 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContour Moments Based Manipulation of Composite Rigid-Deformable Objects with Finite Time Model Estimation and Shape/Position Control
Jun 04, 2021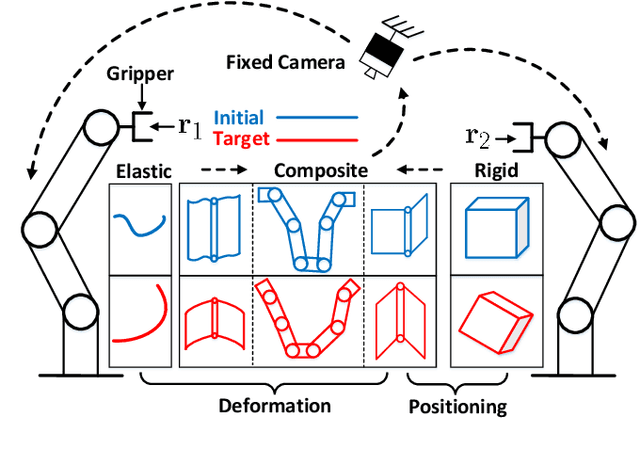
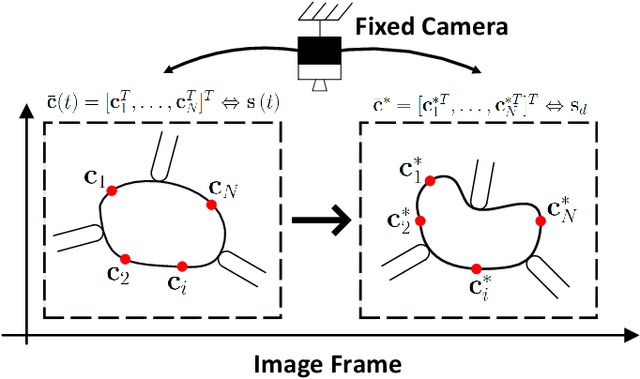
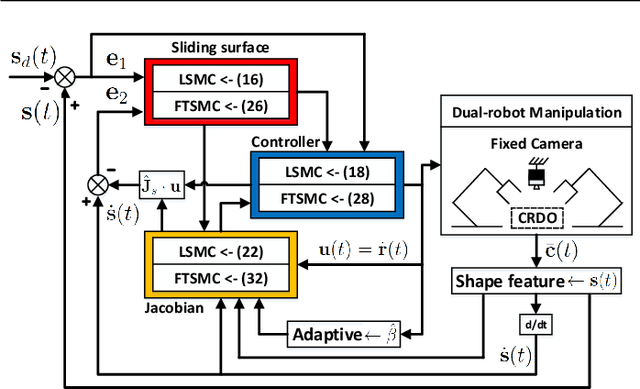
The robotic manipulation of composite rigid-deformable objects (i.e. those with mixed non-homogeneous stiffness properties) is a challenging problem with clear practical applications that, despite the recent progress in the field, it has not been sufficiently studied in the literature. To deal with this issue, in this paper we propose a new visual servoing method that has the capability to manipulate this broad class of objects (which varies from soft to rigid) with the same adaptive strategy. To quantify the object's infinite-dimensional configuration, our new approach computes a compact feedback vector of 2D contour moments features. A sliding mode control scheme is then designed to simultaneously ensure the finite-time convergence of both the feedback shape error and the model estimation error. The stability of the proposed framework (including the boundedness of all the signals) is rigorously proved with Lyapunov theory. Detailed simulations and experiments are presented to validate the effectiveness of the proposed approach. To the best of the author's knowledge, this is the first time that contour moments along with finite-time control have been used to solve this difficult manipulation problem.
