 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamMemBench: Streaming Evaluation of Agent Memory for Future-Oriented Assistance
Jun 12, 2026A central role of personal-agent memory is to turn stored information and prior interactions into future-oriented assistance. In daily use, useful cues come from what the agent observes and how the user interacts with the agent, and the agent must carry them forward from the current request to similar future tasks. Existing memory benchmarks usually test dialogue recall or task improvement in isolation, leaving the trajectory from streaming observations to later assistance largely untested. We introduce StreamMemBench, a streaming benchmark that constructs a two-step task sequence around each evidence anchor from EgoLife egocentric streams. The initial task tests evidence use, while the follow-up task tests whether feedback and interaction experience are reused. Four metrics diagnose evidence recall, initial evidence use, feedback incorporation, and follow-up reuse. Experiments with eight memory systems across two backbones show that current systems often fail to use observed evidence or turn feedback into reliable follow-up behavior, even when evidence is stored or feedback is incorporated locally. StreamMemBench is publicly available at https://github.com/landian60/StreamMemBench.
From Hidden Profiles to Governable Personalization: Recommender Systems in the Age of LLM Agents
Apr 22, 2026Personalization has traditionally depended on platform-specific user models that are optimized for prediction but remain largely inaccessible to the people they describe. As LLM-based assistants increasingly mediate search, shopping, travel, and content access, this arrangement may be giving way to a new personalization stack in which user representation is no longer confined to isolated platforms. In this paper, we argue that the key issue is not simply that large language models can enhance recommendation quality, but that they reconfigure where and how user representations are produced, exposed, and acted upon. We propose a shift from hidden platform profiling toward governable personalization, where user representations may become more inspectable, revisable, portable, and consequential across services. Building on this view, we identify five research fronts for recommender systems: transparent yet privacy-preserving user modeling, intent translation and alignment, cross-domain representation and memory design, trustworthy commercialization in assistant-mediated environments, and operational mechanisms for ownership, access, and accountability. We position these not as isolated technical challenges, but as interconnected design problems created by the emergence of LLM agents as intermediaries between users and digital platforms. We argue that the future of recommender systems will depend not only on better inference, but on building personalization systems that users can meaningfully understand, shape, and govern.
SoulSeek: Exploring the Use of Social Cues in LLM-based Information Seeking
Jan 03, 2026Social cues, which convey others' presence, behaviors, or identities, play a crucial role in human information seeking by helping individuals judge relevance and trustworthiness. However, existing LLM-based search systems primarily rely on semantic features, creating a misalignment with the socialized cognition underlying natural information seeking. To address this gap, we explore how the integration of social cues into LLM-based search influences users' perceptions, experiences, and behaviors. Focusing on social media platforms that are beginning to adopt LLM-based search, we integrate design workshops, the implementation of the prototype system (SoulSeek), a between-subjects study, and mixed-method analyses to examine both outcome- and process-level findings. The workshop informs the prototype's cue-integrated design. The study shows that social cues improve perceived outcomes and experiences, promote reflective information behaviors, and reveal limits of current LLM-based search. We propose design implications emphasizing better social-knowledge understanding, personalized cue settings, and controllable interactions.
