 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKernel Methods for the Approximation of Some Key Quantities of Nonlinear Systems
Mar 31, 2016We introduce a data-based approach to estimating key quantities which arise in the study of nonlinear control systems and random nonlinear dynamical systems. Our approach hinges on the observation that much of the existing linear theory may be readily extended to nonlinear systems - with a reasonable expectation of success - once the nonlinear system has been mapped into a high or infinite dimensional feature space. In particular, we develop computable, non-parametric estimators approximating controllability and observability energy functions for nonlinear systems, and study the ellipsoids they induce. In all cases the relevant quantities are estimated from simulated or observed data. It is then shown that the controllability energy estimator provides a key means for approximating the invariant measure of an ergodic, stochastically forced nonlinear system.
Kernel Methods for the Approximation of Nonlinear Systems
Mar 31, 2016
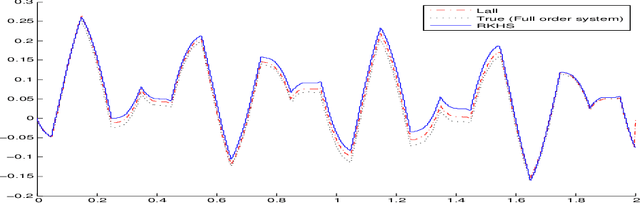
We introduce a data-driven order reduction method for nonlinear control systems, drawing on recent progress in machine learning and statistical dimensionality reduction. The method rests on the assumption that the nonlinear system behaves linearly when lifted into a high (or infinite) dimensional feature space where balanced truncation may be carried out implicitly. This leads to a nonlinear reduction map which can be combined with a representation of the system belonging to a reproducing kernel Hilbert space to give a closed, reduced order dynamical system which captures the essential input-output characteristics of the original model. Empirical simulations illustrating the approach are also provided.
Multiscale Markov Decision Problems: Compression, Solution, and Transfer Learning
Dec 05, 2012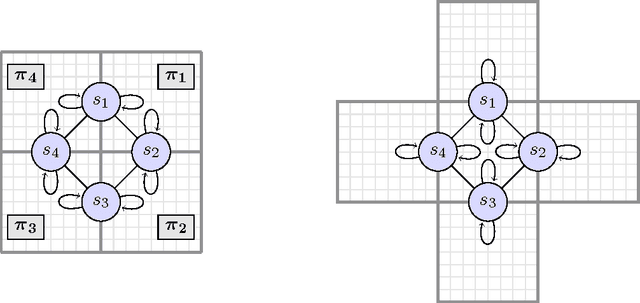
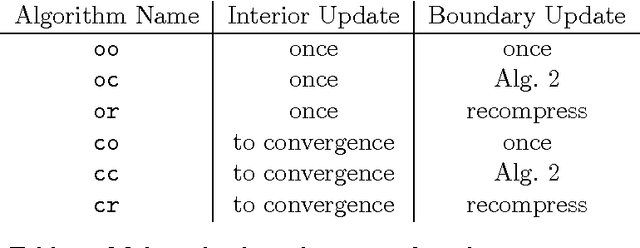
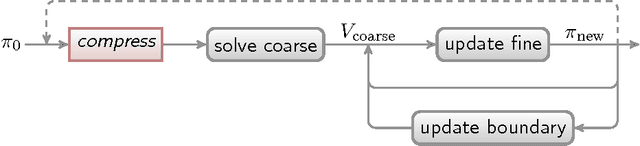
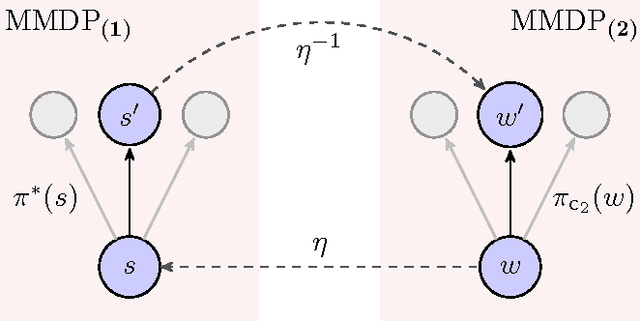
Many problems in sequential decision making and stochastic control often have natural multiscale structure: sub-tasks are assembled together to accomplish complex goals. Systematically inferring and leveraging hierarchical structure, particularly beyond a single level of abstraction, has remained a longstanding challenge. We describe a fast multiscale procedure for repeatedly compressing, or homogenizing, Markov decision processes (MDPs), wherein a hierarchy of sub-problems at different scales is automatically determined. Coarsened MDPs are themselves independent, deterministic MDPs, and may be solved using existing algorithms. The multiscale representation delivered by this procedure decouples sub-tasks from each other and can lead to substantial improvements in convergence rates both locally within sub-problems and globally across sub-problems, yielding significant computational savings. A second fundamental aspect of this work is that these multiscale decompositions yield new transfer opportunities across different problems, where solutions of sub-tasks at different levels of the hierarchy may be amenable to transfer to new problems. Localized transfer of policies and potential operators at arbitrary scales is emphasized. Finally, we demonstrate compression and transfer in a collection of illustrative domains, including examples involving discrete and continuous statespaces.
