 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNotes on stable learning with piecewise-linear basis functions
Apr 25, 2018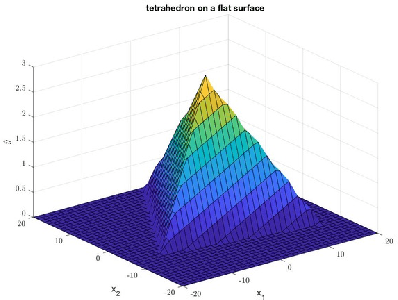
We discuss technical results on learning function approximations using piecewise-linear basis functions, and analyze their stability and convergence using nonlinear contraction theory.
Linear Matrix Inequalities for Physically-Consistent Inertial Parameter Identification: A Statistical Perspective on the Mass Distribution
Sep 18, 2017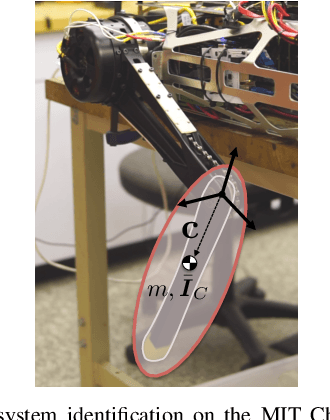
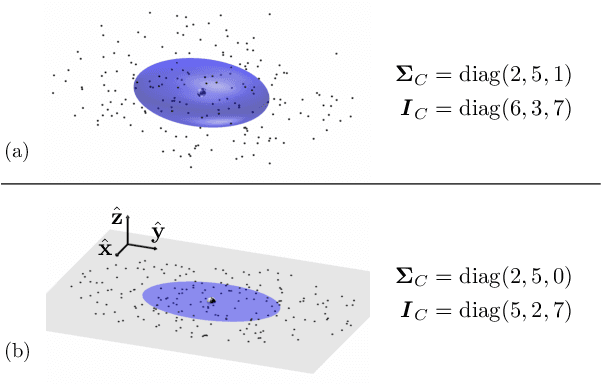
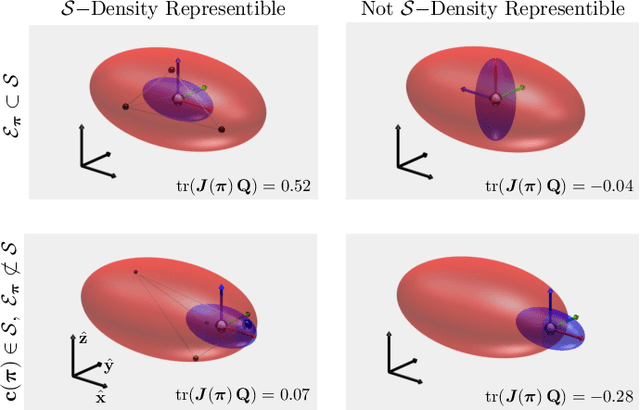
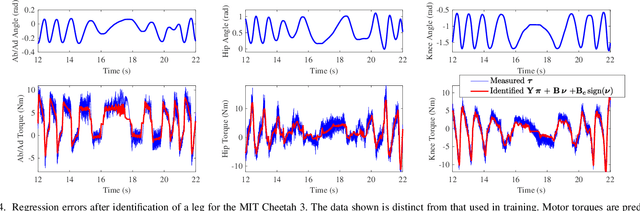
With the increased application of model-based whole-body control in legged robots, there has been a resurgence of research interest into methods for accurate system identification. An important class of methods focuses on the inertial parameters of rigid-body systems. These parameters consist of the mass, first mass moment (related to center of mass location), and rotational inertia matrix of each link. The main contribution of this paper is to formulate physical-consistency constraints on these parameters as Linear Matrix Inequalities (LMIs). The use of these constraints in identification can accelerate convergence and increase robustness to noisy data. It is critically observed that the proposed LMIs are expressed in terms of the covariance of the mass distribution, rather than its rotational moments of inertia. With this perspective, connections to the classical problem of moments in mathematics are shown to yield new bounding-volume constraints on the mass distribution of each link. While previous work ensured physical plausibility or used convex optimization in identification, the LMIs here uniquely enable both advantages. Constraints are applied to identification of a leg for the MIT Cheetah 3 robot. Detailed properties of transmission components are identified alongside link inertias, with parameter optimization carried out to global optimality through semidefinite programming.
