 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-PiT: Enhancing Structural Coherence in Part-Based Image Synthesis via Graph Priors
Apr 07, 2026Achieving fine-grained and structurally sound controllability is a cornerstone of advanced visual generation. Existing part-based frameworks treat user-provided parts as an unordered set and therefore ignore their intrinsic spatial and semantic relationships, which often results in compositions that lack structural integrity. To bridge this gap, we propose Graph-PiT, a framework that explicitly models the structural dependencies of visual components using a graph prior. Specifically, we represent visual parts as nodes and their spatial-semantic relationships as edges. At the heart of our method is a Hierarchical Graph Neural Network (HGNN) module that performs bidirectional message passing between coarse-grained part-level super-nodes and fine-grained IP+ token sub-nodes, refining part embeddings before they enter the generative pipeline. We also introduce a graph Laplacian smoothness loss and an edge-reconstruction loss so that adjacent parts acquire compatible, relation-aware embeddings. Quantitative experiments on controlled synthetic domains (character, product, indoor layout, and jigsaw), together with qualitative transfer to real web images, show that Graph-PiT improves structural coherence over vanilla PiT while remaining compatible with the original IP-Prior pipeline. Ablation experiments confirm that explicit relational reasoning is crucial for enforcing user-specified adjacency constraints. Our approach not only enhances the plausibility of generated concepts but also offers a scalable and interpretable mechanism for complex, multi-part image synthesis. The code is available at https://github.com/wolf-bailang/Graph-PiT.
HigeNet: A Highly Efficient Modeling for Long Sequence Time Series Prediction in AIOps
Nov 13, 2022



Modern IT system operation demands the integration of system software and hardware metrics. As a result, it generates a massive amount of data, which can be potentially used to make data-driven operational decisions. In the basic form, the decision model needs to monitor a large set of machine data, such as CPU utilization, allocated memory, disk and network latency, and predicts the system metrics to prevent performance degradation. Nevertheless, building an effective prediction model in this scenario is rather challenging as the model has to accurately capture the long-range coupling dependency in the Multivariate Time-Series (MTS). Moreover, this model needs to have low computational complexity and can scale efficiently to the dimension of data available. In this paper, we propose a highly efficient model named HigeNet to predict the long-time sequence time series. We have deployed the HigeNet on production in the D-matrix platform. We also provide offline evaluations on several publicly available datasets as well as one online dataset to demonstrate the model's efficacy. The extensive experiments show that training time, resource usage and accuracy of the model are found to be significantly better than five state-of-the-art competing models.
Analytical SLAM Without Linearization
Dec 29, 2016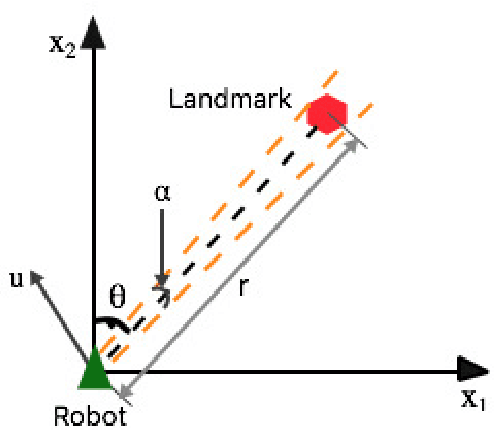
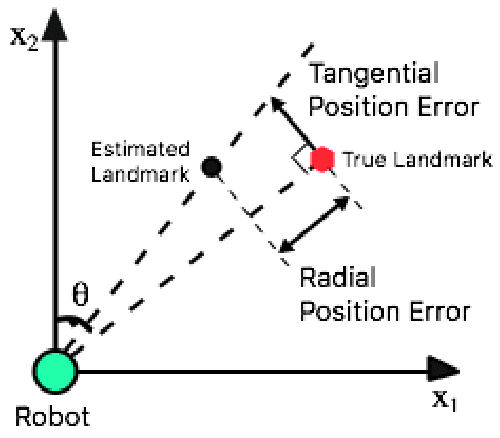
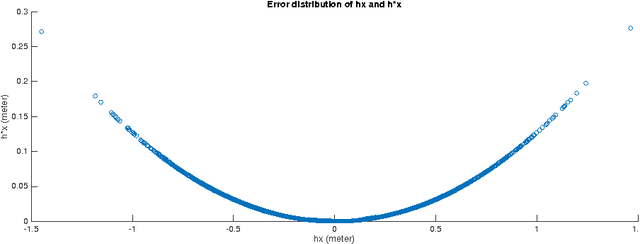
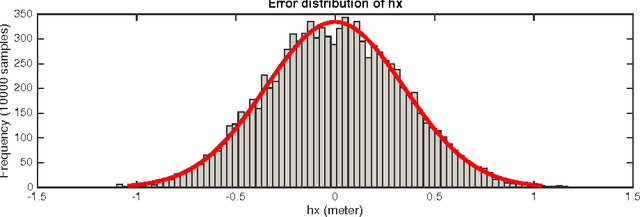
This paper solves the classical problem of simultaneous localization and mapping (SLAM) in a fashion which avoids linearized approximations altogether. Based on creating virtual synthetic measurements, the algorithm uses a linear time- varying (LTV) Kalman observer, bypassing errors and approximations brought by the linearization process in traditional extended Kalman filtering (EKF) SLAM. Convergence rates of the algorithm are established using contraction analysis. Different combinations of sensor information can be exploited, such as bearing measurements, range measurements, optical flow, or time-to-contact. As illustrated in simulations, the proposed algorithm can solve SLAM problems in both 2D and 3D scenarios with guaranteed convergence rates in a full nonlinear context.
