 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulator Adaptation for Sim-to-Real Learning of Legged Locomotion via Proprioceptive Distribution Matching
Apr 13, 2026Simulation trained legged locomotion policies often exhibit performance loss on hardware due to dynamics discrepancies between the simulator and the real world, highlighting the need for approaches that adapt the simulator itself to better match hardware behavior. Prior work typically quantify these discrepancies through precise, time-aligned matching of joint and base trajectories. This process requires motion capture, privileged sensing, and carefully controlled initial conditions. We introduce a practical alternative based on proprioceptive distribution matching, which compares hardware and simulation rollouts as distributions of joint observations and actions, eliminating the need for time alignment or external sensing. Using this metric as a black-box objective, we explore adapting simulator dynamics through parameter identification, action-delta models, and residual actuator models. Our approach matches the parameter recovery and policy-performance gains of privileged state-matching baselines across extensive sim-to-sim ablations on the Go2 quadruped. Real-world experiments demonstrate substantial drift reduction using less than five minutes of hardware data, even for a challenging two-legged walking behavior. These results demonstrate that proprioceptive distribution matching provides a practical and effective route to simulator adaptation for sim-to-real transfer of learned legged locomotion.
Learning Decentralized Multi-Biped Control for Payload Transport
Jun 25, 2024



Payload transport over flat terrain via multi-wheel robot carriers is well-understood, highly effective, and configurable. In this paper, our goal is to provide similar effectiveness and configurability for transport over rough terrain that is more suitable for legs rather than wheels. For this purpose, we consider multi-biped robot carriers, where wheels are replaced by multiple bipedal robots attached to the carrier. Our main contribution is to design a decentralized controller for such systems that can be effectively applied to varying numbers and configurations of rigidly attached bipedal robots without retraining. We present a reinforcement learning approach for training the controller in simulation that supports transfer to the real world. Our experiments in simulation provide quantitative metrics showing the effectiveness of the approach over a wide variety of simulated transport scenarios. In addition, we demonstrate the controller in the real-world for systems composed of two and three Cassie robots. To our knowledge, this is the first example of a scalable multi-biped payload transport system.
Revisiting Reward Design and Evaluation for Robust Humanoid Standing and Walking
Apr 30, 2024



A necessary capability for humanoid robots is the ability to stand and walk while rejecting natural disturbances. Recent progress has been made using sim-to-real reinforcement learning (RL) to train such locomotion controllers, with approaches differing mainly in their reward functions. However, prior works lack a clear method to systematically test new reward functions and compare controller performance through repeatable experiments. This limits our understanding of the trade-offs between approaches and hinders progress. To address this, we propose a low-cost, quantitative benchmarking method to evaluate and compare the real-world performance of standing and walking (SaW) controllers on metrics like command following, disturbance recovery, and energy efficiency. We also revisit reward function design and construct a minimally constraining reward function to train SaW controllers. We experimentally verify that our benchmarking framework can identify areas for improvement, which can be systematically addressed to enhance the policies. We also compare our new controller to state-of-the-art controllers on the Digit humanoid robot. The results provide clear quantitative trade-offs among the controllers and suggest directions for future improvements to the reward functions and expansion of the benchmarks.
Sim-to-Real Learning for Humanoid Box Loco-Manipulation
Oct 04, 2023



In this work we propose a learning-based approach to box loco-manipulation for a humanoid robot. This is a particularly challenging problem due to the need for whole-body coordination in order to lift boxes of varying weight, position, and orientation while maintaining balance. To address this challenge, we present a sim-to-real reinforcement learning approach for training general box pickup and carrying skills for the bipedal robot Digit. Our reward functions are designed to produce the desired interactions with the box while also valuing balance and gait quality. We combine the learned skills into a full system for box loco-manipulation to achieve the task of moving boxes from one table to another with a variety of sizes, weights, and initial configurations. In addition to quantitative simulation results, we demonstrate successful sim-to-real transfer on the humanoid r
Learning Vision-Based Bipedal Locomotion for Challenging Terrain
Sep 26, 2023



Reinforcement learning (RL) for bipedal locomotion has recently demonstrated robust gaits over moderate terrains using only proprioceptive sensing. However, such blind controllers will fail in environments where robots must anticipate and adapt to local terrain, which requires visual perception. In this paper, we propose a fully-learned system that allows bipedal robots to react to local terrain while maintaining commanded travel speed and direction. Our approach first trains a controller in simulation using a heightmap expressed in the robot's local frame. Next, data is collected in simulation to train a heightmap predictor, whose input is the history of depth images and robot states. We demonstrate that with appropriate domain randomization, this approach allows for successful sim-to-real transfer with no explicit pose estimation and no fine-tuning using real-world data. To the best of our knowledge, this is the first example of sim-to-real learning for vision-based bipedal locomotion over challenging terrains.
