 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiagnosis of Human Object Interaction Detectors for Real World Educational Applications
Jun 01, 2026Human-object interaction (HOI) recognition is critical for automatically analyzing student behavior in complex educational environments. Although state-of-the-art (SOTA) HOI detectors perform well on benchmark datasets, their performance often degrades when deployed in real-world training environments due to domain-specific objects, occlusions, and complex visual conditions. In this paper, we introduce a diagnosis-driven framework that integrates a triplet-level HOI error taxonomy with error-factor attribution analysis for real-world educational video data. We study this problem in the context of Critical Care Air Transport Team (CCATT) mixed-reality medical training. Based on an analysis of HOI failure modes and their causes, we develop a diagnosis-informed refinement strategy for adapting pretrained HOI models to the target domain. Experiments on the CCATT dataset show that this approach improves the macro-F1 score of a pretrained CDN model from 48.6 to 90.2 through targeted refinement guided by diagnosed error factors. These results highlight the value of detailed diagnostic analysis for informing targeted adaptation of HOI models in real-world educational environments.
Safe Continual Reinforcement Learning in Non-stationary Environments
Apr 21, 2026Reinforcement learning (RL) offers a compelling data-driven paradigm for synthesizing controllers for complex systems when accurate physical models are unavailable; however, most existing control-oriented RL methods assume stationarity and, therefore, struggle in real-world non-stationary deployments where system dynamics and operating conditions can change unexpectedly. Moreover, RL controllers acting in physical environments must satisfy safety constraints throughout their learning and execution phases, rendering transient violations during adaptation unacceptable. Although continual RL and safe RL have each addressed non-stationarity and safety, respectively, their intersection remains comparatively unexplored, motivating the study of safe continual RL algorithms that can adapt over the system's lifetime while preserving safety. In this work, we systematically investigate safe continual reinforcement learning by introducing three benchmark environments that capture safety-critical continual adaptation and by evaluating representative approaches from safe RL, continual RL, and their combinations. Our empirical results reveal a fundamental tension between maintaining safety constraints and preventing catastrophic forgetting under non-stationary dynamics, with existing methods generally failing to achieve both objectives simultaneously. To address this shortcoming, we examine regularization-based strategies that partially mitigate this trade-off and characterize their benefits and limitations. Finally, we outline key open challenges and research directions toward developing safe, resilient learning-based controllers capable of sustained autonomous operation in changing environments.
BEAGLE: Behavior-Enforced Agent for Grounded Learner Emulation
Feb 06, 2026Simulating student learning behaviors in open-ended problem-solving environments holds potential for education research, from training adaptive tutoring systems to stress-testing pedagogical interventions. However, collecting authentic data is challenging due to privacy concerns and the high cost of longitudinal studies. While Large Language Models (LLMs) offer a promising path to student simulation, they suffer from competency bias, optimizing for efficient correctness rather than the erratic, iterative struggle characteristic of novice learners. We present BEAGLE, a neuro-symbolic framework that addresses this bias by incorporating Self-Regulated Learning (SRL) theory into a novel architecture. BEAGLE integrates three key technical innovations: (1) a semi-Markov model that governs the timing and transitions of cognitive behaviors and metacognitive behaviors; (2) Bayesian Knowledge Tracing with explicit flaw injection to enforce realistic knowledge gaps and "unknown unknowns"; and (3) a decoupled agent design that separates high-level strategy use from code generation actions to prevent the model from silently correcting its own intentional errors. In evaluations on Python programming tasks, BEAGLE significantly outperforms state-of-the-art baselines in reproducing authentic trajectories. In a human Turing test, users were unable to distinguish synthetic traces from real student data, achieving an accuracy indistinguishable from random guessing (52.8%).
Using Large Language Models to Detect Socially Shared Regulation of Collaborative Learning
Jan 08, 2026The field of learning analytics has made notable strides in automating the detection of complex learning processes in multimodal data. However, most advancements have focused on individualized problem-solving instead of collaborative, open-ended problem-solving, which may offer both affordances (richer data) and challenges (low cohesion) to behavioral prediction. Here, we extend predictive models to automatically detect socially shared regulation of learning (SSRL) behaviors in collaborative computational modeling environments using embedding-based approaches. We leverage large language models (LLMs) as summarization tools to generate task-aware representations of student dialogue aligned with system logs. These summaries, combined with text-only embeddings, context-enriched embeddings, and log-derived features, were used to train predictive models. Results show that text-only embeddings often achieve stronger performance in detecting SSRL behaviors related to enactment or group dynamics (e.g., off-task behavior or requesting assistance). In contrast, contextual and multimodal features provide complementary benefits for constructs such as planning and reflection. Overall, our findings highlight the promise of embedding-based models for extending learning analytics by enabling scalable detection of SSRL behaviors, ultimately supporting real-time feedback and adaptive scaffolding in collaborative learning environments that teachers value.