Analytical SLAM Without Linearization
Dec 29, 2016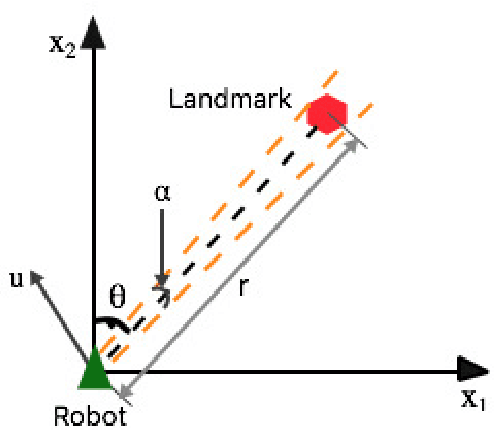
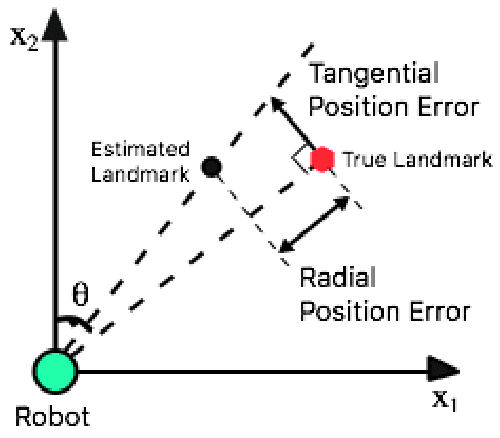
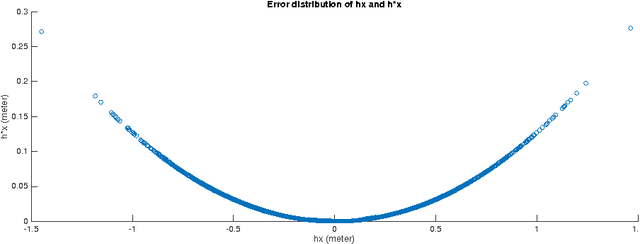
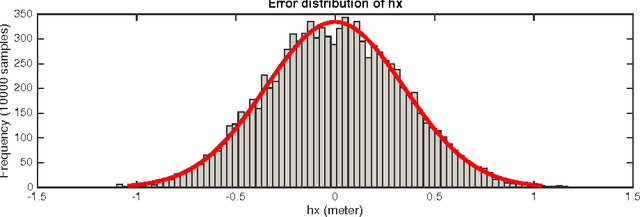
This paper solves the classical problem of simultaneous localization and mapping (SLAM) in a fashion which avoids linearized approximations altogether. Based on creating virtual synthetic measurements, the algorithm uses a linear time- varying (LTV) Kalman observer, bypassing errors and approximations brought by the linearization process in traditional extended Kalman filtering (EKF) SLAM. Convergence rates of the algorithm are established using contraction analysis. Different combinations of sensor information can be exploited, such as bearing measurements, range measurements, optical flow, or time-to-contact. As illustrated in simulations, the proposed algorithm can solve SLAM problems in both 2D and 3D scenarios with guaranteed convergence rates in a full nonlinear context.