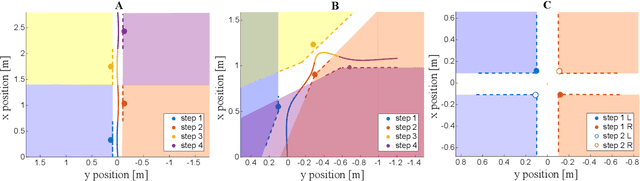
Dynamic Bipedal Maneuvers through Sim-to-Real Reinforcement Learning
Jul 16, 2022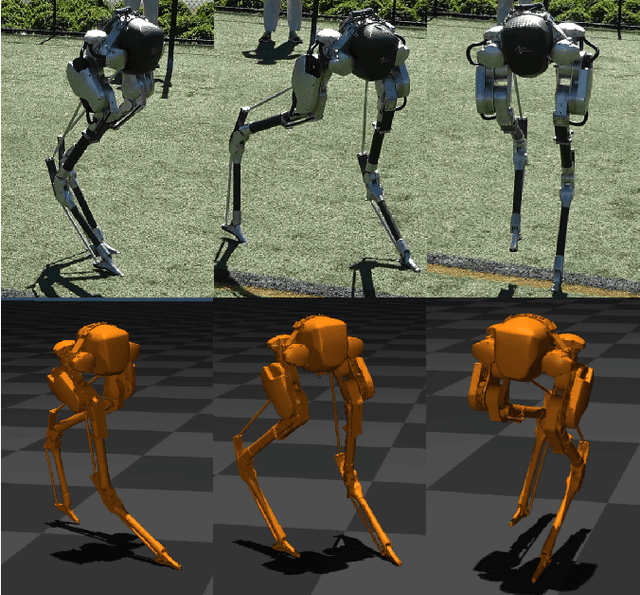
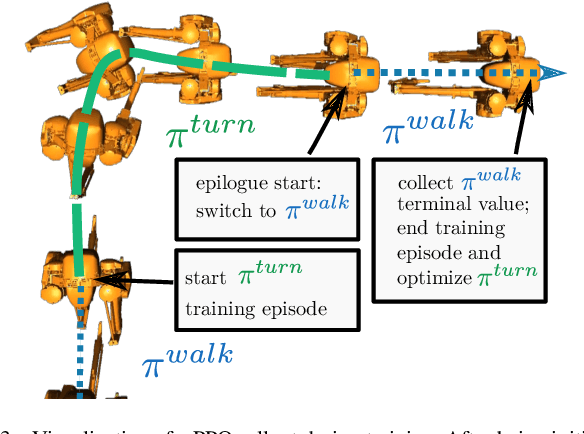
For legged robots to match the athletic capabilities of humans and animals, they must not only produce robust periodic walking and running, but also seamlessly switch between nominal locomotion gaits and more specialized transient maneuvers. Despite recent advancements in controls of bipedal robots, there has been little focus on producing highly dynamic behaviors. Recent work utilizing reinforcement learning to produce policies for control of legged robots have demonstrated success in producing robust walking behaviors. However, these learned policies have difficulty expressing a multitude of different behaviors on a single network. Inspired by conventional optimization-based control techniques for legged robots, this work applies a recurrent policy to execute four-step, 90 degree turns trained using reference data generated from optimized single rigid body model trajectories. We present a novel training framework using epilogue terminal rewards for learning specific behaviors from pre-computed trajectory data and demonstrate a successful transfer to hardware on the bipedal robot Cassie.
