 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBack to the Beginning of Heuristic Design: Bridging Code and Knowledge with LLMs
May 07, 2026Large language models (LLMs) have recently advanced automatic heuristic design (AHD) for combinatorial optimization (CO), where candidate heuristics are iteratively proposed, evaluated, and refined. Most existing approaches search over executable programs and distill insights from execution feedback to guide later iterations. Because this process moves from low-level implementations to high-level principles, we refer to it as a bottom-up paradigm. We argue that this view is incomplete and introduce a complementary top-down perspective: knowledge becomes the primary search object and code merely instantiates and tests it, making what is learned explicit and reusable across problems and trajectories. We formalize this shift through a statistical-learning view that exposes a distortion--compression trade-off, and instantiate it in both population-based and tree-based AHD frameworks. Across CO and tasks beyond it, knowledge-first search improves discovery efficiency, transfer, and generalization, often outperforming code-centric pipelines, while combining both strategies yields further gains. Our results suggest that progress in AHD depends on iteratively constructing and evolving interpretable hypotheses that retain value beyond a single search trajectory.
MMP-A*: Multimodal Perception Enhanced Incremental Heuristic Search on Path Planning
Jan 05, 2026Autonomous path planning requires a synergy between global reasoning and geometric precision, especially in complex or cluttered environments. While classical A* is valued for its optimality, it incurs prohibitive computational and memory costs in large-scale scenarios. Recent attempts to mitigate these limitations by using Large Language Models for waypoint guidance remain insufficient, as they rely only on text-based reasoning without spatial grounding. As a result, such models often produce incorrect waypoints in topologically complex environments with dead ends, and lack the perceptual capacity to interpret ambiguous physical boundaries. These inconsistencies lead to costly corrective expansions and undermine the intended computational efficiency. We introduce MMP-A*, a multimodal framework that integrates the spatial grounding capabilities of vision-language models with a novel adaptive decay mechanism. By anchoring high-level reasoning in physical geometry, the framework produces coherent waypoint guidance that addresses the limitations of text-only planners. The adaptive decay mechanism dynamically regulates the influence of uncertain waypoints within the heuristic, ensuring geometric validity while substantially reducing memory overhead. To evaluate robustness, we test the framework in challenging environments characterized by severe clutter and topological complexity. Experimental results show that MMP-A* achieves near-optimal trajectories with significantly reduced operational costs, demonstrating its potential as a perception-grounded and computationally efficient paradigm for autonomous navigation.
MOTIF: Multi-strategy Optimization via Turn-based Interactive Framework
Aug 05, 2025Designing effective algorithmic components remains a fundamental obstacle in tackling NP-hard combinatorial optimization problems (COPs), where solvers often rely on carefully hand-crafted strategies. Despite recent advances in using large language models (LLMs) to synthesize high-quality components, most approaches restrict the search to a single element - commonly a heuristic scoring function - thus missing broader opportunities for innovation. In this paper, we introduce a broader formulation of solver design as a multi-strategy optimization problem, which seeks to jointly improve a set of interdependent components under a unified objective. To address this, we propose Multi-strategy Optimization via Turn-based Interactive Framework (MOTIF) - a novel framework based on Monte Carlo Tree Search that facilitates turn-based optimization between two LLM agents. At each turn, an agent improves one component by leveraging the history of both its own and its opponent's prior updates, promoting both competitive pressure and emergent cooperation. This structured interaction broadens the search landscape and encourages the discovery of diverse, high-performing solutions. Experiments across multiple COP domains show that MOTIF consistently outperforms state-of-the-art methods, highlighting the promise of turn-based, multi-agent prompting for fully automated solver design.
Pareto-Grid-Guided Large Language Models for Fast and High-Quality Heuristics Design in Multi-Objective Combinatorial Optimization
Jul 28, 2025Multi-objective combinatorial optimization problems (MOCOP) frequently arise in practical applications that require the simultaneous optimization of conflicting objectives. Although traditional evolutionary algorithms can be effective, they typically depend on domain knowledge and repeated parameter tuning, limiting flexibility when applied to unseen MOCOP instances. Recently, integration of Large Language Models (LLMs) into evolutionary computation has opened new avenues for automatic heuristic generation, using their advanced language understanding and code synthesis capabilities. Nevertheless, most existing approaches predominantly focus on single-objective tasks, often neglecting key considerations such as runtime efficiency and heuristic diversity in multi-objective settings. To bridge this gap, we introduce Multi-heuristics for MOCOP via Pareto-Grid-guided Evolution of LLMs (MPaGE), a novel enhancement of the Simple Evolutionary Multiobjective Optimization (SEMO) framework that leverages LLMs and Pareto Front Grid (PFG) technique. By partitioning the objective space into grids and retaining top-performing candidates to guide heuristic generation, MPaGE utilizes LLMs to prioritize heuristics with semantically distinct logical structures during variation, thus promoting diversity and mitigating redundancy within the population. Through extensive evaluations, MPaGE demonstrates superior performance over existing LLM-based frameworks, and achieves competitive results to traditional Multi-objective evolutionary algorithms (MOEAs), with significantly faster runtime. Our code is available at: https://github.com/langkhachhoha/MPaGE.