Challenges and Outlook in Robotic Manipulation of Deformable Objects
May 04, 2021
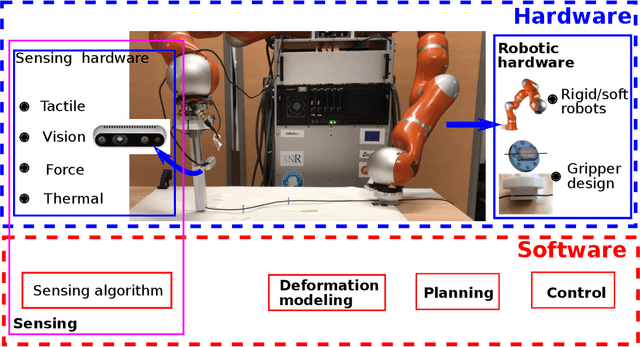
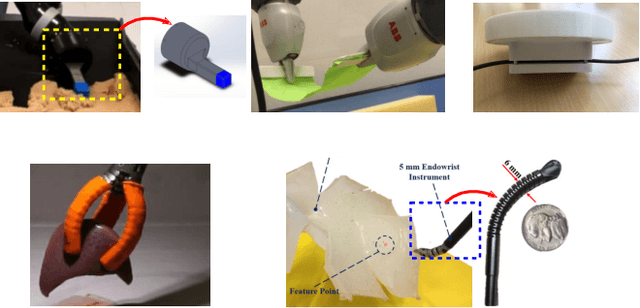
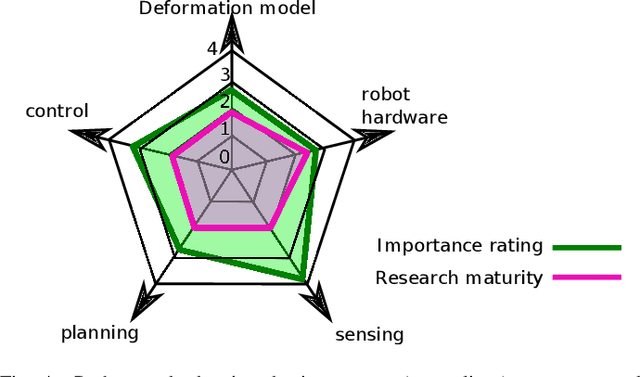
Deformable object manipulation (DOM) is an emerging research problem in robotics. The ability to manipulate deformable objects endows robots with higher autonomy and promises new applications in the industrial, services, and healthcare sectors. However, compared to rigid object manipulation, the manipulation of deformable objects is considerably more complex and is still an open research problem. Tackling the challenges in DOM demands breakthroughs in almost all aspects of robotics, namely hardware design, sensing, deformation modeling, planning, and control. In this article, we highlight the main challenges that arise by considering deformation and review recent advances in each sub-field. A particular focus of our paper lies in the discussions of these challenges and proposing promising directions of research.
3D Adversarial Attacks Beyond Point Cloud
Apr 25, 2021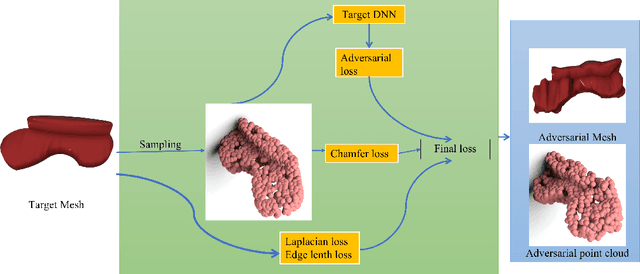
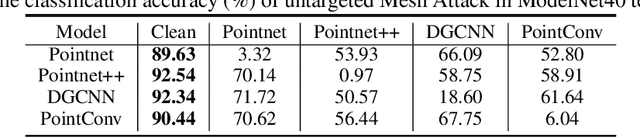
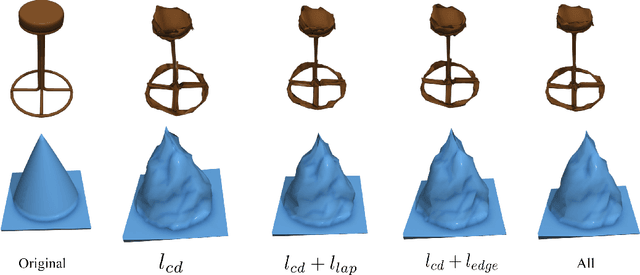
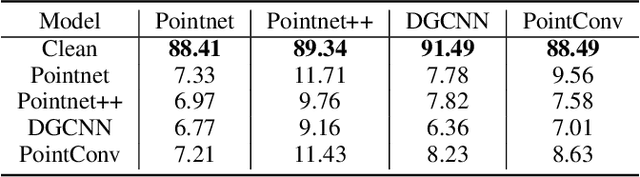
Previous adversarial attacks on 3D point clouds mainly focus on add perturbation to the original point cloud, but the generated adversarial point cloud example does not strictly represent a 3D object in the physical world and has lower transferability or easily defend by the simple SRS/SOR. In this paper, we present a novel adversarial attack, named Mesh Attack to address this problem. Specifically, we perform perturbation on the mesh instead of point clouds and obtain the adversarial mesh examples and point cloud examples simultaneously. To generate adversarial examples, we use a differential sample module that back-propagates the loss of point cloud classifier to the mesh vertices and a mesh loss that regularizes the mesh to be smooth. Extensive experiments demonstrated that the proposed scheme outperforms the SOTA attack methods. Our code is available at: {\footnotesize{\url{https://github.com/cuge1995/Mesh-Attack}}}.