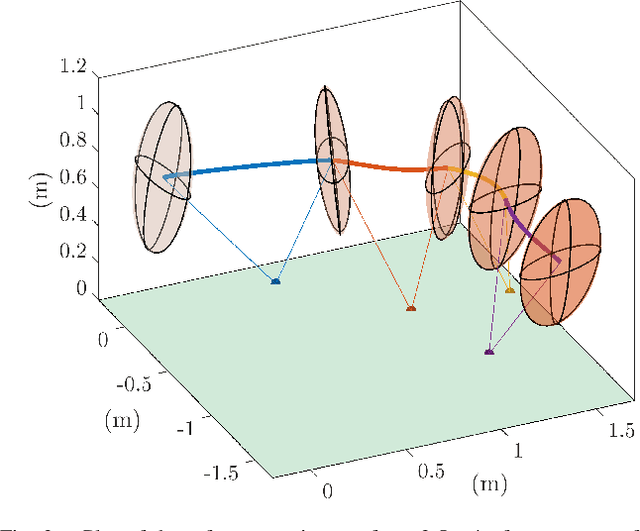
Optimizing Bipedal Maneuvers of Single Rigid-Body Models for Reinforcement Learning
Jul 09, 2022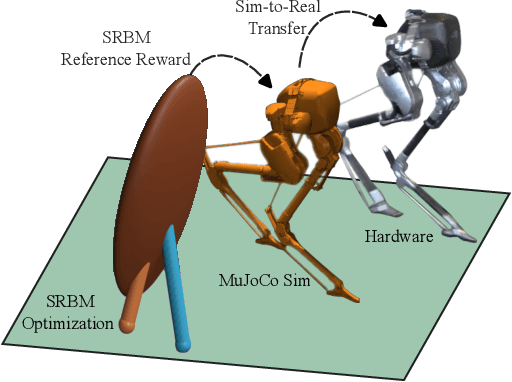
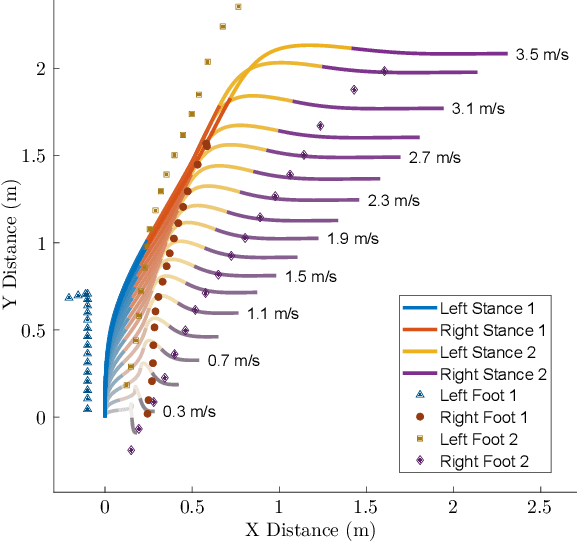
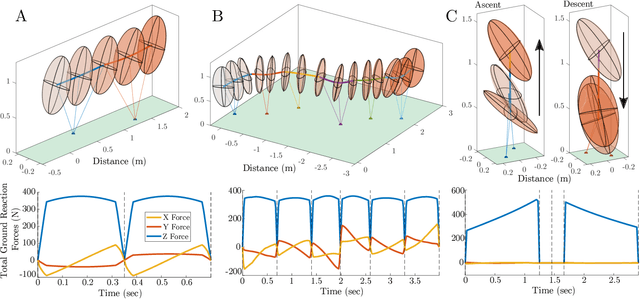
In this work, we propose a method to generate reduced-order model reference trajectories for general classes of highly dynamic maneuvers for bipedal robots for use in sim-to-real reinforcement learning. Our approach is to utilize a single rigid-body model (SRBM) to optimize libraries of trajectories offline to be used as expert references in the reward function of a learned policy. This method translates the model's dynamically rich rotational and translational behaviour to a full-order robot model and successfully transfers to real hardware. The SRBM's simplicity allows for fast iteration and refinement of behaviors, while the robustness of learning-based controllers allows for highly dynamic motions to be transferred to hardware. % Within this work we introduce a set of transferability constraints that amend the SRBM dynamics to actual bipedal robot hardware, our framework for creating optimal trajectories for dynamic stepping, turning maneuvers and jumps as well as our approach to integrating reference trajectories to a reinforcement learning policy. Within this work we introduce a set of transferability constraints that amend the SRBM dynamics to actual bipedal robot hardware, our framework for creating optimal trajectories for a variety of highly dynamic maneuvers as well as our approach to integrating reference trajectories for a high-speed running reinforcement learning policy. We validate our methods on the bipedal robot Cassie on which we were successfully able to demonstrate highly dynamic grounded running gaits up to 3.0 m/s.
