 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARCADE: Adaptive Robot Control with Online Changepoint-Aware Bayesian Dynamics Learning
Dec 16, 2025



Real-world robots must operate under evolving dynamics caused by changing operating conditions, external disturbances, and unmodeled effects. These may appear as gradual drifts, transient fluctuations, or abrupt shifts, demanding real-time adaptation that is robust to short-term variation yet responsive to lasting change. We propose a framework for modeling the nonlinear dynamics of robotic systems that can be updated in real time from streaming data. The method decouples representation learning from online adaptation, using latent representations learned offline to support online closed-form Bayesian updates. To handle evolving conditions, we introduce a changepoint-aware mechanism with a latent variable inferred from data likelihoods that indicates continuity or shift. When continuity is likely, evidence accumulates to refine predictions; when a shift is detected, past information is tempered to enable rapid re-learning. This maintains calibrated uncertainty and supports probabilistic reasoning about transient, gradual, or structural change. We prove that the adaptive regret of the framework grows only logarithmically in time and linearly with the number of shifts, competitive with an oracle that knows timings of shift. We validate on cartpole simulations and real quadrotor flights with swinging payloads and mid-flight drops, showing improved predictive accuracy, faster recovery, and more accurate closed-loop tracking than relevant baselines.
Multi-UAV Coverage Planning with Limited Endurance in Disaster Environment
Jan 25, 2022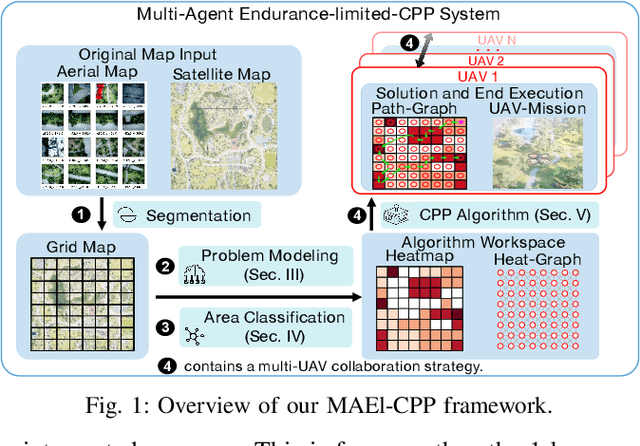
For scenes such as floods and earthquakes, the disaster area is large, and rescue time is tight. Multi-UAV exploration is more efficient than a single UAV. Existing UAV exploration work is modeled as a Coverage Path Planning (CPP) task to achieve full coverage of the area in the presence of obstacles. However, the endurance capability of UAV is limited, and the rescue time is urgent. Thus, even using multiple UAVs cannot achieve complete disaster area coverage in time. Therefore, in this paper we propose a multi-Agent Endurance-limited CPP (MAEl-CPP) problem based on a priori heatmap of the disaster area, which requires the exploration of more valuable areas under limited energy. Furthermore, we propose a path planning algorithm for the MAEl-CPP problem, by ranking the possible disaster areas according to their importance through satellite or remote aerial images and completing path planning according to the importance level. Experimental results show that our proposed algorithm is at least twice as effective as the existing method in terms of search efficiency.