Improving Long-Tailed Classification from Instance Level
Apr 13, 2021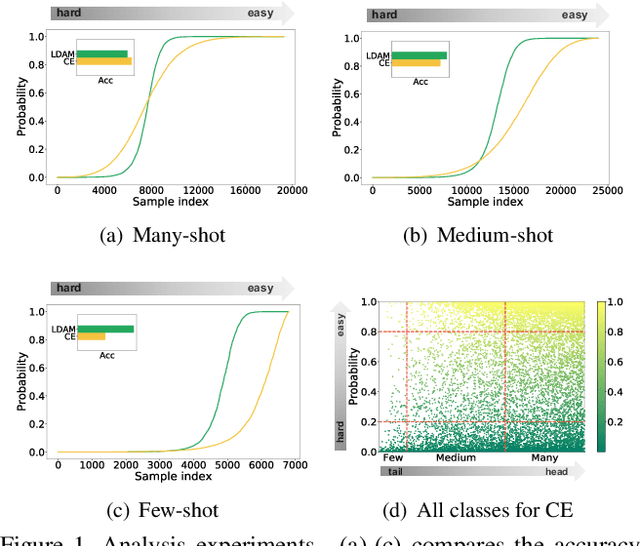
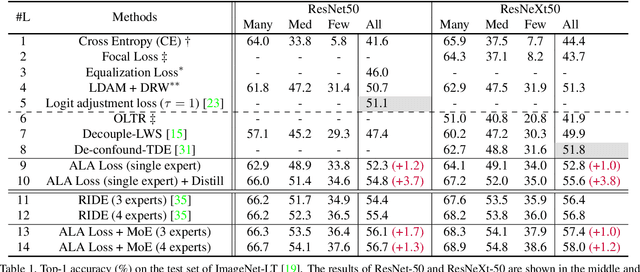
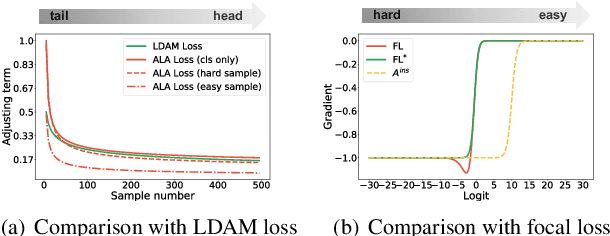

Data in the real world tends to exhibit a long-tailed label distribution, which poses great challenges for neural networks in classification. Existing methods tackle this problem mainly from the coarse-grained class level, ignoring the difference among instances, e.g., hard samples vs. easy samples. In this paper, we revisit the long-tailed problem from the instance level and propose two instance-level components to improve long-tailed classification. The first one is an Adaptive Logit Adjustment (ALA) loss, which applies an adaptive adjusting term to the logit. Different from the adjusting terms in existing methods that are class-dependent and only focus on tail classes, we carefully design an instance-specific term and add it on the class-dependent term to make the network pay more attention to not only tailed class, but more importantly hard samples. The second one is a Mixture-of-Experts (MoE) network, which contains a multi-expert module and an instance-aware routing module. The routing module is designed to dynamically integrate the results of multiple experts according to each input instance, and is trained jointly with the experts network in an end-to-end manner.Extensive experiment results show that our method outperforms the state-of-the-art methods by 1% to 5% on common long-tailed benchmarks including ImageNet-LT and iNaturalist.