Learning Dynamic Bipedal Walking Across Stepping Stones
May 03, 2022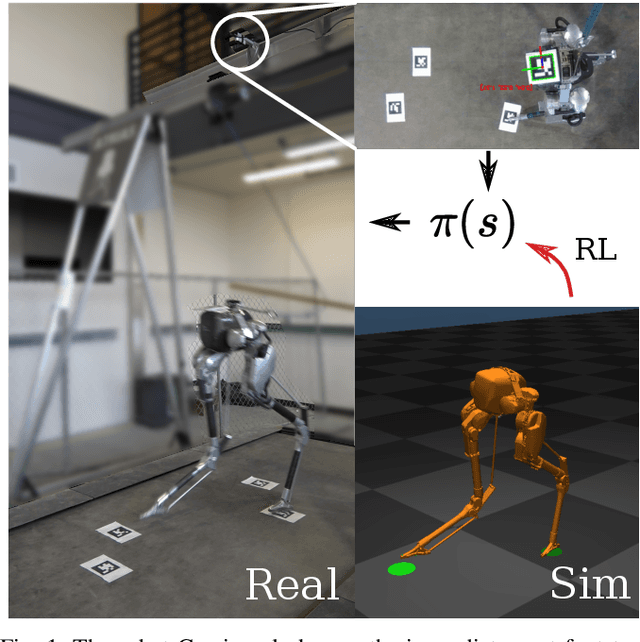
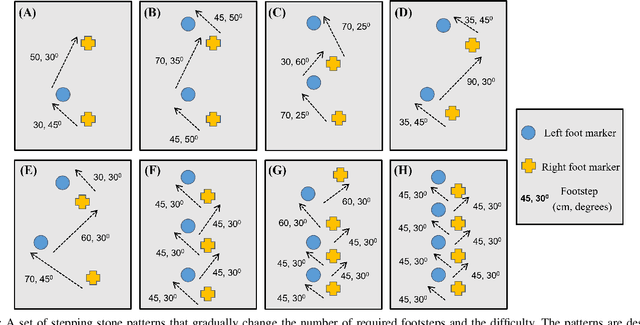
In this work, we propose a learning approach for 3D dynamic bipedal walking when footsteps are constrained to stepping stones. While recent work has shown progress on this problem, real-world demonstrations have been limited to relatively simple open-loop, perception-free scenarios. Our main contribution is a more advanced learning approach that enables real-world demonstrations, using the Cassie robot, of closed-loop dynamic walking over moderately difficult stepping-stone patterns. Our approach first uses reinforcement learning (RL) in simulation to train a controller that maps footstep commands onto joint actions without any reference motion information. We then learn a model of that controller's capabilities, which enables prediction of feasible footsteps given the robot's current dynamic state. The resulting controller and model are then integrated with a real-time overhead camera system for detecting stepping stone locations. For evaluation, we develop a benchmark set of stepping stone patterns, which are used to test performance in both simulation and the real world. Overall, we demonstrate that sim-to-real learning is extremely promising for enabling dynamic locomotion over stepping stones. We also identify challenges remaining that motivate important future research directions.