Lane Departure Prediction Based on Closed-Loop Vehicle Dynamics
Jan 24, 2022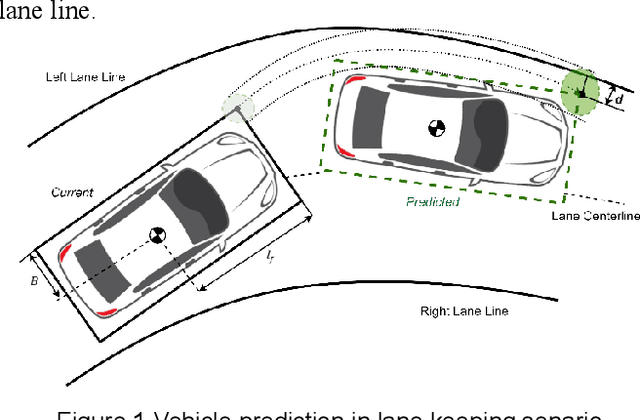
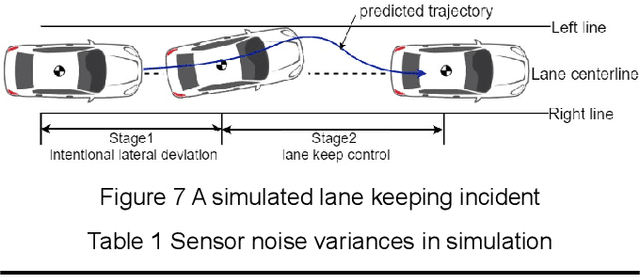
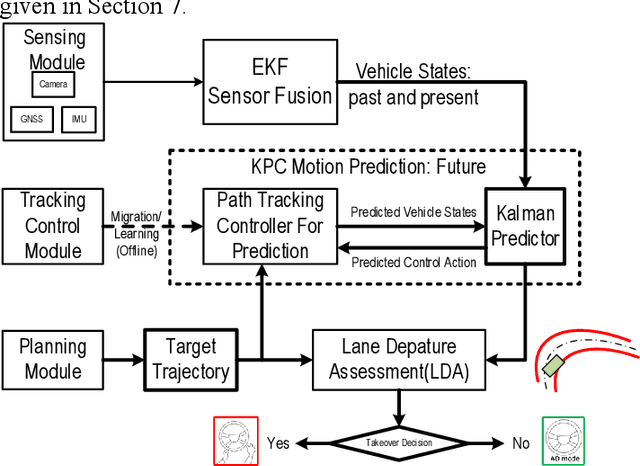
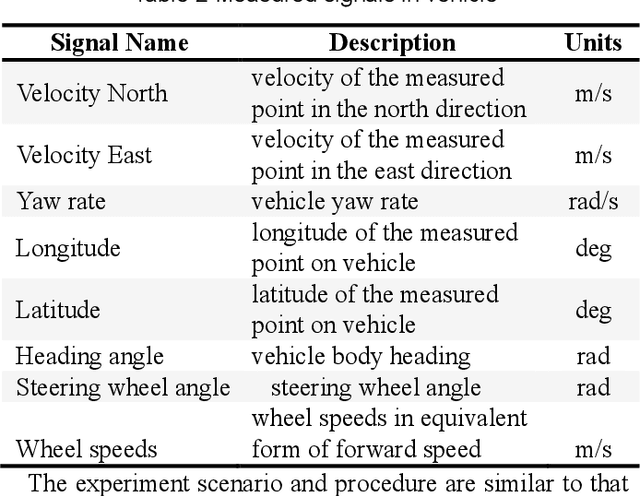
An automated driving system should have the ability to supervise its own performance and to request human driver to take over when necessary. In the lane keeping scenario, the prediction of vehicle future trajectory is the key to realize safe and trustworthy driving automation. Previous studies on vehicle trajectory prediction mainly fall into two categories, i.e. physics-based and manoeuvre-based methods. Using a physics-based methodology, this paper proposes a lane departure prediction algorithm based on closed-loop vehicle dynamics model. We use extended Kalman filter to estimate the current vehicle states based on sensing module outputs. Then a Kalman Predictor with actual lane keeping control law is used to predict steering actions and vehicle states in the future. A lane departure assessment module evaluates the probabilistic distribution of vehicle corner positions and decides whether to initiate a human takeover request. The prediction algorithm is capable to describe the stochastic characteristics of future vehicle pose, which is preliminarily proved in simulated tests. Finally, the on-road tests at speeds of 15 to 50 km/h further show that the pro-posed method can accurately predict vehicle future trajectory. It may work as a promising solution to lane departure risk assessment for automated lane keeping functions.
Human-like Driving Decision at Unsignalized Intersections Based on Game Theory
Jan 10, 2022

Unsignalized intersection driving is challenging for automated vehicles. For safe and efficient performances, the diverse and dynamic behaviors of interacting vehicles should be considered. Based on a game-theoretic framework, a human-like payoff design methodology is proposed for the automated decision at unsignalized intersections. Prospect Theory is introduced to map the objective collision risk to the subjective driver payoffs, and the driving style can be quantified as a tradeoff between safety and speed. To account for the dynamics of interaction, a probabilistic model is further introduced to describe the acceleration tendency of drivers. Simulation results show that the proposed decision algorithm can describe the dynamic process of two-vehicle interaction in limit cases. Statistics of uniformly-sampled cases simulation indicate that the success rate of safe interaction reaches 98%, while the speed efficiency can also be guaranteed. The proposed approach is further applied and validated in four-vehicle interaction scenarios at a four-arm intersection.