The art of defense: letting networks fool the attacker
Apr 07, 2021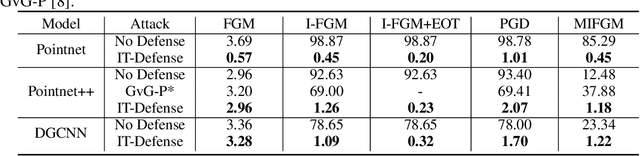
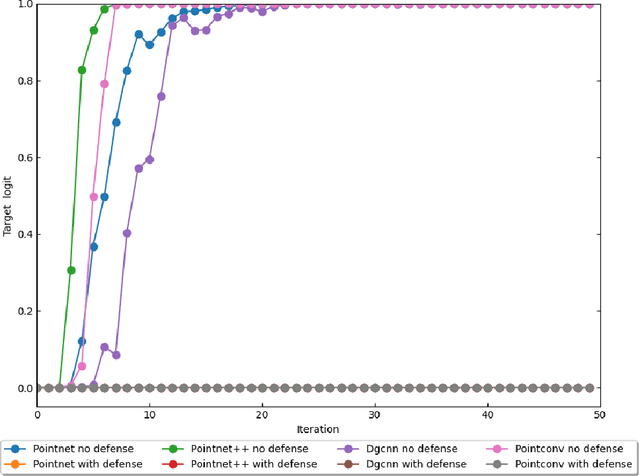
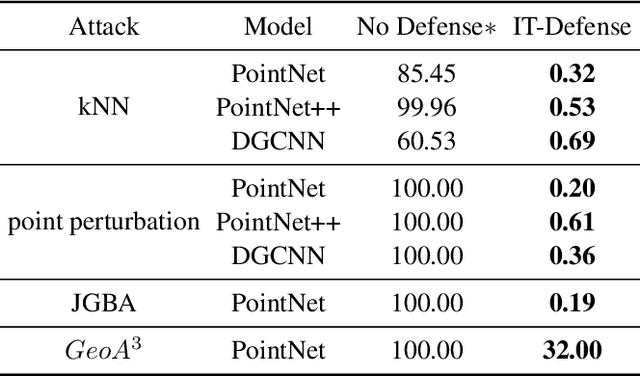
Some deep neural networks are invariant to some input transformations, such as Pointnetis permutation invariant to the input point cloud. In this paper, we demonstrated this property can be powerful in the defense of gradient based attacks. Specifically, we apply random input transformation which is invariant to networks we want to defend. Extensive experiments demonstrate that the proposed scheme outperforms the SOTA defense methods, and breaking the attack accuracy into nearly zero.
