 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUrbanBIS: a Large-scale Benchmark for Fine-grained Urban Building Instance Segmentation
May 04, 2023



We present the UrbanBIS benchmark for large-scale 3D urban understanding, supporting practical urban-level semantic and building-level instance segmentation. UrbanBIS comprises six real urban scenes, with 2.5 billion points, covering a vast area of 10.78 square kilometers and 3,370 buildings, captured by 113,346 views of aerial photogrammetry. Particularly, UrbanBIS provides not only semantic-level annotations on a rich set of urban objects, including buildings, vehicles, vegetation, roads, and bridges, but also instance-level annotations on the buildings. Further, UrbanBIS is the first 3D dataset that introduces fine-grained building sub-categories, considering a wide variety of shapes for different building types. Besides, we propose B-Seg, a building instance segmentation method to establish UrbanBIS. B-Seg adopts an end-to-end framework with a simple yet effective strategy for handling large-scale point clouds. Compared with mainstream methods, B-Seg achieves better accuracy with faster inference speed on UrbanBIS. In addition to the carefully-annotated point clouds, UrbanBIS provides high-resolution aerial-acquisition photos and high-quality large-scale 3D reconstruction models, which shall facilitate a wide range of studies such as multi-view stereo, urban LOD generation, aerial path planning, autonomous navigation, road network extraction, and so on, thus serving as an important platform for many intelligent city applications.
UrbanScene3D: A Large Scale Urban Scene Dataset and Simulator
Jul 09, 2021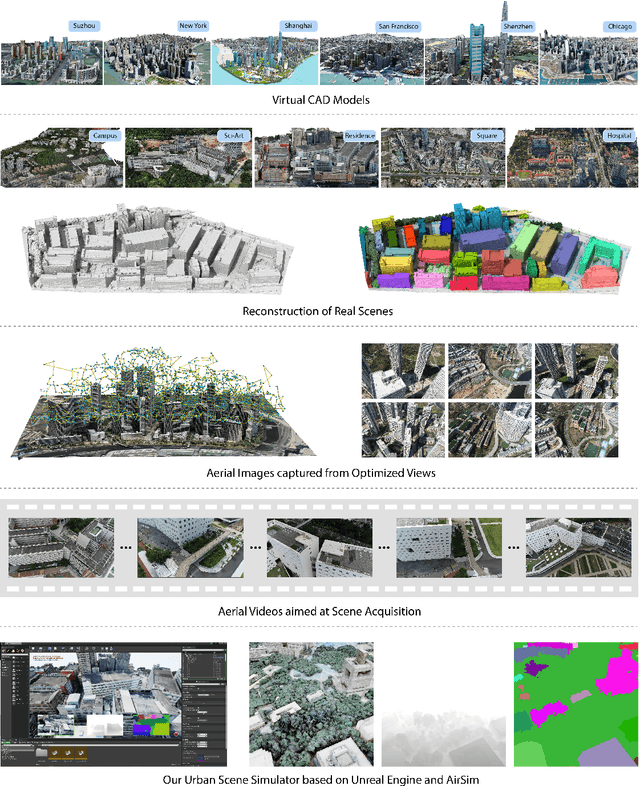
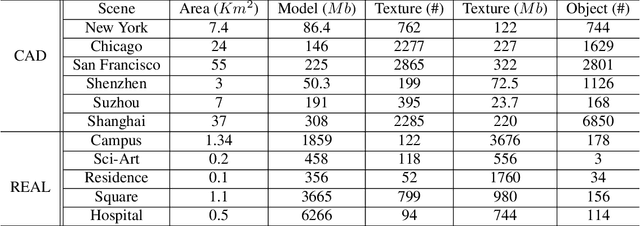
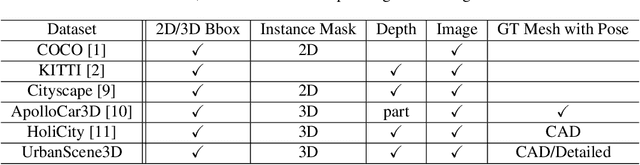
The ability to perceive the environments in different ways is essential to robotic research. This involves the analysis of both 2D and 3D data sources. We present a large scale urban scene dataset associated with a handy simulator based on Unreal Engine 4 and AirSim, which consists of both man-made and real-world reconstruction scenes in different scales, referred to as UrbanScene3D. Unlike previous works that purely based on 2D information or man-made 3D CAD models, UrbanScene3D contains both compact man-made models and detailed real-world models reconstructed by aerial images. Each building has been manually extracted from the entire scene model and then has been assigned with a unique label, forming an instance segmentation map. The provided 3D ground-truth textured models with instance segmentation labels in UrbanScene3D allow users to obtain all kinds of data they would like to have: instance segmentation map, depth map in arbitrary resolution, 3D point cloud/mesh in both visible and invisible places, etc. In addition, with the help of AirSim, users can also simulate the robots (cars/drones)to test a variety of autonomous tasks in the proposed city environment. Please refer to our paper and website(https://vcc.tech/UrbanScene3D/) for further details and applications.
