 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-Shot Imitation Learning
Dec 04, 2017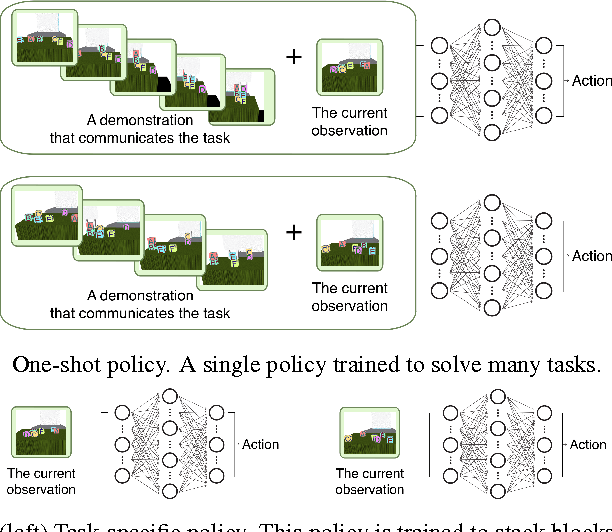
Imitation learning has been commonly applied to solve different tasks in isolation. This usually requires either careful feature engineering, or a significant number of samples. This is far from what we desire: ideally, robots should be able to learn from very few demonstrations of any given task, and instantly generalize to new situations of the same task, without requiring task-specific engineering. In this paper, we propose a meta-learning framework for achieving such capability, which we call one-shot imitation learning. Specifically, we consider the setting where there is a very large set of tasks, and each task has many instantiations. For example, a task could be to stack all blocks on a table into a single tower, another task could be to place all blocks on a table into two-block towers, etc. In each case, different instances of the task would consist of different sets of blocks with different initial states. At training time, our algorithm is presented with pairs of demonstrations for a subset of all tasks. A neural net is trained that takes as input one demonstration and the current state (which initially is the initial state of the other demonstration of the pair), and outputs an action with the goal that the resulting sequence of states and actions matches as closely as possible with the second demonstration. At test time, a demonstration of a single instance of a new task is presented, and the neural net is expected to perform well on new instances of this new task. The use of soft attention allows the model to generalize to conditions and tasks unseen in the training data. We anticipate that by training this model on a much greater variety of tasks and settings, we will obtain a general system that can turn any demonstrations into robust policies that can accomplish an overwhelming variety of tasks. Videos available at https://bit.ly/nips2017-oneshot .
Meta Learning Shared Hierarchies
Oct 26, 2017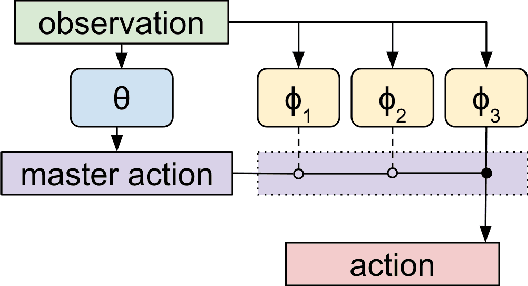
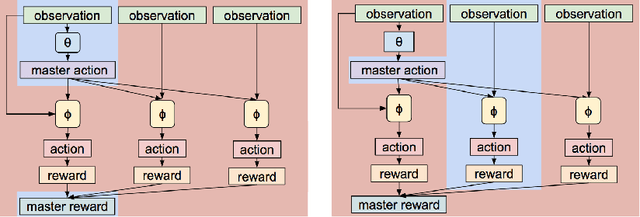