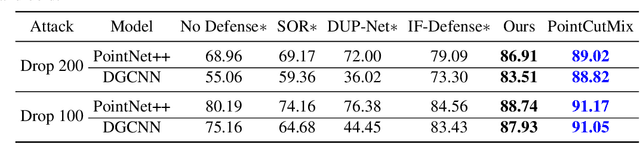
PointCutMix: Regularization Strategy for Point Cloud Classification
Feb 05, 2021
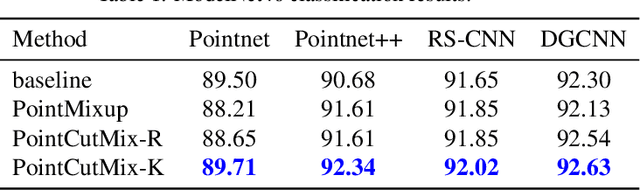

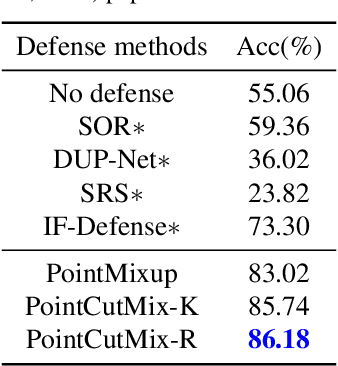
As 3D point cloud analysis has received increasing attention, the insufficient scale of point cloud datasets and the weak generalization ability of networks become prominent. In this paper, we propose a simple and effective augmentation method for the point cloud data, named PointCutMix, to alleviate those problems. It finds the optimal assignment between two point clouds and generates new training data by replacing the points in one sample with their optimal assigned pairs. Two replacement strategies are proposed to adapt to the accuracy or robustness requirement for different tasks, one of which is to randomly select all replacing points while the other one is to select k nearest neighbors of a single random point. Both strategies consistently and significantly improve the performance of various models on point cloud classification problems. By introducing the saliency maps to guide the selection of replacing points, the performance further improves. Moreover, PointCutMix is validated to enhance the model robustness against the point attack. It is worth noting that when using as a defense method, our method outperforms the state-of-the-art defense algorithms. The code is available at:https://github.com/cuge1995/PointCutMix
Shape Control of Elastic Objects Based on Implicit Sensorimotor Models and Data-Driven Geometric Features
Jan 06, 2021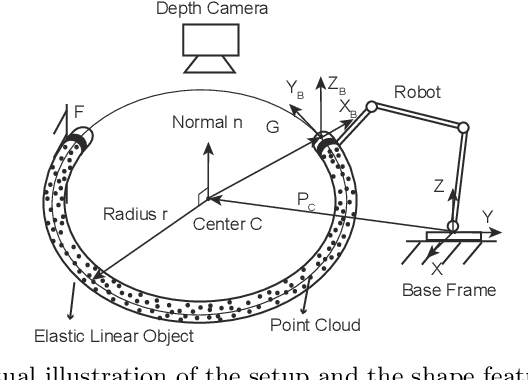
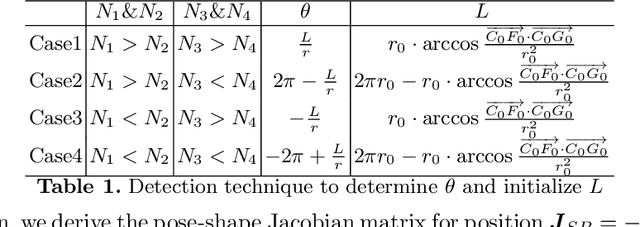
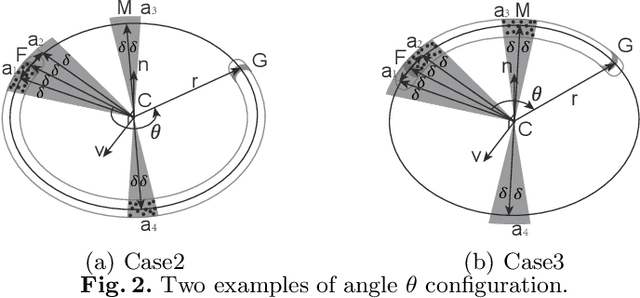
This paper proposes a general approach to design automatic controls to manipulate elastic objects into desired shapes. The object's geometric model is defined as the shape feature based on the specific task to globally describe the deformation. Raw visual feedback data is processed using classic regression methods to identify parameters of data-driven geometric models in real-time. Our proposed method is able to analytically compute a pose-shape Jacobian matrix based on implicit functions. This model is then used to derive a shape servoing controller. To validate the proposed method, we report a detailed experimental study with robotic manipulators deforming an elastic rod.