A Quorum Sensing Inspired Algorithm for Dynamic Clustering
Oct 06, 2015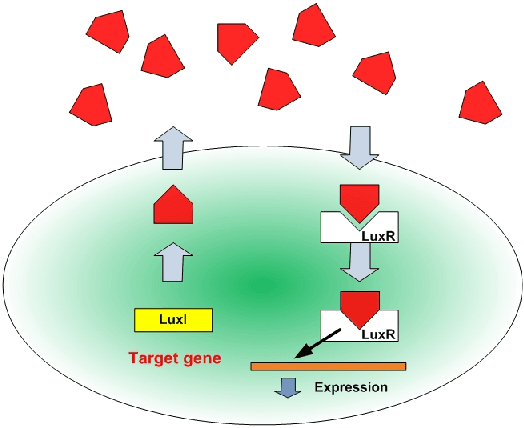
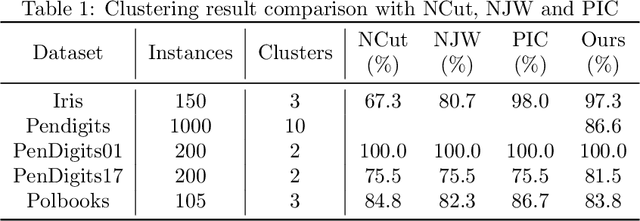
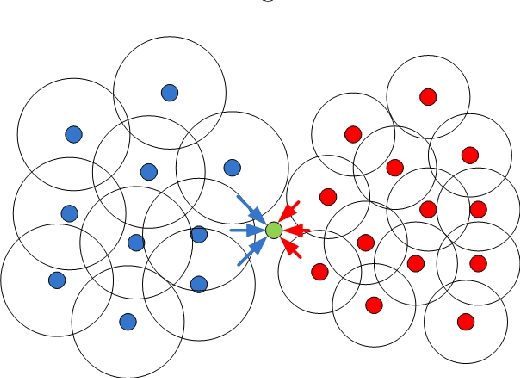
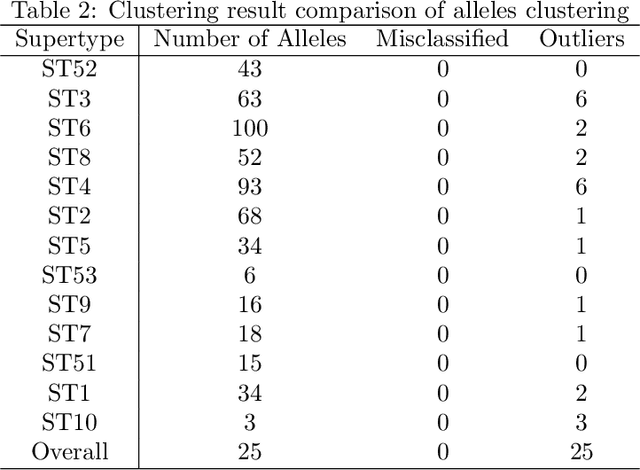
Quorum sensing is a decentralized biological process, through which a community of cells with no global awareness coordinate their functional behaviors based solely on cell-medium interactions and local decisions. This paper draws inspirations from quorum sensing and colony competition to derive a new algorithm for data clustering. The algorithm treats each data as a single cell, and uses knowledge of local connectivity to cluster cells into multiple colonies simultaneously. It simulates auto-inducers secretion in quorum sensing to tune the influence radius for each cell. At the same time, sparsely distributed core cells spread their influences to form colonies, and interactions between colonies eventually determine each cell's identity. The algorithm has the flexibility to analyze not only static but also time-varying data, which surpasses the capacity of many existing algorithms. Its stability and convergence properties are established. The algorithm is tested on several applications, including both synthetic and real benchmarks data sets, alleles clustering, community detection, image segmentation. In particular, the algorithm's distinctive capability to deal with time-varying data allows us to experiment it on novel applications such as robotic swarms grouping and switching model identification. We believe that the algorithm's promising performance would stimulate many more exciting applications.