 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTuringViT: Making SOTA Vision Transformers Accessible to All
Jun 23, 2026Modern VLMs and VLA systems commonly adopt off-the-shelf ViTs such as SigLIP2 as visual encoders, but diverse downstream requirements in latency, temporal modeling, and VLM integration often call for customized SOTA-level ViTs. Training such encoders remains beyond the reach of much of the community, as it requires massive image-text data, while standard softmax attention makes high-resolution or dynamic-resolution pretraining prohibitively costly and often forces low-resolution pretraining followed by post-hoc adaptation. TuringViT addresses these challenges with three key designs: Turing Linear Attention (TLA) for efficient sequence modeling, VISTA-Curation to construct supervision-rich image-video training data, and native dynamic-resolution pretraining that supports flexible inputs from the start and transfers seamlessly to downstream VLMs. As a result, TuringViT outperforms leading open-source ViT baselines with only 10% of the data, achieves stronger downstream VLM performance, and delivers substantially better latency scaling on high-resolution inputs. Our scaling-law analysis further shows that TuringViT continues to improve predictably with curated data scale, far from saturation. Its fast adaptation, hardware-friendly design, and efficient deployment have made it a unified visual foundation across XPeng's AI systems. More broadly, TuringViT provides a reproducible pipeline that dramatically lowers the cost for the community to train, customize, and deploy SOTA-level ViTs, moving toward making such Vision Transformers accessible to all.
Boosting 3D Adversarial Attacks with Attacking On Frequency
Jan 26, 2022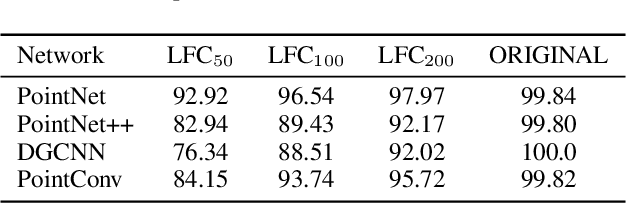
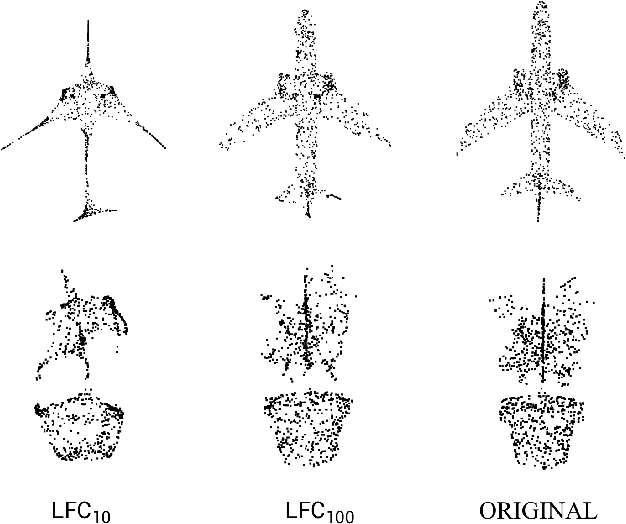
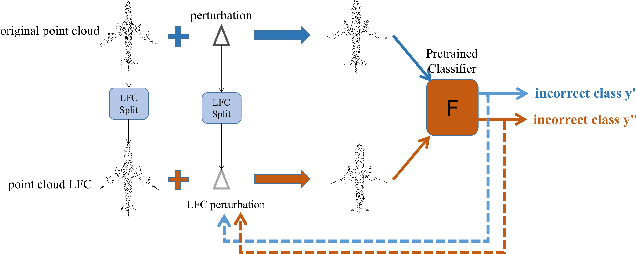
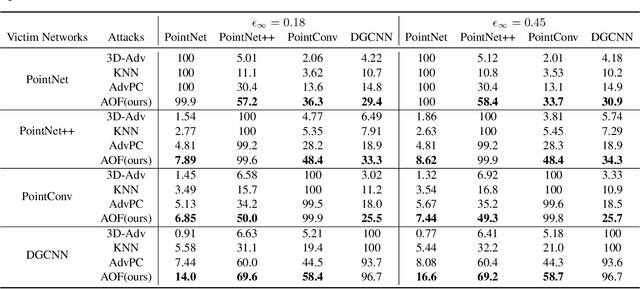
Deep neural networks (DNNs) have been shown to be vulnerable to adversarial attacks. Recently, 3D adversarial attacks, especially adversarial attacks on point clouds, have elicited mounting interest. However, adversarial point clouds obtained by previous methods show weak transferability and are easy to defend. To address these problems, in this paper we propose a novel point cloud attack (dubbed AOF) that pays more attention on the low-frequency component of point clouds. We combine the losses from point cloud and its low-frequency component to craft adversarial samples. Extensive experiments validate that AOF can improve the transferability significantly compared to state-of-the-art (SOTA) attacks, and is more robust to SOTA 3D defense methods. Otherwise, compared to clean point clouds, adversarial point clouds obtained by AOF contain more deformation than outlier.