Video-Based Performance Evaluation for ECR Drills in Synthetic Training Environments
Dec 29, 2025Effective urban warfare training requires situational awareness and muscle memory, developed through repeated practice in realistic yet controlled environments. A key drill, Enter and Clear the Room (ECR), demands threat assessment, coordination, and securing confined spaces. The military uses Synthetic Training Environments that offer scalable, controlled settings for repeated exercises. However, automatic performance assessment remains challenging, particularly when aiming for objective evaluation of cognitive, psychomotor, and teamwork skills. Traditional methods often rely on costly, intrusive sensors or subjective human observation, limiting scalability and accuracy. This paper introduces a video-based assessment pipeline that derives performance analytics from training videos without requiring additional hardware. By utilizing computer vision models, the system extracts 2D skeletons, gaze vectors, and movement trajectories. From these data, we develop task-specific metrics that measure psychomotor fluency, situational awareness, and team coordination. These metrics feed into an extended Cognitive Task Analysis (CTA) hierarchy, which employs a weighted combination to generate overall performance scores for teamwork and cognition. We demonstrate the approach with a case study of real-world ECR drills, providing actionable, domain specific metrics that capture individual and team performance. We also discuss how these insights can support After Action Reviews with interactive dashboards within Gamemaster and the Generalized Intelligent Framework for Tutoring (GIFT), providing intuitive and understandable feedback. We conclude by addressing limitations, including tracking difficulties, ground-truth validation, and the broader applicability of our approach. Future work includes expanding analysis to 3D video data and leveraging video analysis to enable scalable evaluation within STEs.
Designing Gaze Analytics for ELA Instruction: A User-Centered Dashboard with Conversational AI Support
Sep 03, 2025
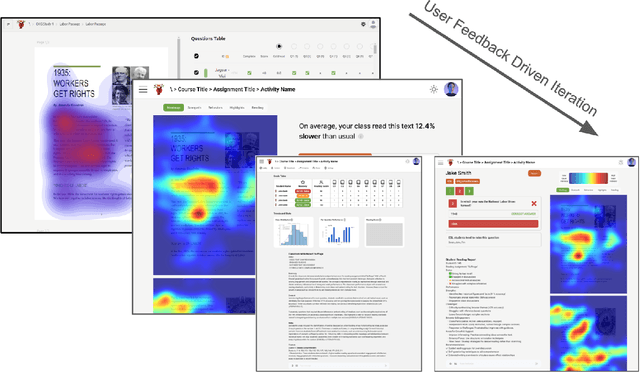
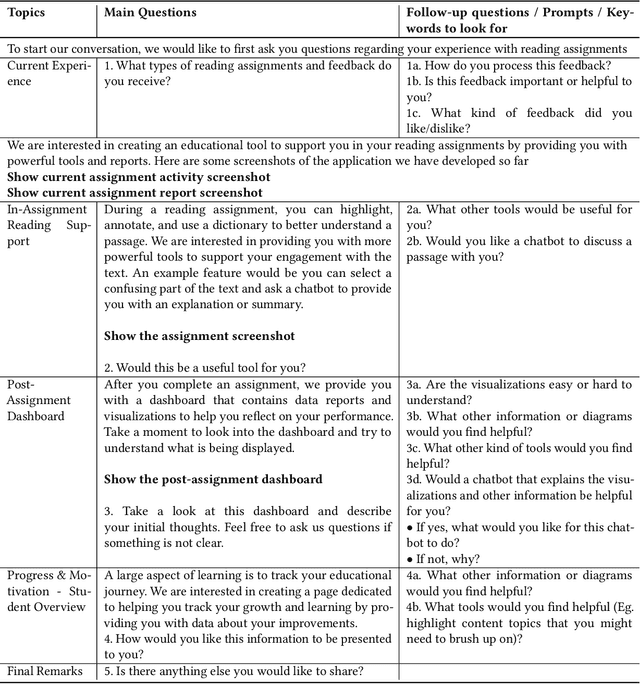
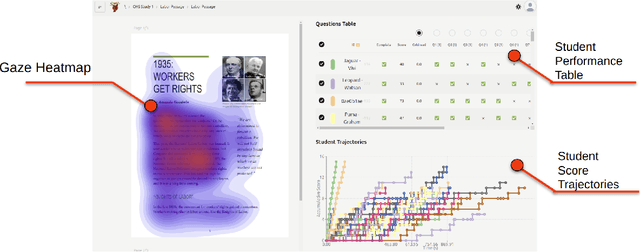
Eye-tracking offers rich insights into student cognition and engagement, but remains underutilized in classroom-facing educational technology due to challenges in data interpretation and accessibility. In this paper, we present the iterative design and evaluation of a gaze-based learning analytics dashboard for English Language Arts (ELA), developed through five studies involving teachers and students. Guided by user-centered design and data storytelling principles, we explored how gaze data can support reflection, formative assessment, and instructional decision-making. Our findings demonstrate that gaze analytics can be approachable and pedagogically valuable when supported by familiar visualizations, layered explanations, and narrative scaffolds. We further show how a conversational agent, powered by a large language model (LLM), can lower cognitive barriers to interpreting gaze data by enabling natural language interactions with multimodal learning analytics. We conclude with design implications for future EdTech systems that aim to integrate novel data modalities in classroom contexts.
