 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTD-Trees: Spatio-temporal Deformable Trees for Multirotors Kinodynamic Planning
Sep 16, 2021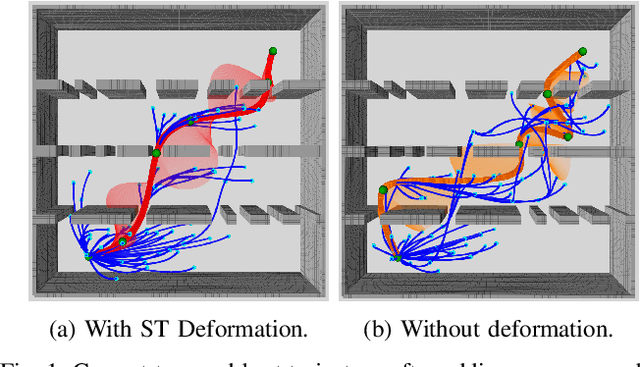
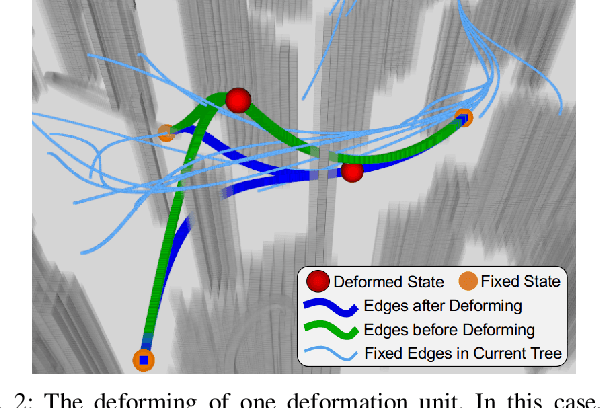
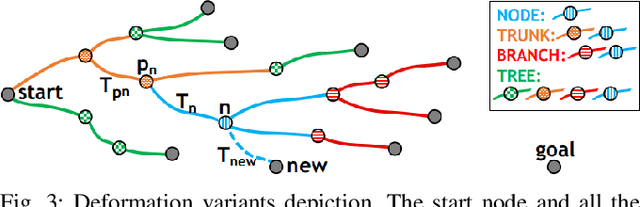
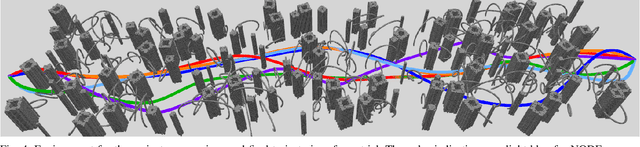
In constrained solution spaces with a huge number of homotopy classes, stand-alone sampling-based kinodynamic planners suffer low efficiency in convergence. Local optimization is integrated to alleviate this problem. In this paper, we propose to thrive the trajectory tree growing by optimizing the tree in the forms of deformation units, and each unit contains one tree node and all the edges connecting it. The deformation proceeds both spatially and temporally by optimizing the node state and edge time durations efficiently. The unit only changes the tree locally yet improves the overall quality of a corresponding sub-tree. Further, variants to deform different tree parts considering the computation burden and optimizing level are studied and compared, all showing much faster convergence. The proposed deformation is compatible with different RRT-based kinodynamic planning methods, and numerical experiments show that integrating the spatio-temporal deformation greatly accelerates the convergence and outperforms the spatial-only deformation.