3D Adversarial Attacks Beyond Point Cloud
Apr 25, 2021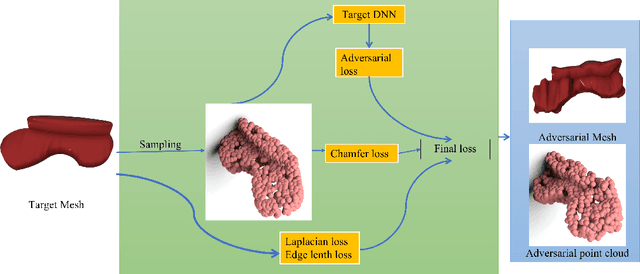
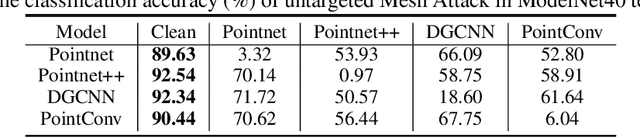
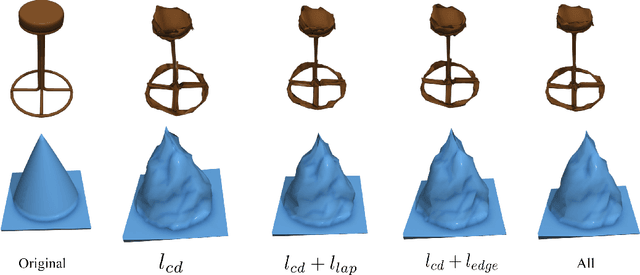
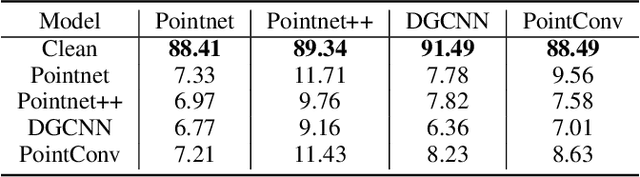
Previous adversarial attacks on 3D point clouds mainly focus on add perturbation to the original point cloud, but the generated adversarial point cloud example does not strictly represent a 3D object in the physical world and has lower transferability or easily defend by the simple SRS/SOR. In this paper, we present a novel adversarial attack, named Mesh Attack to address this problem. Specifically, we perform perturbation on the mesh instead of point clouds and obtain the adversarial mesh examples and point cloud examples simultaneously. To generate adversarial examples, we use a differential sample module that back-propagates the loss of point cloud classifier to the mesh vertices and a mesh loss that regularizes the mesh to be smooth. Extensive experiments demonstrated that the proposed scheme outperforms the SOTA attack methods. Our code is available at: {\footnotesize{\url{https://github.com/cuge1995/Mesh-Attack}}}.