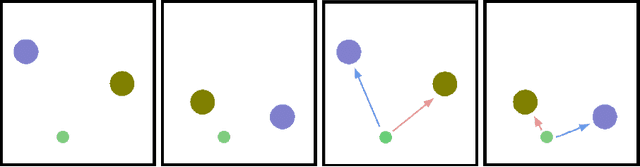
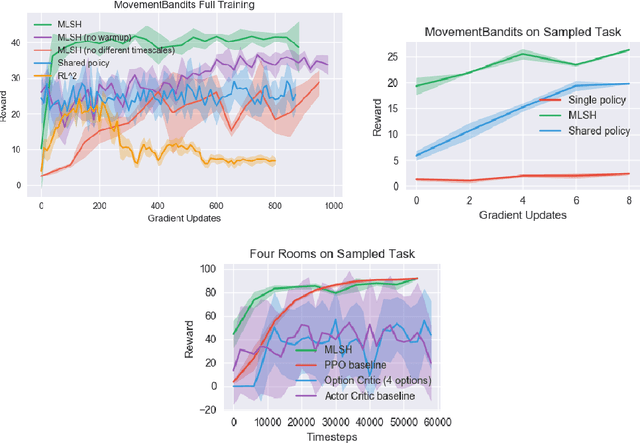
We develop a metalearning approach for learning hierarchically structured policies, improving sample efficiency on unseen tasks through the use of shared primitives---policies that are executed for large numbers of timesteps. Specifically, a set of primitives are shared within a distribution of tasks, and are switched between by task-specific policies. We provide a concrete metric for measuring the strength of such hierarchies, leading to an optimization problem for quickly reaching high reward on unseen tasks. We then present an algorithm to solve this problem end-to-end through the use of any off-the-shelf reinforcement learning method, by repeatedly sampling new tasks and resetting task-specific policies. We successfully discover meaningful motor primitives for the directional movement of four-legged robots, solely by interacting with distributions of mazes. We also demonstrate the transferability of primitives to solve long-timescale sparse-reward obstacle courses, and we enable 3D humanoid robots to robustly walk and crawl with the same policy.
Evolution Strategies as a Scalable Alternative to Reinforcement Learning
Sep 07, 2017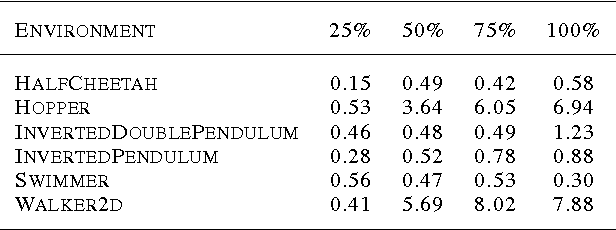
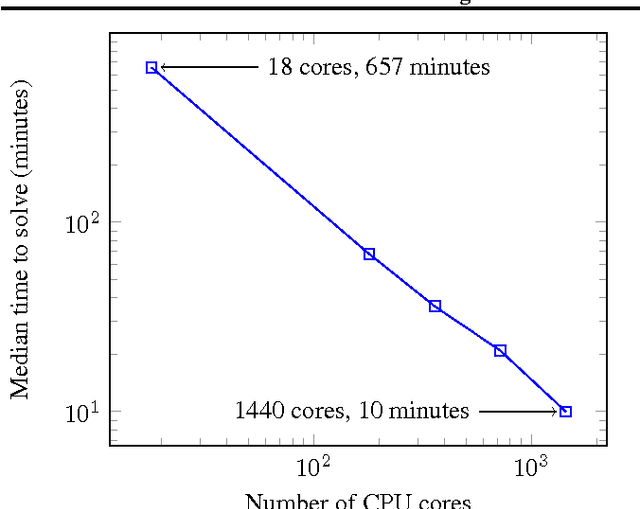
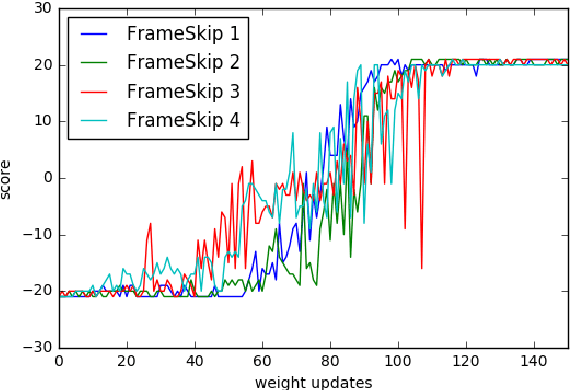
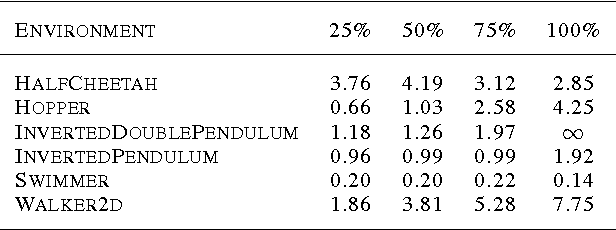
We explore the use of Evolution Strategies (ES), a class of black box optimization algorithms, as an alternative to popular MDP-based RL techniques such as Q-learning and Policy Gradients. Experiments on MuJoCo and Atari show that ES is a viable solution strategy that scales extremely well with the number of CPUs available: By using a novel communication strategy based on common random numbers, our ES implementation only needs to communicate scalars, making it possible to scale to over a thousand parallel workers. This allows us to solve 3D humanoid walking in 10 minutes and obtain competitive results on most Atari games after one hour of training. In addition, we highlight several advantages of ES as a black box optimization technique: it is invariant to action frequency and delayed rewards, tolerant of extremely long horizons, and does not need temporal discounting or value function approximation.