Integrating Fast Regional Optimization into Sampling-based Kinodynamic Planning for Multirotor Flight
Mar 09, 2021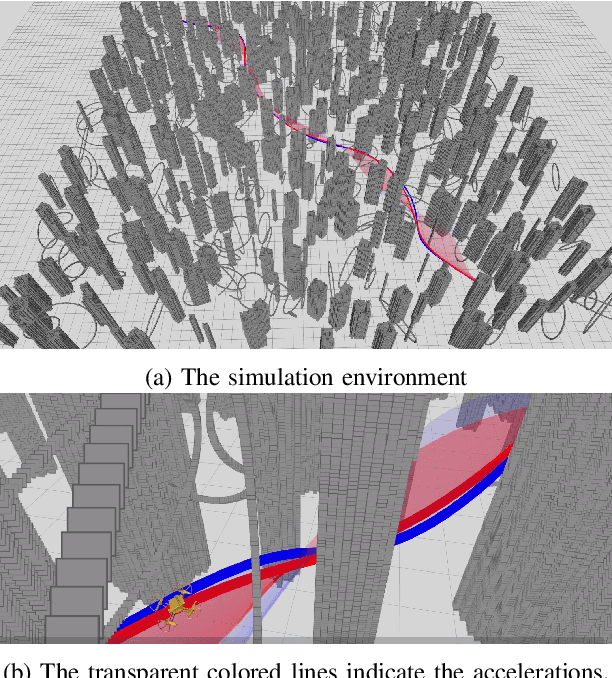
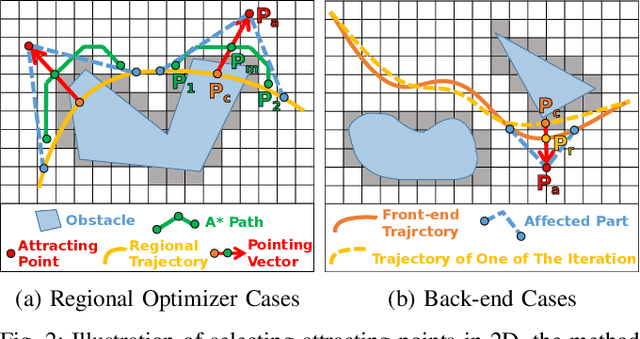
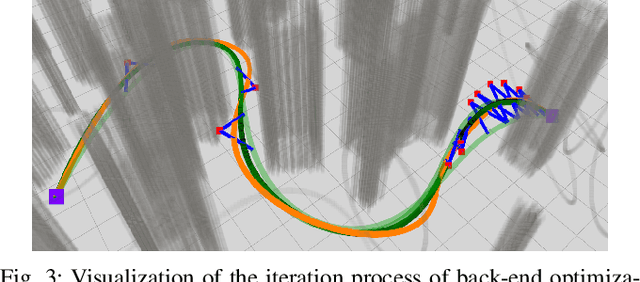
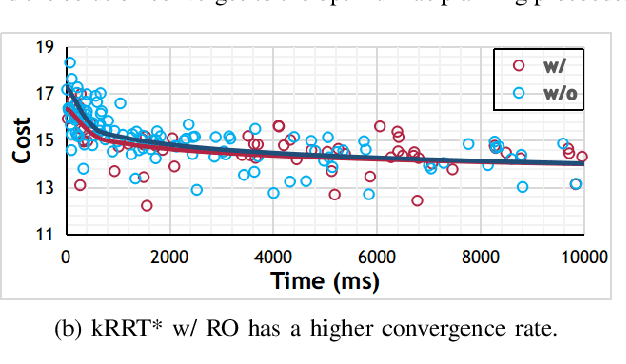
For real-time multirotor kinodynamic motion planning, the efficiency of sampling-based methods is usually hindered by difficult-to-sample homotopy classes like narrow passages. In this paper, we address this issue by a hybrid scheme. We firstly propose a fast regional optimizer exploiting the information of local environments and then integrate it into a global sampling process to ensure faster convergence. The incorporation of local optimization on different sampling-based methods shows significantly improved success rates and less planning time in various types of challenging environments. We also present a refinement module that fully investigates the resulting trajectory of the global sampling and greatly improves its smoothness with negligible computation effort. Benchmark results illustrate that compared to the state-of-the-art ones, our proposed method can better exploit a previous trajectory. The planning methods are applied to generate trajectories for a simulated quadrotor system, and its capability is validated in real-time applications.
