 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYuvion VL: A Multimodal Foundation Model for Adversarial Content and AI Safety
Jun 23, 2026General-purpose models often struggle to reliably identify and understand real-world multimodal risks, largely due to the inherent multimodal adversarial nature of content and AI safety. We present Yuvion VL, a family of multimodal large language models purpose-built for content and AI safety, with both instruction-tuned and reasoning-oriented variants. Yuvion VL addresses this gap by treating safety as an inherently adversarial and multimodal problem and designing the entire pipeline around adversarial robustness. For data construction, we develop an automated pipeline integrating adversarial-aware data synthesis with multi-stage quality control, producing large-scale, high-quality multimodal samples augmented with domain knowledge and reasoning annotations. For training, we adopt a three-stage pipeline that includes continued pretraining for risk-concept cross-modal alignment, instruct post-training for production-grade safety tasks, and reasoning post-training for enhanced interpretability and performance in complex tasks. We further introduce Confuse-then-Contrast Fine-Tuning, a contrastive framework that mines model-specific confusions and constructs multi-image contrastive groups to enforce explicit discrimination of fine-grained visual-semantic elements, enabling the model to distinguish between visually similar cases with different safety implications in adversarial safety tasks. To support rigorous evaluation, we further introduce Yuvion VL RiskEval (YVRE), a collection of benchmarks covering diverse open and internal evaluations, with a focus on content and AI safety, adversarial robustness, and real-world capability requirements. Experiments show that Yuvion VL-32B achieves industry-leading safety performance, surpassing comparably sized open-source models and best closed-source commercial models, while maintaining comparable general capabilities.
MathSE: Improving Multimodal Mathematical Reasoning via Self-Evolving Iterative Reflection and Reward-Guided Fine-Tuning
Nov 10, 2025Multimodal large language models (MLLMs) have demonstrated remarkable capabilities in vision-language answering tasks. Despite their strengths, these models often encounter challenges in achieving complex reasoning tasks such as mathematical problem-solving. Previous works have focused on fine-tuning on specialized mathematical datasets. However, these datasets are typically distilled directly from teacher models, which capture only static reasoning patterns and leaving substantial gaps compared to student models. This reliance on fixed teacher-derived datasets not only restricts the model's ability to adapt to novel or more intricate questions that extend beyond the confines of the training data, but also lacks the iterative depth needed for robust generalization. To overcome these limitations, we propose \textbf{\method}, a \textbf{Math}ematical \textbf{S}elf-\textbf{E}volving framework for MLLMs. In contrast to traditional one-shot fine-tuning paradigms, \method iteratively refines the model through cycles of inference, reflection, and reward-based feedback. Specifically, we leverage iterative fine-tuning by incorporating correct reasoning paths derived from previous-stage inference and integrating reflections from a specialized Outcome Reward Model (ORM). To verify the effectiveness of \method, we evaluate it on a suite of challenging benchmarks, demonstrating significant performance gains over backbone models. Notably, our experimental results on MathVL-test surpass the leading open-source multimodal mathematical reasoning model QVQ. Our code and models are available at \texttt{https://zheny2751\allowbreak-dotcom.github.io/\allowbreak MathSE.github.io/}.