Minimizing the energy depletion in wireless rechargeable sensor networks using bi-level metaheuristic charging schemes
May 22, 2025Recently, Wireless Rechargeable Sensor Networks (WRSNs) that leveraged the advantage of wireless energy transfer technology have opened a promising opportunity in solving the limited energy issue. However, an ineffective charging strategy may reduce the charging performance. Although many practical charging algorithms have been introduced, these studies mainly focus on optimizing the charging path with a fully charging approach. This approach may lead to the death of a series of sensors due to their extended charging latency. This paper introduces a novel partial charging approach that follows a bi-level optimized scheme to minimize energy depletion in WRSNs. We aim at optimizing simultaneously two factors: the charging path and time. To accomplish this, we first formulate a mathematical model of the investigated problem. We then propose two approximate algorithms in which the optimization of the charging path and the charging time are considered as the upper and lower level, respectively. The first algorithm combines a Multi-start Local Search method and a Genetic Algorithm to find a solution. The second algorithm adopts a nested approach that utilizes the advantages of the Multitasking and Covariance Matrix Adaptation Evolutionary Strategies. Experimental validations on various network scenarios demonstrate that our proposed algorithms outperform the existing works.
HSEvo: Elevating Automatic Heuristic Design with Diversity-Driven Harmony Search and Genetic Algorithm Using LLMs
Dec 19, 2024



Automatic Heuristic Design (AHD) is an active research area due to its utility in solving complex search and NP-hard combinatorial optimization problems in the real world. The recent advancements in Large Language Models (LLMs) introduce new possibilities by coupling LLMs with evolutionary computation to automatically generate heuristics, known as LLM-based Evolutionary Program Search (LLM-EPS). While previous LLM-EPS studies obtained great performance on various tasks, there is still a gap in understanding the properties of heuristic search spaces and achieving a balance between exploration and exploitation, which is a critical factor in large heuristic search spaces. In this study, we address this gap by proposing two diversity measurement metrics and perform an analysis on previous LLM-EPS approaches, including FunSearch, EoH, and ReEvo. Results on black-box AHD problems reveal that while EoH demonstrates higher diversity than FunSearch and ReEvo, its objective score is unstable. Conversely, ReEvo's reflection mechanism yields good objective scores but fails to optimize diversity effectively. With this finding in mind, we introduce HSEvo, an adaptive LLM-EPS framework that maintains a balance between diversity and convergence with a harmony search algorithm. Through experimentation, we find that HSEvo achieved high diversity indices and good objective scores while remaining cost-effective. These results underscore the importance of balancing exploration and exploitation and understanding heuristic search spaces in designing frameworks in LLM-EPS.
Active and Passive Beamforming Designs for SER Minimization in RIS-Assisted MIMO Systems
Oct 08, 2024This research exploits the applications of reconfigurable intelligent surface (RIS)-assisted multiple input multiple output (MIMO) systems, specifically addressing the enhancement of communication reliability with modulated signals. Specifically, we first derive the analytical downlink symbol error rate (SER) of each user as a multivariate function of both the phase-shift and beamforming vectors. The analytical SER enables us to obtain insights into the synergistic dynamics between the RIS and MIMO communication. We then introduce a novel average SER minimization problem subject to the practical constraints of the transmitted power budget and phase shift coefficients, which is NP-hard. By incorporating the differential evolution (DE) algorithm as a pivotal tool for optimizing the intricate active and passive beamforming variables in RIS-assisted communication systems, the non-convexity of the considered SER optimization problem can be effectively handled. Furthermore, an efficient local search is incorporated into the DE algorithm to overcome the local optimum, and hence offer low SER and high communication reliability. Monte Carlo simulations validate the analytical results and the proposed optimization framework, indicating that the joint active and passive beamforming design is superior to the other benchmarks.
Phase Shift Design for RIS-Aided Cell-Free Massive MIMO with Improved Differential Evolution
Aug 12, 2023

This paper proposes a novel phase shift design for cell-free massive multiple-input and multiple-output (MIMO) systems assisted by reconfigurable intelligent surface (RIS), which only utilizes channel statistics to achieve the uplink sum ergodic throughput maximization under spatial channel correlations. Due to the non-convexity and the scale of the derived optimization problem, we develop an improved version of the differential evolution (DE) algorithm. The proposed scheme is capable of providing high-quality solutions within reasonable computing time. Numerical results demonstrate superior improvements of the proposed phase shift designs over the other benchmarks, particularly in scenarios where direct links are highly probable.