A Quorum Sensing Inspired Algorithm for Dynamic Clustering
Oct 06, 2015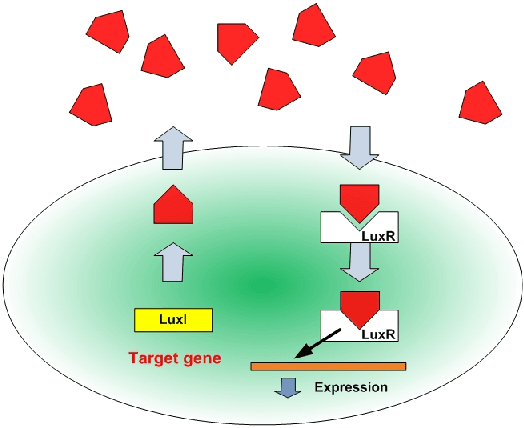
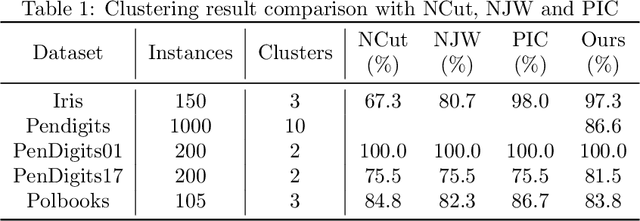
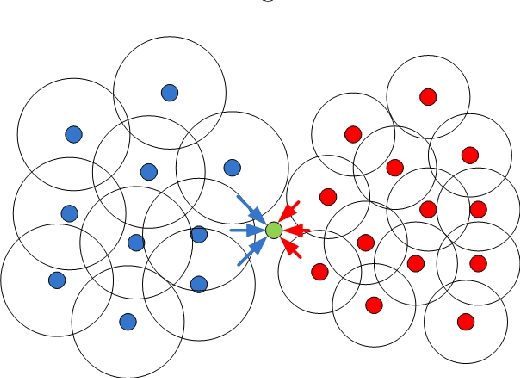
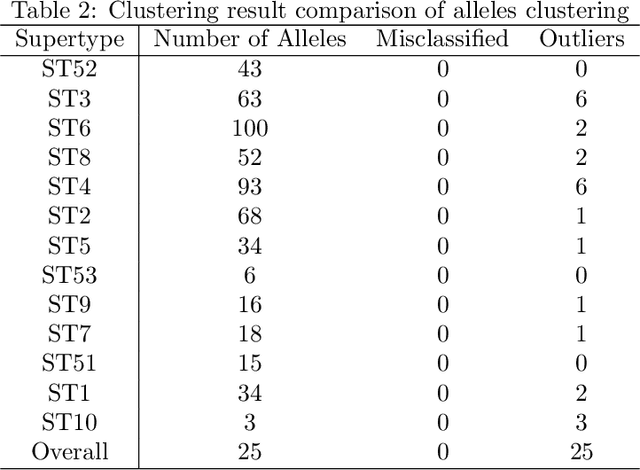
Quorum sensing is a decentralized biological process, through which a community of cells with no global awareness coordinate their functional behaviors based solely on cell-medium interactions and local decisions. This paper draws inspirations from quorum sensing and colony competition to derive a new algorithm for data clustering. The algorithm treats each data as a single cell, and uses knowledge of local connectivity to cluster cells into multiple colonies simultaneously. It simulates auto-inducers secretion in quorum sensing to tune the influence radius for each cell. At the same time, sparsely distributed core cells spread their influences to form colonies, and interactions between colonies eventually determine each cell's identity. The algorithm has the flexibility to analyze not only static but also time-varying data, which surpasses the capacity of many existing algorithms. Its stability and convergence properties are established. The algorithm is tested on several applications, including both synthetic and real benchmarks data sets, alleles clustering, community detection, image segmentation. In particular, the algorithm's distinctive capability to deal with time-varying data allows us to experiment it on novel applications such as robotic swarms grouping and switching model identification. We believe that the algorithm's promising performance would stimulate many more exciting applications.
Synchronization and quorum sensing in a swarm of humanoid robots
May 27, 2013
With the advent of inexpensive simple humanoid robots, new classes of robotic questions can be considered experimentally. One of these is collective behavior of groups of humanoid robots, and in particular robot synchronization and swarming. The goal of this work is to robustly synchronize a group of humanoid robots, and to demonstrate the approach experimentally on a choreography of 8 robots. We aim to be robust to network latencies, and to allow robots to join or leave the group at any time (for example a fallen robot should be able to stand up to rejoin the choreography). Contraction theory is used to allow each robot in the group to synchronize to a common virtual oscillator, and quorum sensing strategies are exploited to fit within the available bandwidth. The humanoids used are Nao's, developed by Aldebaran Robotics.