WEBEYETRACK: Scalable Eye-Tracking for the Browser via On-Device Few-Shot Personalization
Aug 27, 2025With advancements in AI, new gaze estimation methods are exceeding state-of-the-art (SOTA) benchmarks, but their real-world application reveals a gap with commercial eye-tracking solutions. Factors like model size, inference time, and privacy often go unaddressed. Meanwhile, webcam-based eye-tracking methods lack sufficient accuracy, in particular due to head movement. To tackle these issues, we introduce We bEyeTrack, a framework that integrates lightweight SOTA gaze estimation models directly in the browser. It incorporates model-based head pose estimation and on-device few-shot learning with as few as nine calibration samples (k < 9). WebEyeTrack adapts to new users, achieving SOTA performance with an error margin of 2.32 cm on GazeCapture and real-time inference speeds of 2.4 milliseconds on an iPhone 14. Our open-source code is available at https://github.com/RedForestAi/WebEyeTrack.
Personalizing Student-Agent Interactions Using Log-Contextualized Retrieval Augmented Generation (RAG)
May 22, 2025Collaborative dialogue offers rich insights into students' learning and critical thinking. This is essential for adapting pedagogical agents to students' learning and problem-solving skills in STEM+C settings. While large language models (LLMs) facilitate dynamic pedagogical interactions, potential hallucinations can undermine confidence, trust, and instructional value. Retrieval-augmented generation (RAG) grounds LLM outputs in curated knowledge, but its effectiveness depends on clear semantic links between user input and a knowledge base, which are often weak in student dialogue. We propose log-contextualized RAG (LC-RAG), which enhances RAG retrieval by incorporating environment logs to contextualize collaborative discourse. Our findings show that LC-RAG improves retrieval over a discourse-only baseline and allows our collaborative peer agent, Copa, to deliver relevant, personalized guidance that supports students' critical thinking and epistemic decision-making in a collaborative computational modeling environment, XYZ.
CoTAL: Human-in-the-Loop Prompt Engineering, Chain-of-Thought Reasoning, and Active Learning for Generalizable Formative Assessment Scoring
Apr 03, 2025



Large language models (LLMs) have created new opportunities to assist teachers and support student learning. Methods such as chain-of-thought (CoT) prompting enable LLMs to grade formative assessments in science, providing scores and relevant feedback to students. However, the extent to which these methods generalize across curricula in multiple domains (such as science, computing, and engineering) remains largely untested. In this paper, we introduce Chain-of-Thought Prompting + Active Learning (CoTAL), an LLM-based approach to formative assessment scoring that (1) leverages Evidence-Centered Design (ECD) principles to develop curriculum-aligned formative assessments and rubrics, (2) applies human-in-the-loop prompt engineering to automate response scoring, and (3) incorporates teacher and student feedback to iteratively refine assessment questions, grading rubrics, and LLM prompts for automated grading. Our findings demonstrate that CoTAL improves GPT-4's scoring performance, achieving gains of up to 24.5% over a non-prompt-engineered baseline. Both teachers and students view CoTAL as effective in scoring and explaining student responses, each providing valuable refinements to enhance grading accuracy and explanation quality.
LLMs as Educational Analysts: Transforming Multimodal Data Traces into Actionable Reading Assessment Reports
Mar 03, 2025



Reading assessments are essential for enhancing students' comprehension, yet many EdTech applications focus mainly on outcome-based metrics, providing limited insights into student behavior and cognition. This study investigates the use of multimodal data sources -- including eye-tracking data, learning outcomes, assessment content, and teaching standards -- to derive meaningful reading insights. We employ unsupervised learning techniques to identify distinct reading behavior patterns, and then a large language model (LLM) synthesizes the derived information into actionable reports for educators, streamlining the interpretation process. LLM experts and human educators evaluate these reports for clarity, accuracy, relevance, and pedagogical usefulness. Our findings indicate that LLMs can effectively function as educational analysts, turning diverse data into teacher-friendly insights that are well-received by educators. While promising for automating insight generation, human oversight remains crucial to ensure reliability and fairness. This research advances human-centered AI in education, connecting data-driven analytics with practical classroom applications.