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
Apr 09, 2022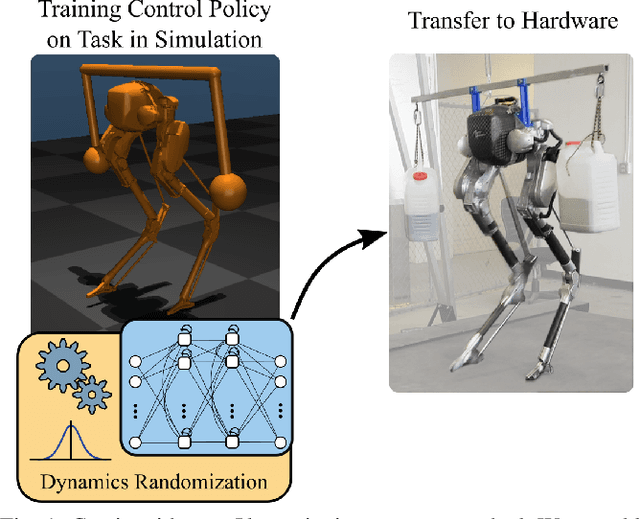
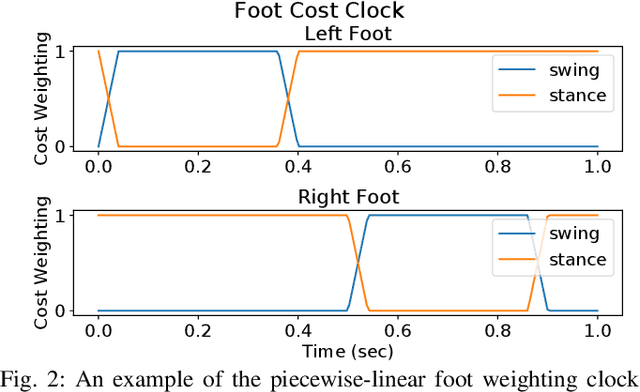
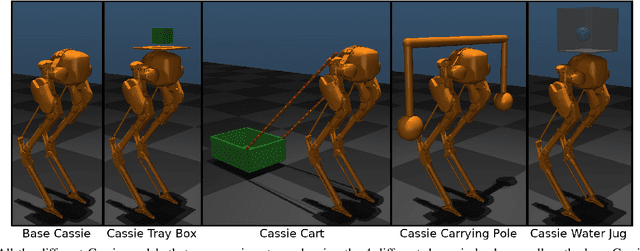
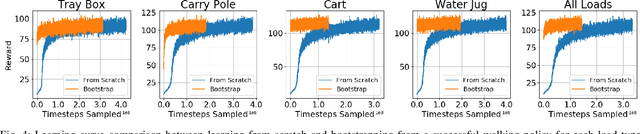
Recent work on sim-to-real learning for bipedal locomotion has demonstrated new levels of robustness and agility over a variety of terrains. However, that work, and most prior bipedal locomotion work, have not considered locomotion under a variety of external loads that can significantly influence the overall system dynamics. In many applications, robots will need to maintain robust locomotion under a wide range of potential dynamic loads, such as pulling a cart or carrying a large container of sloshing liquid, ideally without requiring additional load-sensing capabilities. In this work, we explore the capabilities of reinforcement learning (RL) and sim-to-real transfer for bipedal locomotion under dynamic loads using only proprioceptive feedback. We show that prior RL policies trained for unloaded locomotion fail for some loads and that simply training in the context of loads is enough to result in successful and improved policies. We also compare training specialized policies for each load versus a single policy for all considered loads and analyze how the resulting gaits change to accommodate different loads. Finally, we demonstrate sim-to-real transfer, which is successful but shows a wider sim-to-real gap than prior unloaded work, which points to interesting future research.
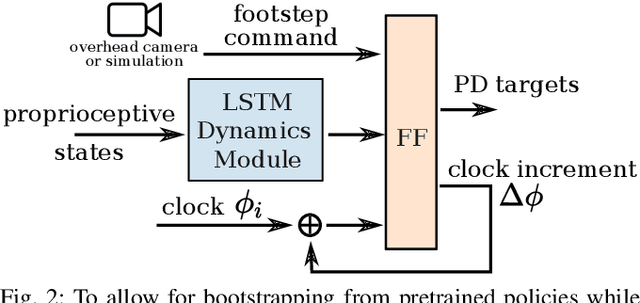
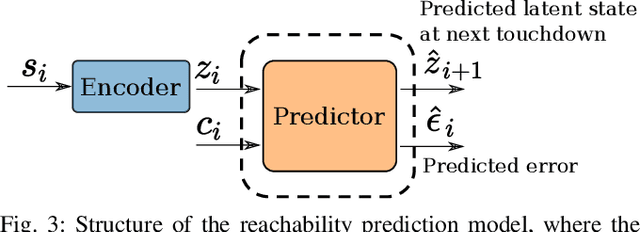
