 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Control using Control Lyapunov Function and Hamilton-Jacobi Reachability
Apr 08, 2024



The paper presents a robust control technique that combines the Control Lyapunov function and Hamilton-Jacobi Reachability to compute a controller and its Region of Attraction (ROA). The Control Lyapunov function uses a linear system model with an assumed additive uncertainty to calculate a control gain and the level sets of the ROA as a function of the uncertainty. Next, Hamilton-Jacobi reachability uses the nonlinear model with the modeled uncertainty, which need not be additive, to compute the backward reachable set (BRS). Finally, by juxtaposing the level sets of the ROA with BRS, we can calculate the worst-case additive disturbance and the ROA of the nonlinear model. We illustrate our approach on a 2D quadcopter tracking trajectory and a 2D quadcopter with height and velocity regulation in simulation.
Cooperative Multi-Agent Planning Framework for Fuel Constrained UAV-UGV Routing Problem
Sep 06, 2023Unmanned Aerial Vehicles (UAVs), although adept at aerial surveillance, are often constrained by limited battery capacity. By refueling on slow-moving Unmanned Ground Vehicles (UGVs), their operational endurance can be significantly enhanced. This paper explores the computationally complex problem of cooperative UAV-UGV routing for vast area surveillance within the speed and fuel constraints, presenting a sequential multi-agent planning framework for achieving feasible and optimally satisfactory solutions. By considering the UAV fuel limits and utilizing a minimum set cover algorithm, we determine UGV refueling stops, which in turn facilitate UGV route planning at the first step and through a task allocation technique and energy constrained vehicle routing problem modeling with time windows (E-VRPTW) we achieve the UAV route at the second step of the framework. The effectiveness of our multi-agent strategy is demonstrated through the implementation on 30 different task scenarios across 3 different scales. This work offers significant insight into the collaborative advantages of UAV-UGV systems and introduces heuristic approaches to bypass computational challenges and swiftly reach high-quality solutions.
Solving Vehicle Routing Problem for unmanned heterogeneous vehicle systems using Asynchronous Multi-Agent Architecture (A-teams)
Mar 07, 2023



Fast moving but power hungry unmanned aerial vehicles (UAVs) can recharge on slow-moving unmanned ground vehicles (UGVs) to survey large areas in an effective and efficient manner. In order to solve this computationally challenging problem in a reasonable time, we created a two-level optimization heuristics. At the outer level, the UGV route is parameterized by few free parameters and at the inner level, the UAV route is solved by formulating and solving a vehicle routing problem with capacity constraints, time windows, and dropped visits. The UGV free parameters need to be optimized judiciously in order to create high quality solutions. We explore two methods for tuning the free UGV parameters: (1) a genetic algorithm, and (2) Asynchronous Multi-agent architecture (Ateams). The A-teams uses multiple agents to create, improve, and destroy solutions. The parallel asynchronous architecture enables A-teams to quickly optimize the parameters. Our results on test cases show that the A-teams produces similar solutions as genetic algorithm but with a speed up of 2-3 times.
Switching between Limit Cycles in a Model of Running Using Exponentially Stabilizing Discrete Control Lyapunov Function
Jul 07, 2018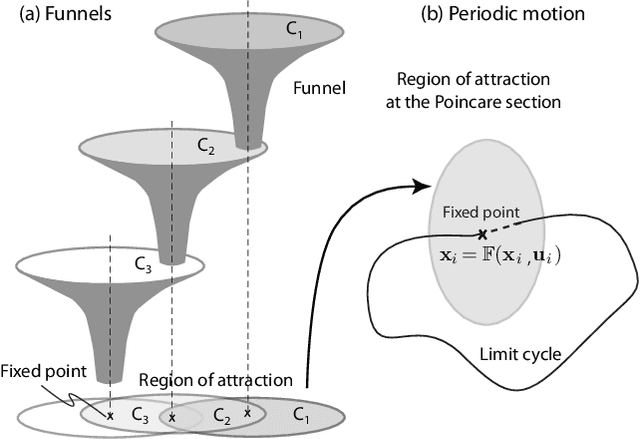
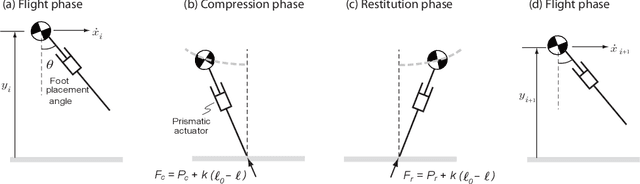
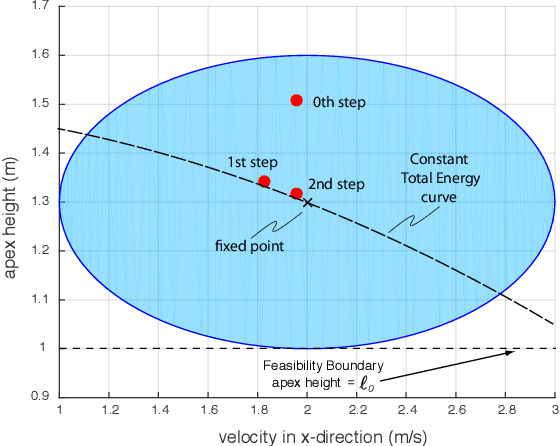
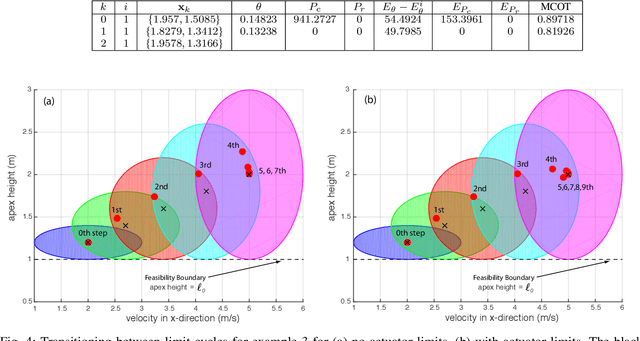
This paper considers the problem of switching between two periodic motions, also known as limit cycles, to create agile running motions. For each limit cycle, we use a control Lyapunov function to estimate the region of attraction at the apex of the flight phase. We switch controllers at the apex, only if the current state of the robot is within the region of attraction of the subsequent limit cycle. If the intersection between two limit cycles is the null set, then we construct additional limit cycles till we are able to achieve sufficient overlap of the region of attraction between sequential limit cycles. Additionally, we impose an exponential convergence condition on the control Lyapunov function that allows us to rapidly transition between limit cycles. Using the approach we demonstrate switching between 5 limit cycles in about 5 steps with the speed changing from 2 m/s to 5 m/s.