LaSeSOM: A Latent Representation Framework for Semantic Soft Object Manipulation
Dec 10, 2020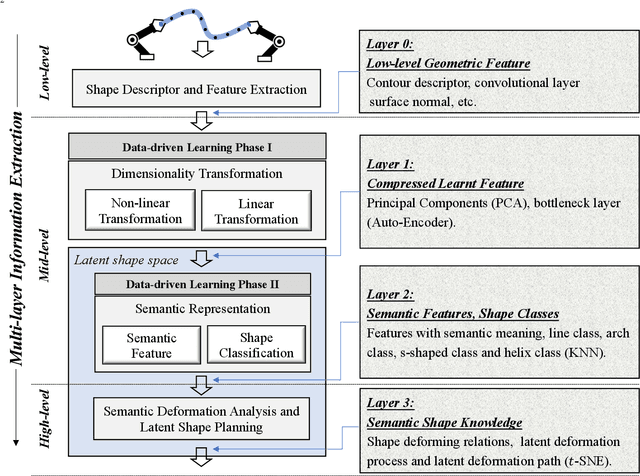
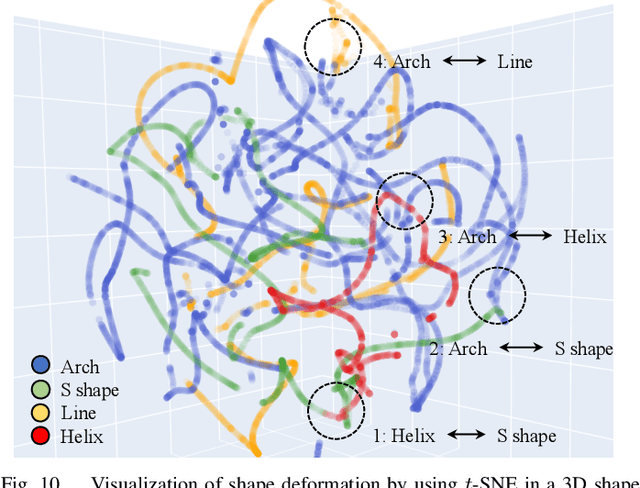
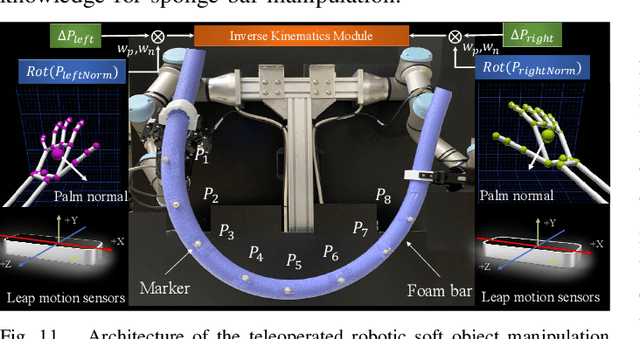
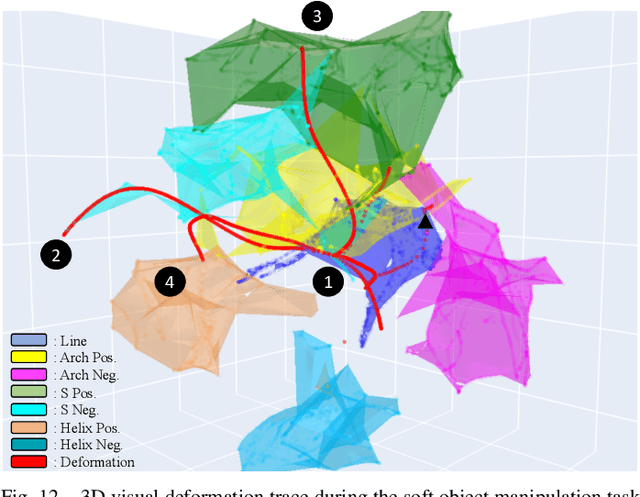
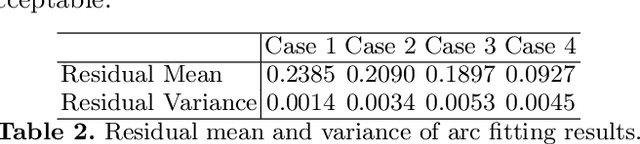
Soft object manipulation has recently gained popularity within the robotics community due to its potential applications in many economically important areas. Although great progress has been recently achieved in these types of tasks, most state-of-the-art methods are case-specific; They can only be used to perform a single deformation task (e.g. bending), as their shape representation algorithms typically rely on "hard-coded" features. In this paper, we present LaSeSOM, a new feedback latent representation framework for semantic soft object manipulation. Our new method introduces internal latent representation layers between low-level geometric feature extraction and high-level semantic shape analysis; This allows the identification of each compressed semantic function and the formation of a valid shape classifier from different feature extraction levels. The proposed latent framework makes soft object representation more generic (independent from the object's geometry and its mechanical properties) and scalable (it can work with 1D/2D/3D tasks). Its high-level semantic layer enables to perform (quasi) shape planning tasks with soft objects, a valuable and underexplored capability in many soft manipulation tasks. To validate this new methodology, we report a detailed experimental study with robotic manipulators.