Synchronization and Redundancy: Implications for Robustness of Neural Learning and Decision Making
Apr 16, 2011Learning and decision making in the brain are key processes critical to survival, and yet are processes implemented by non-ideal biological building blocks which can impose significant error. We explore quantitatively how the brain might cope with this inherent source of error by taking advantage of two ubiquitous mechanisms, redundancy and synchronization. In particular we consider a neural process whose goal is to learn a decision function by implementing a nonlinear gradient dynamics. The dynamics, however, are assumed to be corrupted by perturbations modeling the error which might be incurred due to limitations of the biology, intrinsic neuronal noise, and imperfect measurements. We show that error, and the associated uncertainty surrounding a learned solution, can be controlled in large part by trading off synchronization strength among multiple redundant neural systems against the noise amplitude. The impact of the coupling between such redundant systems is quantified by the spectrum of the network Laplacian, and we discuss the role of network topology in synchronization and in reducing the effect of noise. A range of situations in which the mechanisms we model arise in brain science are discussed, and we draw attention to experimental evidence suggesting that cortical circuits capable of implementing the computations of interest here can be found on several scales. Finally, simulations comparing theoretical bounds to the relevant empirical quantities show that the theoretical estimates we derive can be tight.
Balanced Reduction of Nonlinear Control Systems in Reproducing Kernel Hilbert Space
Nov 12, 2010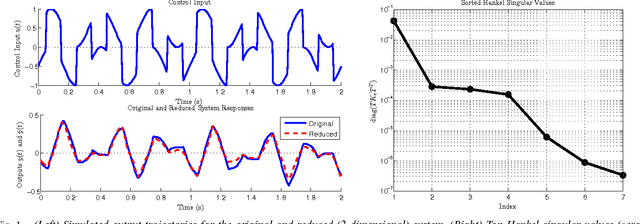
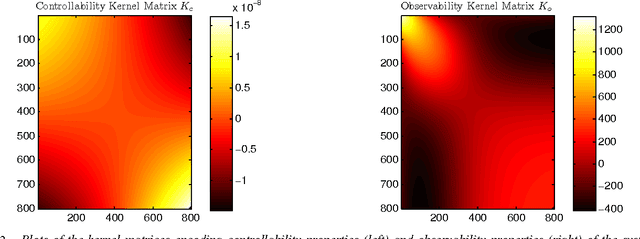
We introduce a novel data-driven order reduction method for nonlinear control systems, drawing on recent progress in machine learning and statistical dimensionality reduction. The method rests on the assumption that the nonlinear system behaves linearly when lifted into a high (or infinite) dimensional feature space where balanced truncation may be carried out implicitly. This leads to a nonlinear reduction map which can be combined with a representation of the system belonging to a reproducing kernel Hilbert space to give a closed, reduced order dynamical system which captures the essential input-output characteristics of the original model. Empirical simulations illustrating the approach are also provided.