Learning-based 3D Occupancy Prediction for Autonomous Navigation in Occluded Environments
Nov 08, 2020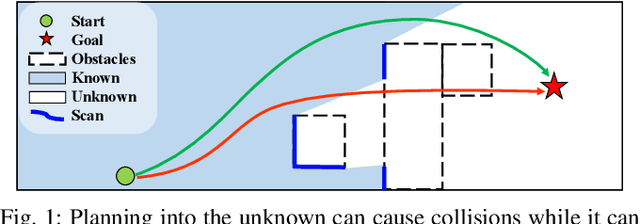
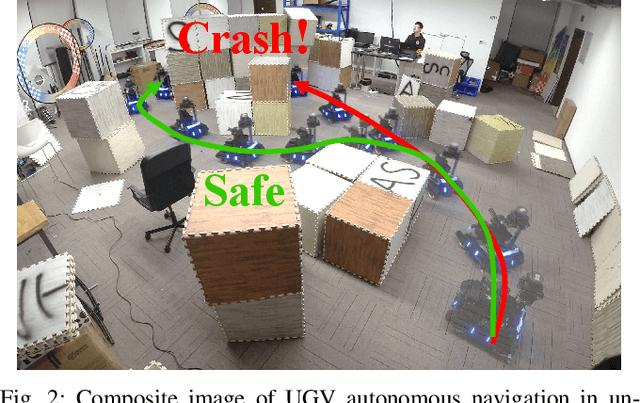

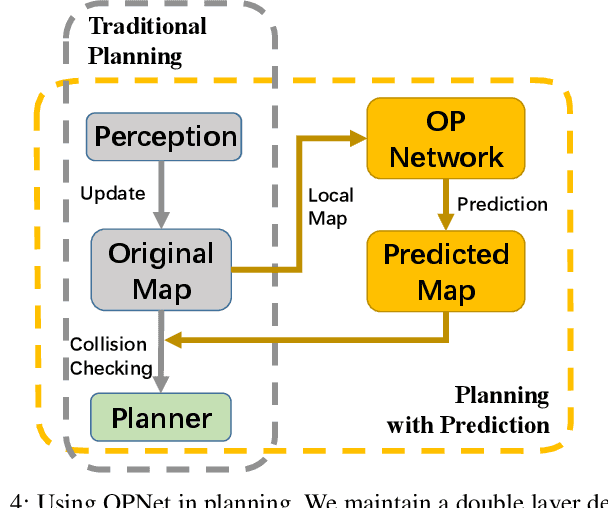
In autonomous navigation of mobile robots, sensors suffer from massive occlusion in cluttered environments, leaving significant amount of space unknown during planning. In practice, treating the unknown space in optimistic or pessimistic ways both set limitations on planning performance, thus aggressiveness and safety cannot be satisfied at the same time. However, humans can infer the exact shape of the obstacles from only partial observation and generate non-conservative trajectories that avoid possible collisions in occluded space. Mimicking human behavior, in this paper, we propose a method based on deep neural network to predict occupancy distribution of unknown space reliably. Specifically, the proposed method utilizes contextual information of environments and learns from prior knowledge to predict obstacle distributions in occluded space. We use unlabeled and no-ground-truth data to train our network and successfully apply it to real-time navigation in unseen environments without any refinement. Results show that our method leverages the performance of a kinodynamic planner by improving security with no reduction of speed in clustered environments.
Generating Large-Scale Trajectories Efficiently using Double Descriptions of Polynomials
Nov 06, 2020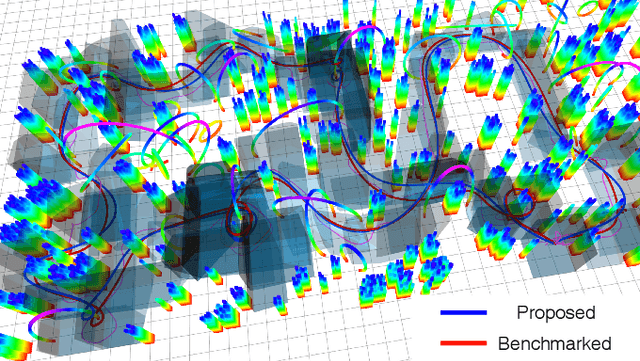
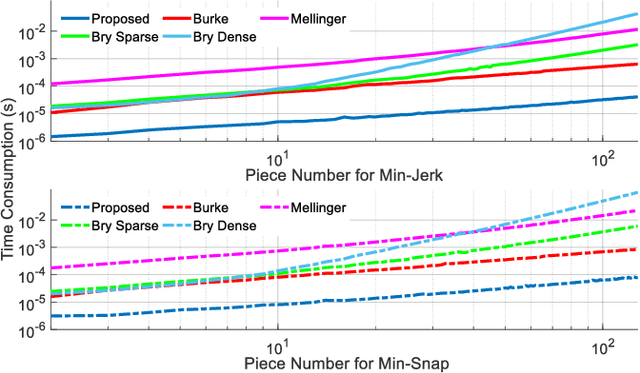
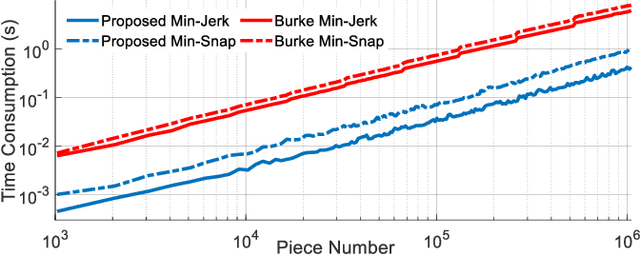
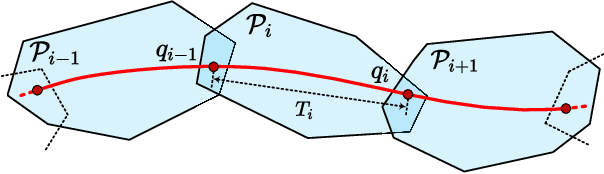
For quadrotor trajectory planning, describing a polynomial trajectory through coefficients and end-derivatives both enjoy their own convenience in energy minimization. We name them double descriptions of polynomial trajectories. The transformation between them, causing most of the inefficiency and instability, is formally analyzed in this paper. Leveraging its analytic structure, we design a linear-complexity scheme for both jerk/snap minimization and parameter gradient evaluation, which possesses efficiency, stability, flexibility, and scalability. With the help of our scheme, generating an energy optimal (minimum snap) trajectory only costs 1 $\mu s$ per piece at the scale up to 1,000,000 pieces. Moreover, generating large-scale energy-time optimal trajectories is also accelerated by an order of magnitude against conventional methods.