Multiclass Learning with Simplex Coding
Sep 14, 2012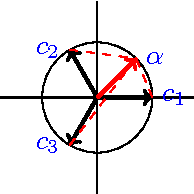
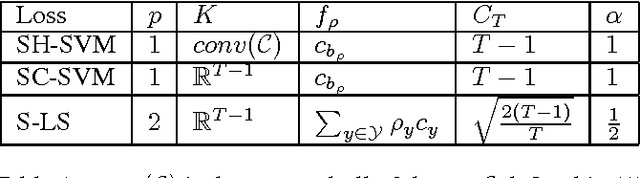
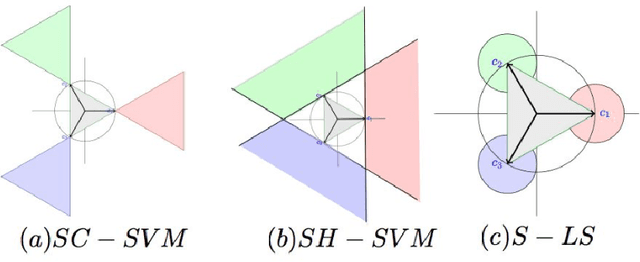
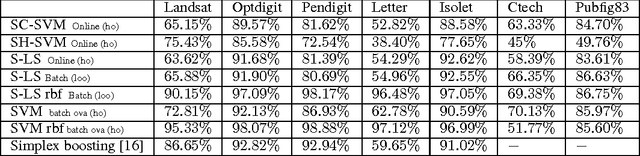
In this paper we discuss a novel framework for multiclass learning, defined by a suitable coding/decoding strategy, namely the simplex coding, that allows to generalize to multiple classes a relaxation approach commonly used in binary classification. In this framework, a relaxation error analysis can be developed avoiding constraints on the considered hypotheses class. Moreover, we show that in this setting it is possible to derive the first provably consistent regularized method with training/tuning complexity which is independent to the number of classes. Tools from convex analysis are introduced that can be used beyond the scope of this paper.
Competition through selective inhibitory synchrony
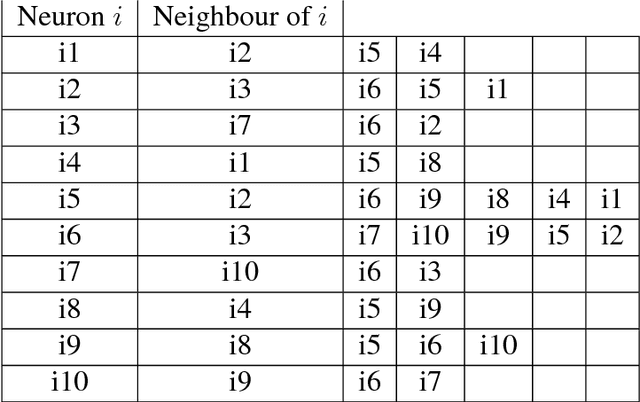
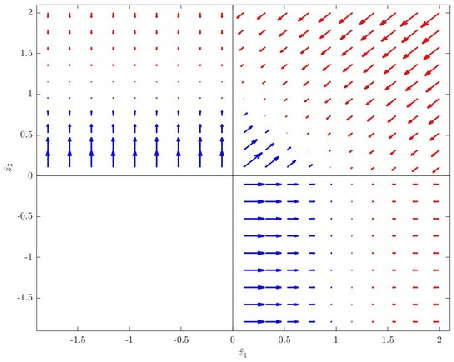
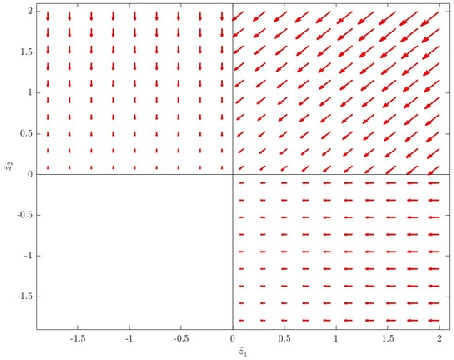
Apr 03, 2012Models of cortical neuronal circuits commonly depend on inhibitory feedback to control gain, provide signal normalization, and to selectively amplify signals using winner-take-all (WTA) dynamics. Such models generally assume that excitatory and inhibitory neurons are able to interact easily, because their axons and dendrites are co-localized in the same small volume. However, quantitative neuroanatomical studies of the dimensions of axonal and dendritic trees of neurons in the neocortex show that this co-localization assumption is not valid. In this paper we describe a simple modification to the WTA circuit design that permits the effects of distributed inhibitory neurons to be coupled through synchronization, and so allows a single WTA to be distributed widely in cortical space, well beyond the arborization of any single inhibitory neuron, and even across different cortical areas. We prove by non-linear contraction analysis, and demonstrate by simulation that distributed WTA sub-systems combined by such inhibitory synchrony are inherently stable. We show analytically that synchronization is substantially faster than winner selection. This circuit mechanism allows networks of independent WTAs to fully or partially compete with each other.
* in press at Neural computation; 4 figures
Collective stability of networks of winner-take-all circuits
May 16, 2011The neocortex has a remarkably uniform neuronal organization, suggesting that common principles of processing are employed throughout its extent. In particular, the patterns of connectivity observed in the superficial layers of the visual cortex are consistent with the recurrent excitation and inhibitory feedback required for cooperative-competitive circuits such as the soft winner-take-all (WTA). WTA circuits offer interesting computational properties such as selective amplification, signal restoration, and decision making. But, these properties depend