HabiCrowd: A High Performance Simulator for Crowd-Aware Visual Navigation
Jun 20, 2023



Visual navigation, a foundational aspect of Embodied AI (E-AI), has been significantly studied in the past few years. While many 3D simulators have been introduced to support visual navigation tasks, scarcely works have been directed towards combining human dynamics, creating the gap between simulation and real-world applications. Furthermore, current 3D simulators incorporating human dynamics have several limitations, particularly in terms of computational efficiency, which is a promise of E-AI simulators. To overcome these shortcomings, we introduce HabiCrowd, the first standard benchmark for crowd-aware visual navigation that integrates a crowd dynamics model with diverse human settings into photorealistic environments. Empirical evaluations demonstrate that our proposed human dynamics model achieves state-of-the-art performance in collision avoidance, while exhibiting superior computational efficiency compared to its counterparts. We leverage HabiCrowd to conduct several comprehensive studies on crowd-aware visual navigation tasks and human-robot interactions. The source code and data can be found at https://habicrowd.github.io/.
A bi-level encoding scheme for the clustered shortest-path tree problem in multifactorial optimization
Feb 12, 2021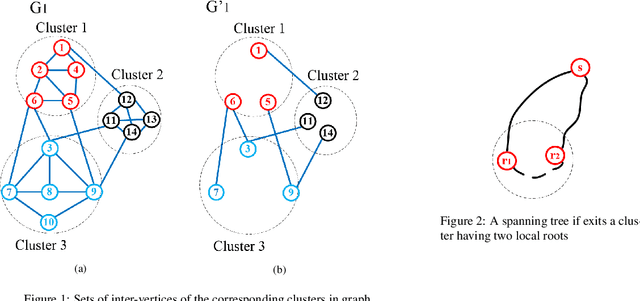

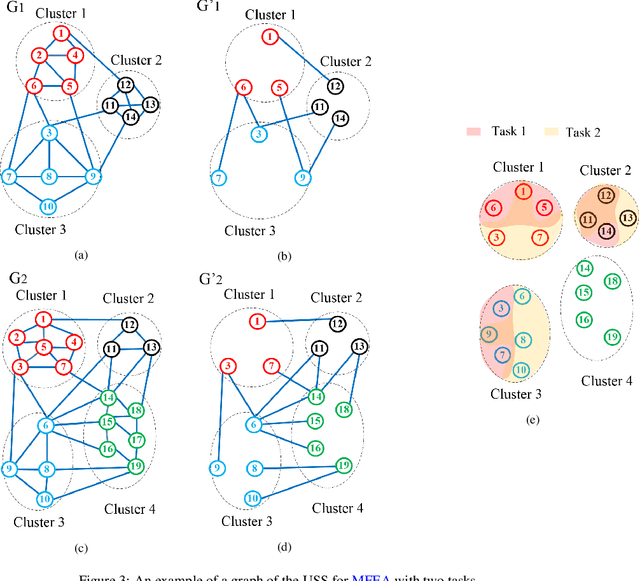
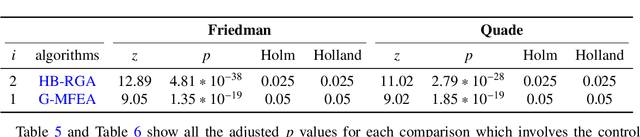
The Clustered Shortest-Path Tree Problem (CluSPT) plays an important role in various types of optimization problems in real-life. Recently, some Multifactorial Evolutionary Algorithm (MFEA) have been introduced to deal with the CluSPT, however these researches still have some shortcomings such as evolution operators only perform on complete graphs, huge resource consumption for finding the solution on large search spaces. To overcome these limitations, this paper describes a MFEA-based approach to solve the CluSPT. The proposed algorithm utilizes Dijkstra's algorithm to construct the spanning trees in clusters while using evolutionary operators for building the spanning tree connecting clusters. This approach takes advantage of both exact and approximate algorithms so it enables the algorithm to function efficiently on complete and sparse graphs alike. Furthermore, evolutionary operators such as individual encoding and decoding methods are also designed with great consideration regarding performance and memory usage. We have included a proof on the repairing method's efficacy in ensuring all solutions are valid. We have conducted tests on various types of Euclidean instances to assess the effectiveness of the proposed algorithm and methods. Experiment results point out the effectiveness of the proposed algorithm existing heuristic algorithms in most of the test cases. The impact of the proposed MFEA was analyzed and a possible influential factor that may be useful for further study was also pointed out.