Robust Autonomous Landing of UAV in Non-Cooperative Environments based on Dynamic Time Camera-LiDAR Fusion
Nov 27, 2020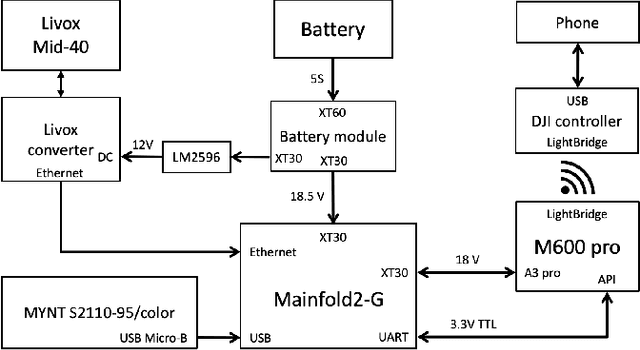
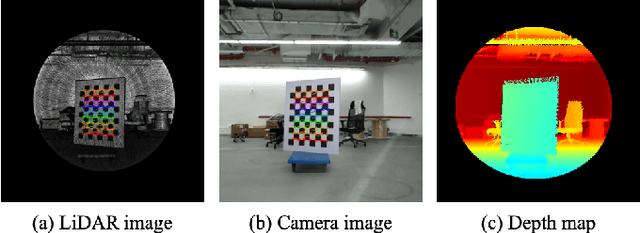
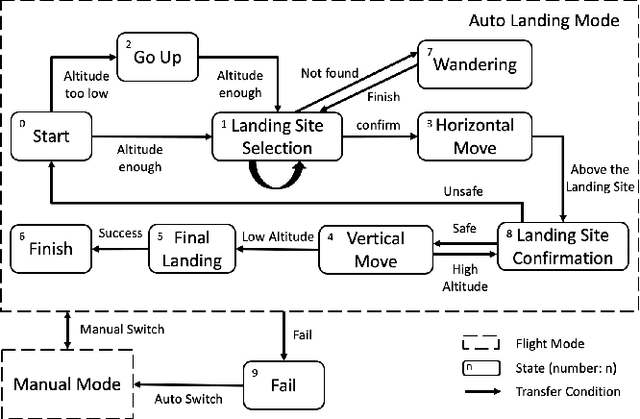
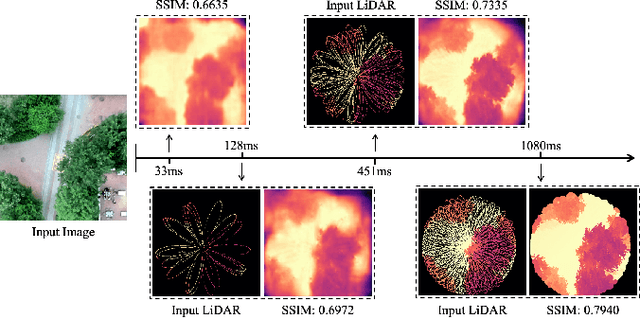
Selecting safe landing sites in non-cooperative environments is a key step towards the full autonomy of UAVs. However, the existing methods have the common problems of poor generalization ability and robustness. Their performance in unknown environments is significantly degraded and the error cannot be self-detected and corrected. In this paper, we construct a UAV system equipped with low-cost LiDAR and binocular cameras to realize autonomous landing in non-cooperative environments by detecting the flat and safe ground area. Taking advantage of the non-repetitive scanning and high FOV coverage characteristics of LiDAR, we come up with a dynamic time depth completion algorithm. In conjunction with the proposed self-evaluation method of the depth map, our model can dynamically select the LiDAR accumulation time at the inference phase to ensure an accurate prediction result. Based on the depth map, the high-level terrain information such as slope, roughness, and the size of the safe area are derived. We have conducted extensive autonomous landing experiments in a variety of familiar or completely unknown environments, verifying that our model can adaptively balance the accuracy and speed, and the UAV can robustly select a safe landing site.