on the signal gain derived from positive feedback, and so there is a critical trade-off between providing feedback strong enough to support the sophisticated computations, while maintaining overall circuit stability. We consider the question of how to reason about stability in very large distributed networks of such circuits. We approach this problem by approximating the regular cortical architecture as many interconnected cooperative-competitive modules. We demonstrate that by properly understanding the behavior of this small computational module, one can reason over the stability and convergence of very large networks composed of these modules. We obtain parameter ranges in which the WTA circuit operates in a high-gain regime, is stable, and can be aggregated arbitrarily to form large stable networks. We use nonlinear Contraction Theory to establish conditions for stability in the fully nonlinear case, and verify these solutions using numerical simulations. The derived bounds allow modes of operation in which the WTA network is multi-stable and exhibits state-dependent persistent activities. Our approach is sufficiently general to reason systematically about the stability of any network, biological or technological, composed of networks of small modules that express competition through shared inhibition.
* 7 Figures
Synchronization and Redundancy: Implications for Robustness of Neural Learning and Decision Making
Apr 16, 2011Learning and decision making in the brain are key processes critical to survival, and yet are processes implemented by non-ideal biological building blocks which can impose significant error. We explore quantitatively how the brain might cope with this inherent source of error by taking advantage of two ubiquitous mechanisms, redundancy and synchronization. In particular we consider a neural process whose goal is to learn a decision function by implementing a nonlinear gradient dynamics. The dynamics, however, are assumed to be corrupted by perturbations modeling the error which might be incurred due to limitations of the biology, intrinsic neuronal noise, and imperfect measurements. We show that error, and the associated uncertainty surrounding a learned solution, can be controlled in large part by trading off synchronization strength among multiple redundant neural systems against the noise amplitude. The impact of the coupling between such redundant systems is quantified by the spectrum of the network Laplacian, and we discuss the role of network topology in synchronization and in reducing the effect of noise. A range of situations in which the mechanisms we model arise in brain science are discussed, and we draw attention to experimental evidence suggesting that cortical circuits capable of implementing the computations of interest here can be found on several scales. Finally, simulations comparing theoretical bounds to the relevant empirical quantities show that the theoretical estimates we derive can be tight.
