 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Behavioral Alignment in LLM Social Simulations via Context Formation and Navigation
Jan 04, 2026Large language models (LLMs) are increasingly used to simulate human behavior in experimental settings, but they systematically diverge from human decisions in complex decision-making environments, where participants must anticipate others' actions and form beliefs based on observed behavior. We propose a two-stage framework for improving behavioral alignment. The first stage, context formation, explicitly specifies the experimental design to establish an accurate representation of the decision task and its context. The second stage, context navigation, guides the reasoning process within that representation to make decisions. We validate this framework through a focal replication of a sequential purchasing game with quality signaling (Kremer and Debo, 2016), extending to a crowdfunding game with costly signaling (Cason et al., 2025) and a demand-estimation task (Gui and Toubia, 2025) to test generalizability across decision environments. Across four state-of-the-art (SOTA) models (GPT-4o, GPT-5, Claude-4.0-Sonnet-Thinking, DeepSeek-R1), we find that complex decision-making environments require both stages to achieve behavioral alignment with human benchmarks, whereas the simpler demand-estimation task requires only context formation. Our findings clarify when each stage is necessary and provide a systematic approach for designing and diagnosing LLM social simulations as complements to human subjects in behavioral research.
Hybrid LLM and Higher-Order Quantum Approximate Optimization for CSA Collateral Management
Oct 30, 2025We address finance-native collateral optimization under ISDA Credit Support Annexes (CSAs), where integer lots, Schedule A haircuts, RA/MTA gating, and issuer/currency/class caps create rugged, legally bounded search spaces. We introduce a certifiable hybrid pipeline purpose-built for this domain: (i) an evidence-gated LLM that extracts CSA terms to a normalized JSON (abstain-by-default, span-cited); (ii) a quantum-inspired explorer that interleaves simulated annealing with micro higher order QAOA (HO-QAOA) on binding sub-QUBOs (subset size n <= 16, order k <= 4) to coordinate multi-asset moves across caps and RA-induced discreteness; (iii) a weighted risk-aware objective (Movement, CVaR, funding-priced overshoot) with an explicit coverage window U <= Reff+B; and (iv) CP-SAT as single arbiter to certify feasibility and gaps, including a U-cap pre-check that reports the minimal feasible buffer B*. Encoding caps/rounding as higher-order terms lets HO-QAOA target the domain couplings that defeat local swaps. On government bond datasets and multi-CSA inputs, the hybrid improves a strong classical baseline (BL-3) by 9.1%, 9.6%, and 10.7% across representative harnesses, delivering better cost-movement-tail frontiers under governance settings. We release governance grade artifacts-span citations, valuation matrix audit, weight provenance, QUBO manifests, and CP-SAT traces-to make results auditable and reproducible.
Automatic Identification of Driving Maneuver Patterns using a Robust Hidden Semi-Markov Models
Nov 13, 2023



There is an increase in interest to model driving maneuver patterns via the automatic unsupervised clustering of naturalistic sequential kinematic driving data. The patterns learned are often used in transportation research areas such as eco-driving, road safety, and intelligent vehicles. One such model capable of modeling these patterns is the Hierarchical Dirichlet Process Hidden Semi-Markov Model (HDP-HSMM), as it is often used to estimate data segmentation, state duration, and transition probabilities. While this model is a powerful tool for automatically clustering observed sequential data, the existing HDP-HSMM estimation suffers from an inherent tendency to overestimate the number of states. This can result in poor estimation, which can potentially impact impact transportation research through incorrect inference of driving patterns. In this paper, a new robust HDP-HSMM (rHDP-HSMM) method is proposed to reduce the number of redundant states and improve the consistency of the model's estimation. Both a simulation study and a case study using naturalistic driving data are presented to demonstrate the effectiveness of the proposed rHDP-HSMM in identifying and inference of driving maneuver patterns.
Jointly Learning Explainable Rules for Recommendation with Knowledge Graph
Mar 09, 2019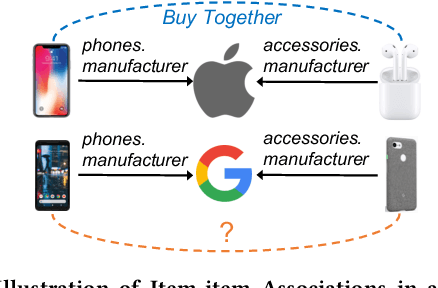

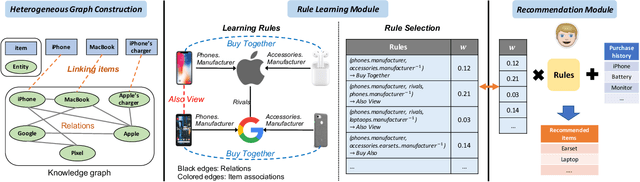

Explainability and effectiveness are two key aspects for building recommender systems. Prior efforts mostly focus on incorporating side information to achieve better recommendation performance. However, these methods have some weaknesses: (1) prediction of neural network-based embedding methods are hard to explain and debug; (2) symbolic, graph-based approaches (e.g., meta path-based models) require manual efforts and domain knowledge to define patterns and rules, and ignore the item association types (e.g. substitutable and complementary). In this paper, we propose a novel joint learning framework to integrate \textit{induction of explainable rules from knowledge graph} with \textit{construction of a rule-guided neural recommendation model}. The framework encourages two modules to complement each other in generating effective and explainable recommendation: 1) inductive rules, mined from item-centric knowledge graphs, summarize common multi-hop relational patterns for inferring different item associations and provide human-readable explanation for model prediction; 2) recommendation module can be augmented by induced rules and thus have better generalization ability dealing with the cold-start issue. Extensive experiments\footnote{Code and data can be found at: \url{https://github.com/THUIR/RuleRec}} show that our proposed method has achieved significant improvements in item recommendation over baselines on real-world datasets. Our model demonstrates robust performance over "noisy" item knowledge graphs, generated by linking item names to related entities.