PointCutMix: Regularization Strategy for Point Cloud Classification
Feb 05, 2021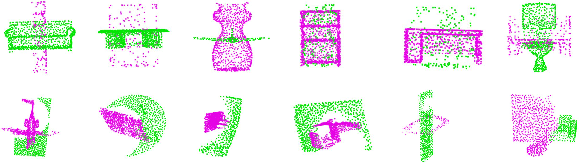
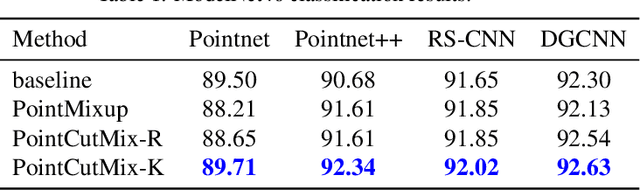

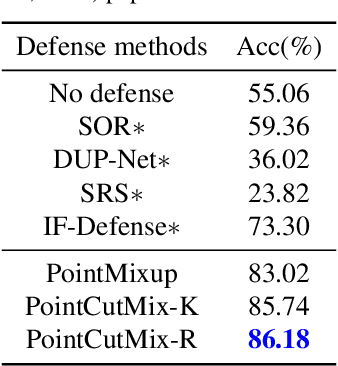
As 3D point cloud analysis has received increasing attention, the insufficient scale of point cloud datasets and the weak generalization ability of networks become prominent. In this paper, we propose a simple and effective augmentation method for the point cloud data, named PointCutMix, to alleviate those problems. It finds the optimal assignment between two point clouds and generates new training data by replacing the points in one sample with their optimal assigned pairs. Two replacement strategies are proposed to adapt to the accuracy or robustness requirement for different tasks, one of which is to randomly select all replacing points while the other one is to select k nearest neighbors of a single random point. Both strategies consistently and significantly improve the performance of various models on point cloud classification problems. By introducing the saliency maps to guide the selection of replacing points, the performance further improves. Moreover, PointCutMix is validated to enhance the model robustness against the point attack. It is worth noting that when using as a defense method, our method outperforms the state-of-the-art defense algorithms. The code is available at:https://github.com/cuge1995/PointCutMix
Robust Autonomous Landing of UAV in Non-Cooperative Environments based on Dynamic Time Camera-LiDAR Fusion
Nov 27, 2020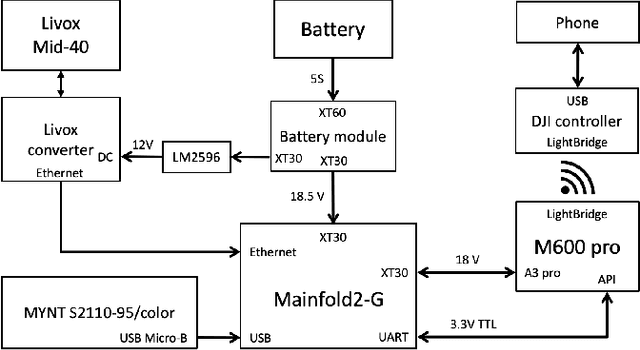
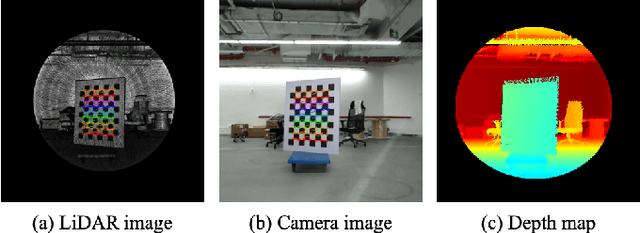
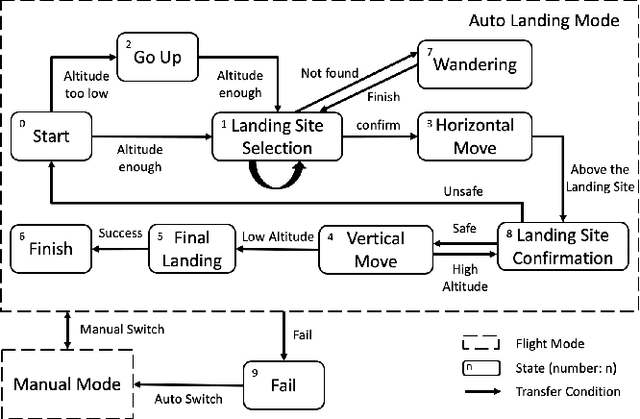
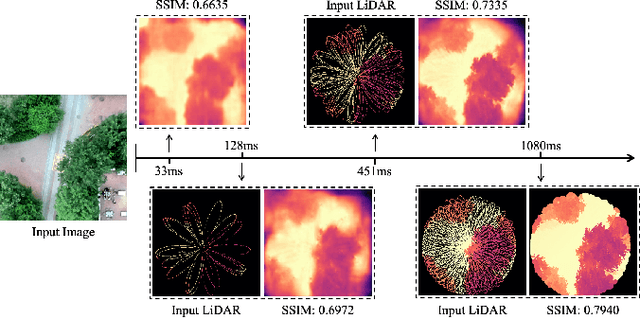
Selecting safe landing sites in non-cooperative environments is a key step towards the full autonomy of UAVs. However, the existing methods have the common problems of poor generalization ability and robustness. Their performance in unknown environments is significantly degraded and the error cannot be self-detected and corrected. In