Audio Classification from Time-Frequency Texture
Sep 25, 2008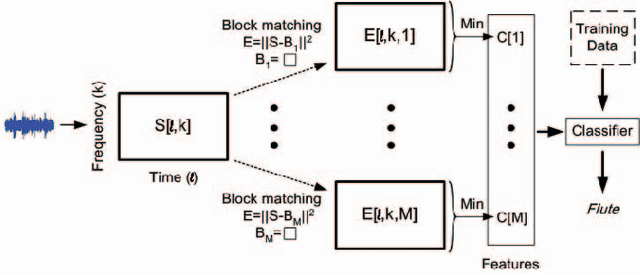

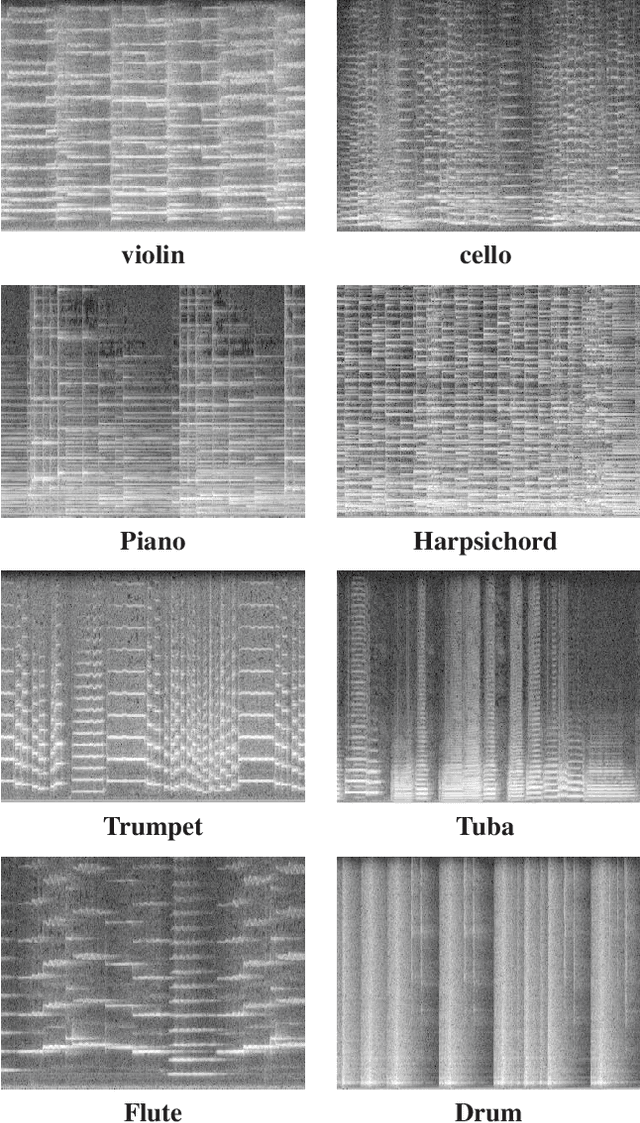
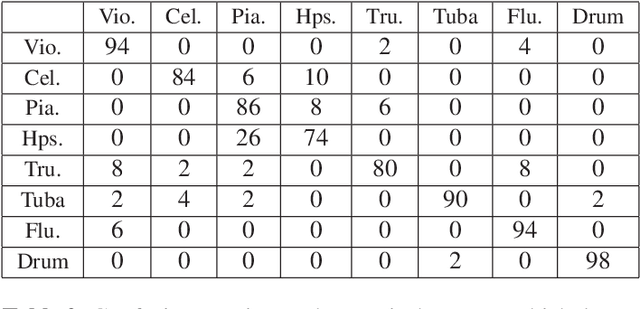
Time-frequency representations of audio signals often resemble texture images. This paper derives a simple audio classification algorithm based on treating sound spectrograms as texture images. The algorithm is inspired by an earlier visual classification scheme particularly efficient at classifying textures. While solely based on time-frequency texture features, the algorithm achieves surprisingly good performance in musical instrument classification experiments.