Hausdorff Point Convolution with Geometric Priors
Dec 24, 2020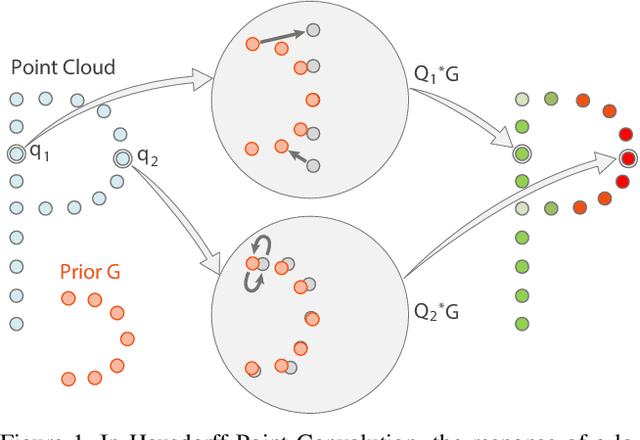
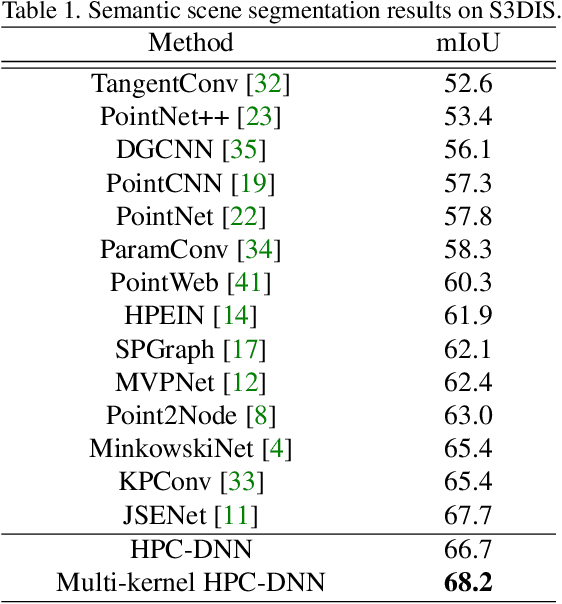
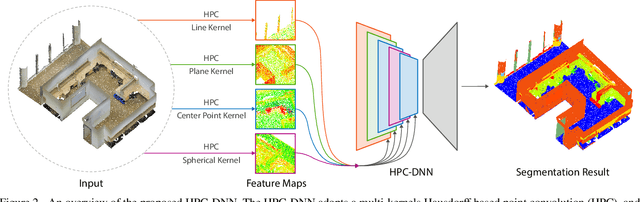
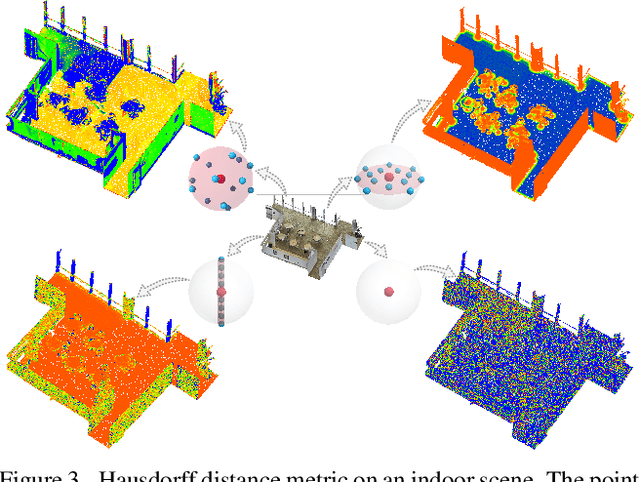
Without a shape-aware response, it is hard to characterize the 3D geometry of a point cloud efficiently with a compact set of kernels. In this paper, we advocate the use of Hausdorff distance as a shape-aware distance measure for calculating point convolutional responses. The technique we present, coined Hausdorff Point Convolution (HPC), is shape-aware. We show that HPC constitutes a powerful point feature learning with a rather compact set of only four types of geometric priors as kernels. We further develop a HPC-based deep neural network (HPC-DNN). Task-specific learning can be achieved by tuning the network weights for combining the shortest distances between input and kernel point sets. We also realize hierarchical feature learning by designing a multi-kernel HPC for multi-scale feature encoding. Extensive experiments demonstrate that HPC-DNN outperforms strong point convolution baselines (e.g., KPConv), achieving 2.8% mIoU performance boost on S3DIS and 1.5% on SemanticKITTI for semantic segmentation task.