Sim-to-Real Learning of Footstep-Constrained Bipedal Dynamic Walking
Mar 15, 2022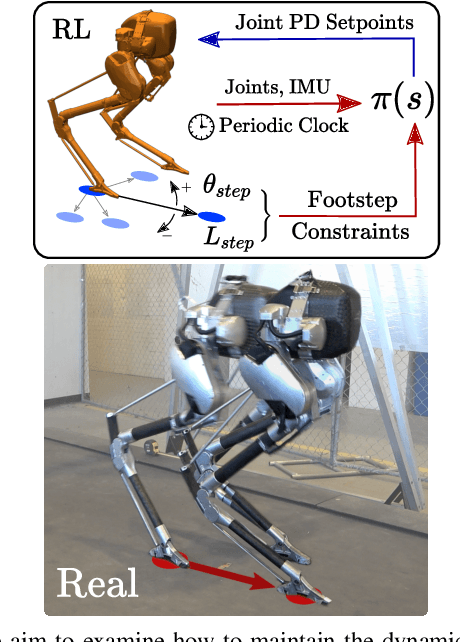
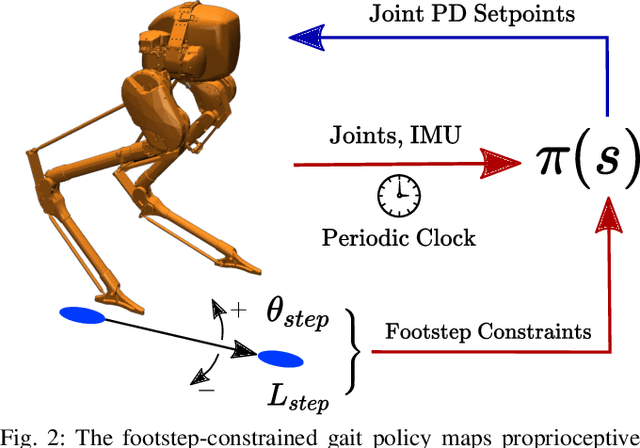
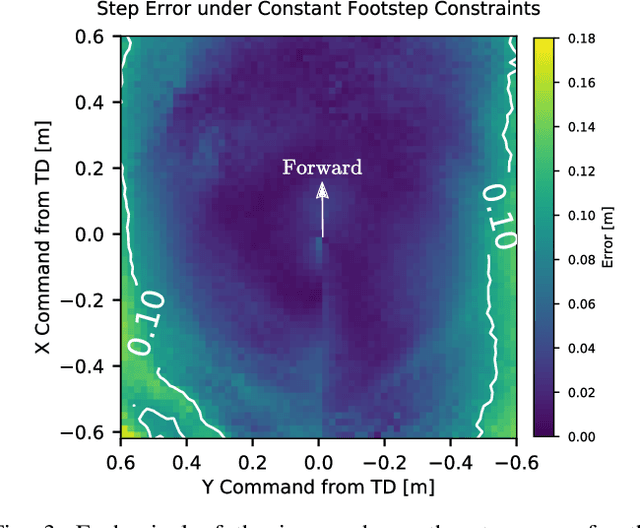
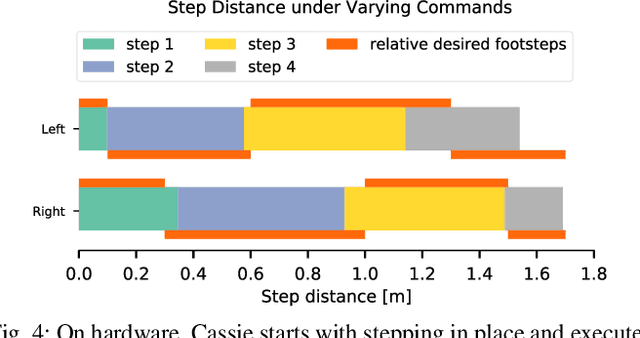
Recently, work on reinforcement learning (RL) for bipedal robots has successfully learned controllers for a variety of dynamic gaits with robust sim-to-real demonstrations. In order to maintain balance, the learned controllers have full freedom of where to place the feet, resulting in highly robust gaits. In the real world however, the environment will often impose constraints on the feasible footstep locations, typically identified by perception systems. Unfortunately, most demonstrated RL controllers on bipedal robots do not allow for specifying and responding to such constraints. This missing control interface greatly limits the real-world application of current RL controllers. In this paper, we aim to maintain the robust and dynamic nature of learned gaits while also respecting footstep constraints imposed externally. We develop an RL formulation for training dynamic gait controllers that can respond to specified touchdown locations. We then successfully demonstrate simulation and sim-to-real performance on the bipedal robot Cassie. In addition, we use supervised learning to induce a transition model for accurately predicting the next touchdown locations that the controller can achieve given the robot's proprioceptive observations. This model paves the way for integrating the learned controller into a full-order robot locomotion planner that robustly satisfies both balance and environmental constraints.