Generative Adversarial Imitation Learning
Jun 10, 2016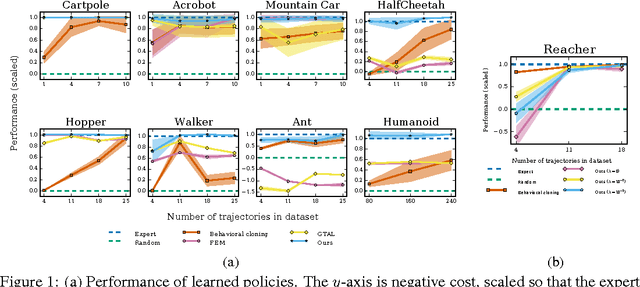
Consider learning a policy from example expert behavior, without interaction with the expert or access to reinforcement signal. One approach is to recover the expert's cost function with inverse reinforcement learning, then extract a policy from that cost function with reinforcement learning. This approach is indirect and can be slow. We propose a new general framework for directly extracting a policy from data, as if it were obtained by reinforcement learning following inverse reinforcement learning. We show that a certain instantiation of our framework draws an analogy between imitation learning and generative adversarial networks, from which we derive a model-free imitation learning algorithm that obtains significant performance gains over existing model-free methods in imitating complex behaviors in large, high-dimensional environments.
Model-Free Imitation Learning with Policy Optimization
May 26, 2016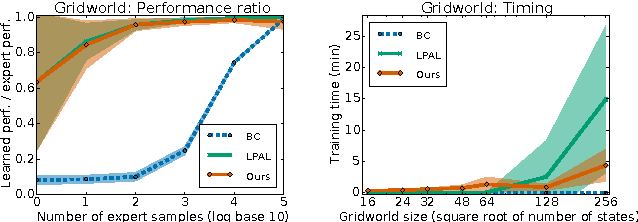
In imitation learning, an agent learns how to behave in an environment with an unknown cost function by mimicking expert demonstrations. Existing imitation learning algorithms typically involve solving a sequence of planning or reinforcement learning problems. Such algorithms are therefore not directly applicable to large, high-dimensional environments, and their performance can significantly degrade if the planning problems are not solved to optimality. Under the apprenticeship learning formalism, we develop alternative model-free algorithms for finding a parameterized stochastic policy that performs at least as well as an expert policy on an unknown cost function, based on sample trajectories from the expert. Our approach, based on policy gradients, scales to large continuous environments with guaranteed convergence to local minima.
* In Proceedings of the 33rd International Conference on Machine Learning, 2016