TGK-Planner: An Efficient Topology Guided Kinodynamic Planner for Autonomous Quadrotors
Aug 08, 2020
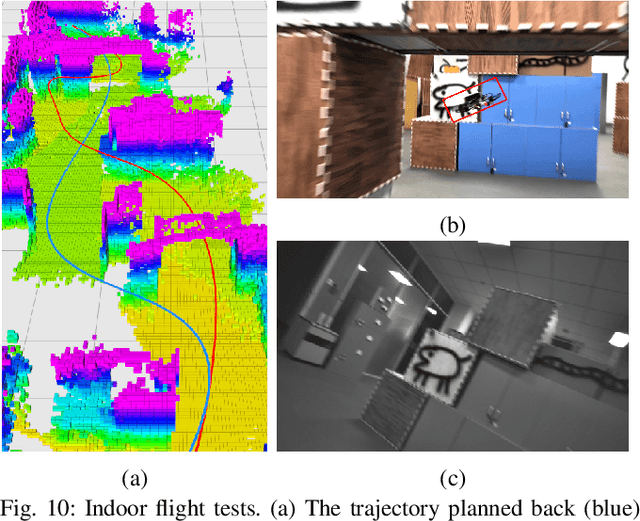
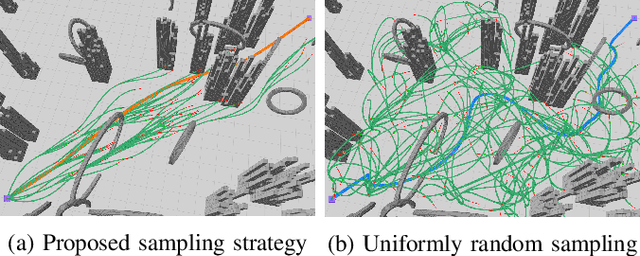
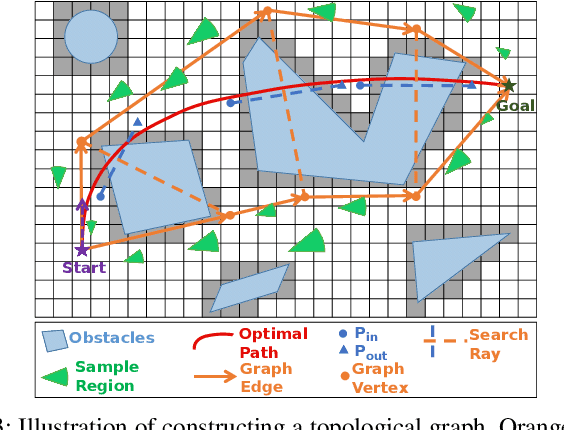
In this paper, we propose a lightweight yet effective quadrotor planning system for aggressive flights with limited onboard computing resources. The proposed system follows the traditional hierarchical planning workflow, with novel designs to improve the robustness and efficiency in both the pathfinding and trajectory optimization sub-modules. Firstly, we propose the topology guided graph, which roughly captures the topological structure of the environment and guides the state sampling of a sampling-based kinodynamic planner. In this way, we significantly improve the efficiency of finding a safe and dynamically feasible trajectory. Then, we refine the smoothness and continuity of the trajectory in an optimization framework, which incorporates the homotopy constraint to guarantee the safety of the trajectory. The optimization program is formulated as a sequence of quadratic programmings (QPs) and can be iteratively solved in a few milliseconds. Finally, the proposed system is integrated into a fully autonomous quadrotor and validated in various simulated and real-world scenarios. Benchmark comparisons show that our method outperforms state-of-the-art methods with regard to efficiency and trajectory quality. Moreover, we will release our code as an open-source package.