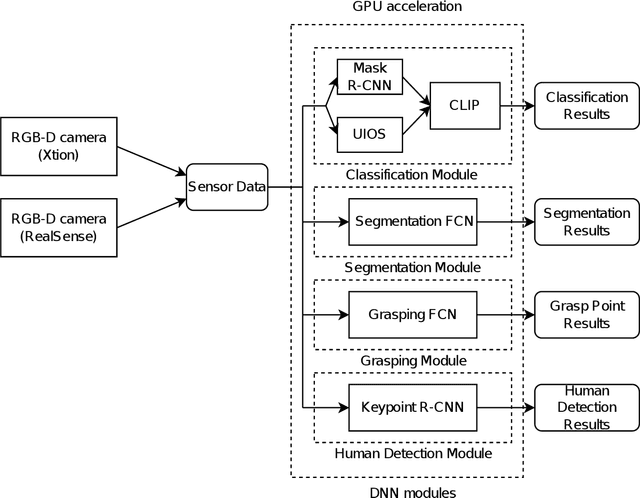
Tidying up a household environment using a mobile manipulator poses various challenges in robotics, such as adaptation to large real-world environmental variations, and safe and robust deployment in the presence of humans.The Partner Robot Challenge in World Robot Challenge (WRC) 2020, a global competition held in September 2021, benchmarked tidying tasks in the real home environments, and importantly, tested for full system performances.For this challenge, we developed an entire household service robot system, which leverages a data-driven approach to adapt to numerous edge cases that occur during the execution, instead of classical manual pre-programmed solutions. In this paper, we describe the core ingredients of the proposed robot system, including visual recognition, object manipulation, and motion planning. Our robot system won the second prize, verifying the effectiveness and potential of data-driven robot systems for mobile manipulation in home environments.