 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCROSS-GAiT: Cross-Attention-Based Multimodal Representation Fusion for Parametric Gait Adaptation in Complex Terrains
Sep 25, 2024



We present CROSS-GAiT, a novel algorithm for quadruped robots that uses Cross Attention to fuse terrain representations derived from visual and time-series inputs, including linear accelerations, angular velocities, and joint efforts. These fused representations are used to adjust the robot's step height and hip splay, enabling adaptive gaits that respond dynamically to varying terrain conditions. We generate these terrain representations by processing visual inputs through a masked Vision Transformer (ViT) encoder and time-series data through a dilated causal convolutional encoder. The cross-attention mechanism then selects and integrates the most relevant features from each modality, combining terrain characteristics with robot dynamics for better-informed gait adjustments. CROSS-GAiT uses the combined representation to dynamically adjust gait parameters in response to varying and unpredictable terrains. We train CROSS-GAiT on data from diverse terrains, including asphalt, concrete, brick pavements, grass, dense vegetation, pebbles, gravel, and sand. Our algorithm generalizes well and adapts to unseen environmental conditions, enhancing real-time navigation performance. CROSS-GAiT was implemented on a Ghost Robotics Vision 60 robot and extensively tested in complex terrains with high vegetation density, uneven/unstable surfaces, sand banks, deformable substrates, etc. We observe at least a 7.04% reduction in IMU energy density and a 27.3% reduction in total joint effort, which directly correlates with increased stability and reduced energy usage when compared to state-of-the-art methods. Furthermore, CROSS-GAiT demonstrates at least a 64.5% increase in success rate and a 4.91% reduction in time to reach the goal in four complex scenarios. Additionally, the learned representations perform 4.48% better than the state-of-the-art on a terrain classification task.
VERN: Vegetation-aware Robot Navigation in Dense Unstructured Outdoor Environments
Mar 25, 2023We propose a novel method for autonomous legged robot navigation in densely vegetated environments with a variety of pliable/traversable and non-pliable/untraversable vegetation. We present a novel few-shot learning classifier that can be trained on a few hundred RGB images to differentiate flora that can be navigated through, from the ones that must be circumvented. Using the vegetation classification and 2D lidar scans, our method constructs a vegetation-aware traversability cost map that accurately represents the pliable and non-pliable obstacles with lower, and higher traversability costs, respectively. Our cost map construction accounts for misclassifications of the vegetation and further lowers the risk of collisions, freezing and entrapment in vegetation during navigation. Furthermore, we propose holonomic recovery behaviors for the robot for scenarios where it freezes, or gets physically entrapped in dense, pliable vegetation. We demonstrate our method on a Boston Dynamics Spot robot in real-world unstructured environments with sparse and dense tall grass, bushes, trees, etc. We observe an increase of 25-90% in success rates, 10-90% decrease in freezing rate, and up to 65% decrease in the false positive rate compared to existing methods.
Switching between Limit Cycles in a Model of Running Using Exponentially Stabilizing Discrete Control Lyapunov Function
Jul 07, 2018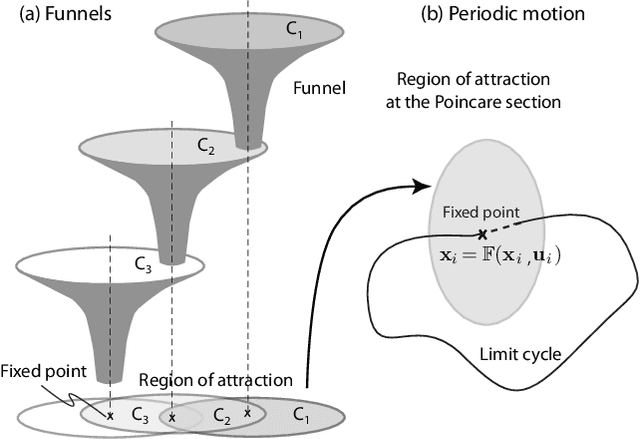
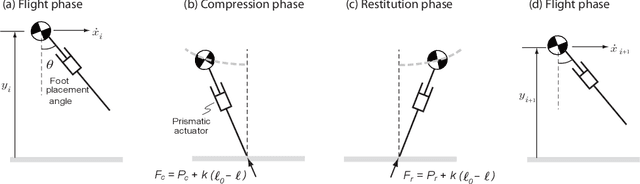
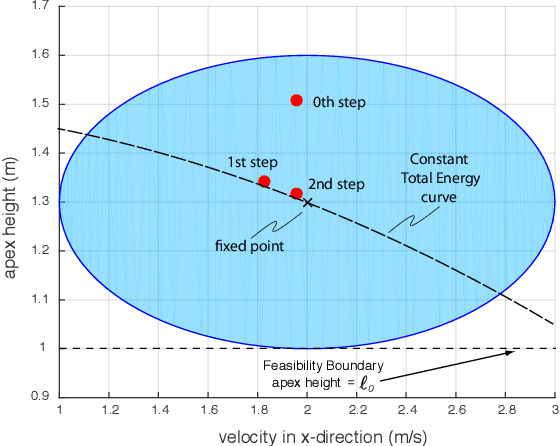
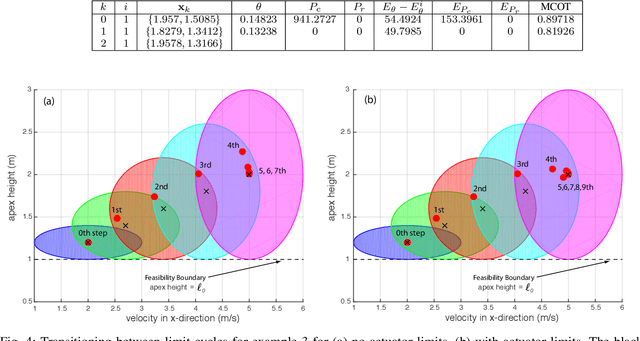
This paper considers the problem of switching between two periodic motions, also known as limit cycles, to create agile running motions. For each limit cycle, we use a control Lyapunov function to estimate the region of attraction at the apex of the flight phase. We switch controllers at the apex, only if the current state of the robot is within the region of attraction of the subsequent limit cycle. If the intersection between two limit cycles is the null set, then we construct additional limit cycles till we are able to achieve sufficient overlap of the region of attraction between sequential limit cycles. Additionally, we impose an exponential convergence condition on the control Lyapunov function that allows us to rapidly transition between limit cycles. Using the approach we demonstrate switching between 5 limit cycles in about 5 steps with the speed changing from 2 m/s to 5 m/s.