GLM-4.1V-Thinking: Towards Versatile Multimodal Reasoning with Scalable Reinforcement Learning
Jul 02, 2025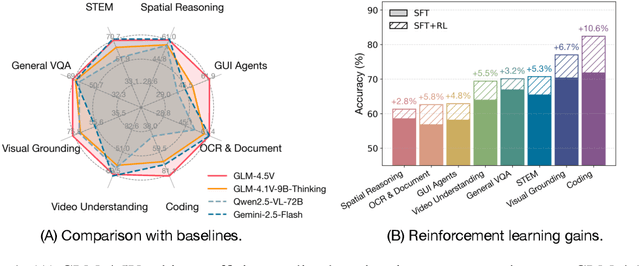
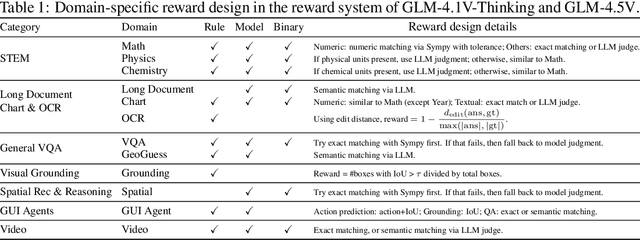
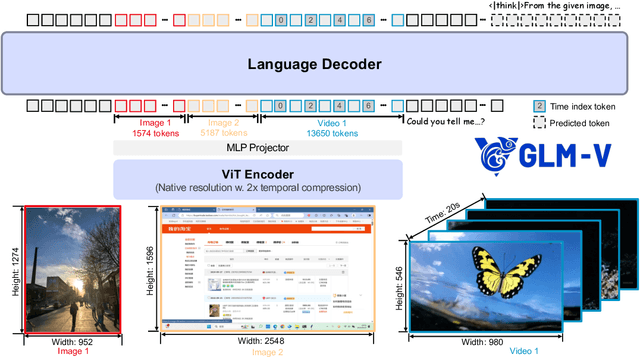

We present GLM-4.1V-Thinking, a vision-language model (VLM) designed to advance general-purpose multimodal understanding and reasoning. In this report, we share our key findings in the development of the reasoning-centric training framework. We first develop a capable vision foundation model with significant potential through large-scale pre-training, which arguably sets the upper bound for the final performance. We then propose Reinforcement Learning with Curriculum Sampling (RLCS) to unlock the full potential of the model, leading to comprehensive capability enhancement across a diverse range of tasks, including STEM problem solving, video understanding, content recognition, coding, grounding, GUI-based agents, and long document understanding. We open-source GLM-4.1V-9B-Thinking, which achieves state-of-the-art performance among models of comparable size. In a comprehensive evaluation across 28 public benchmarks, our model outperforms Qwen2.5-VL-7B on nearly all tasks and achieves comparable or even superior performance on 18 benchmarks relative to the significantly larger Qwen2.5-VL-72B. Notably, GLM-4.1V-9B-Thinking also demonstrates competitive or superior performance compared to closed-source models such as GPT-4o on challenging tasks including long document understanding and STEM reasoning, further underscoring its strong capabilities. Code, models and more information are released at https://github.com/THUDM/GLM-4.1V-Thinking.
MedVKAN: Efficient Feature Extraction with Mamba and KAN for Medical Image Segmentation
May 17, 2025Medical image segmentation relies heavily on convolutional neural networks (CNNs) and Transformer-based models. However, CNNs are constrained by limited receptive fields, while Transformers suffer from scalability challenges due to their quadratic computational complexity. To address these limitations, recent advances have explored alternative architectures. The state-space model Mamba offers near-linear complexity while capturing long-range dependencies, and the Kolmogorov-Arnold Network (KAN) enhances nonlinear expressiveness by replacing fixed activation functions with learnable ones. Building on these strengths, we propose MedVKAN, an efficient feature extraction model integrating Mamba and KAN. Specifically, we introduce the EFC-KAN module, which enhances KAN with convolutional operations to improve local pixel interaction. We further design the VKAN module, integrating Mamba with EFC-KAN as a replacement for Transformer modules, significantly improving feature extraction. Extensive experiments on five public medical image segmentation datasets show that MedVKAN achieves state-of-the-art performance on four datasets and ranks second on the remaining one. These results validate the potential of Mamba and KAN for medical image segmentation while introducing an innovative and computationally efficient feature extraction framework. The code is available at: https://github.com/beginner-cjh/MedVKAN.
Motion Forecasting for Autonomous Vehicles: A Survey
Feb 10, 2025In recent years, the field of autonomous driving has attracted increasingly significant public interest. Accurately forecasting the future behavior of various traffic participants is essential for the decision-making of Autonomous Vehicles (AVs). In this paper, we focus on both scenario-based and perception-based motion forecasting for AVs. We propose a formal problem formulation for motion forecasting and summarize the main challenges confronting this area of research. We also detail representative datasets and evaluation metrics pertinent to this field. Furthermore, this study classifies recent research into two main categories: supervised learning and self-supervised learning, reflecting the evolving paradigms in both scenario-based and perception-based motion forecasting. In the context of supervised learning, we thoroughly examine and analyze each key element of the methodology. For self-supervised learning, we summarize commonly adopted techniques. The paper concludes and discusses potential research directions, aiming to propel progress in this vital area of AV technology.