Vision-based Manipulation of Deformable and Rigid Objects Using Subspace Projections of 2D Contours
Jun 16, 2020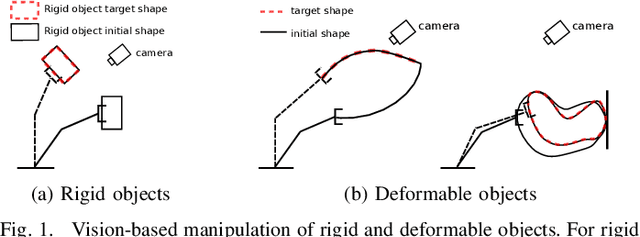
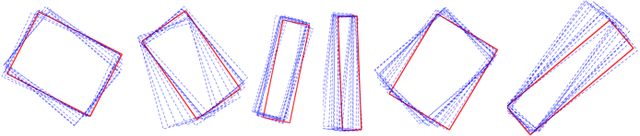
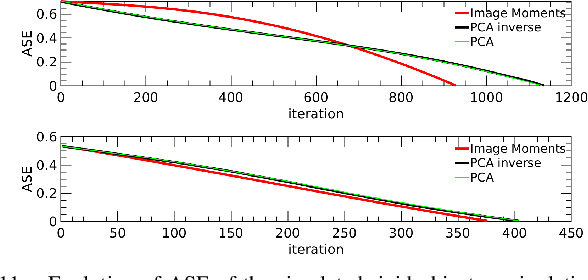
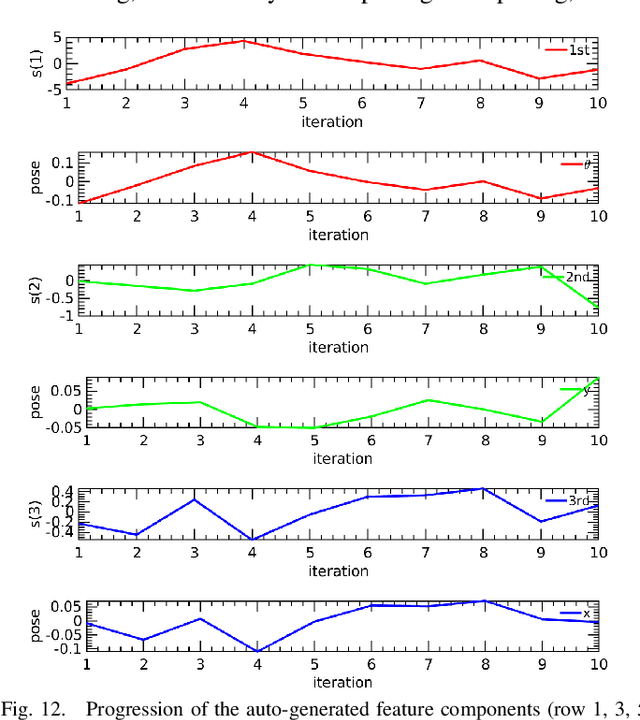
This paper proposes a unified vision-based manipulation framework using image contours of deformable/rigid objects. Instead of using human-defined cues, the robot automatically learns the features from processed vision data. Our method simultaneously generates---from the same data---both, visual features and the interaction matrix that relates them to the robot control inputs. Extraction of the feature vector and control commands is done online and adaptively, with little data for initialization. The method allows the robot to manipulate an object without knowing whether it is rigid or deformable. To validate our approach, we conduct numerical simulations and experiments with both deformable and rigid objects.