this paper, we construct a UAV system equipped with low-cost LiDAR and binocular cameras to realize autonomous landing in non-cooperative environments by detecting the flat and safe ground area. Taking advantage of the non-repetitive scanning and high FOV coverage characteristics of LiDAR, we come up with a dynamic time depth completion algorithm. In conjunction with the proposed self-evaluation method of the depth map, our model can dynamically select the LiDAR accumulation time at the inference phase to ensure an accurate prediction result. Based on the depth map, the high-level terrain information such as slope, roughness, and the size of the safe area are derived. We have conducted extensive autonomous landing experiments in a variety of familiar or completely unknown environments, verifying that our model can adaptively balance the accuracy and speed, and the UAV can robustly select a safe landing site.
Learning Transferable UAV for Forest Visual Perception
Jun 10, 2018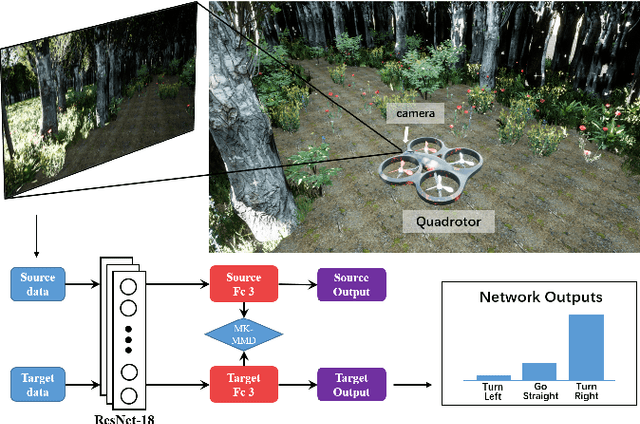

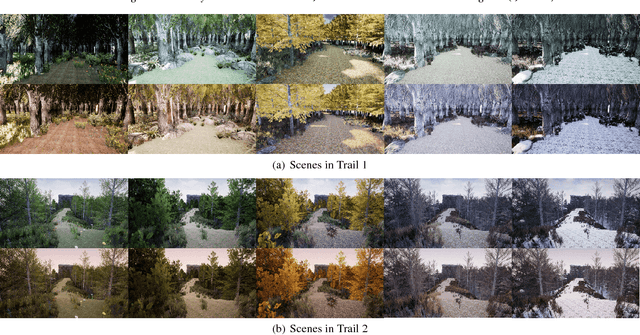
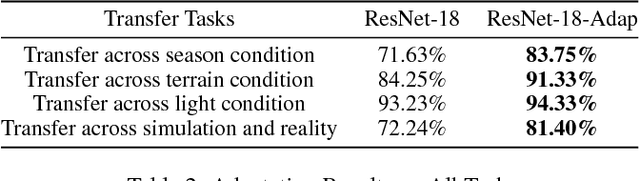
In this paper, we propose a new pipeline of training a monocular UAV to fly a collision-free trajectory along the dense forest trail. As gathering high-precision images in the real world is expensive and the off-the-shelf dataset has some deficiencies, we collect a new dense forest trail dataset in a variety of simulated environment in Unreal Engine. Then we formulate visual perception of forests as a classification problem. A ResNet-18 model is trained to decide the moving direction frame by frame. To transfer the learned strategy to the real world, we construct a ResNet-18 adaptation model via multi-kernel maximum mean discrepancies to leverage the relevant labelled data and alleviate the discrepancy between simulated and real environment. Simulation and real-world flight with a variety of appearance and environment changes are both tested. The ResNet-18 adaptation and its variant model achieve the best result of 84.08% accuracy in reality.