 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCreating Impactful Autonomous Driving Datasets: A Strategic Guide from Research Gap to Benchmark
Jul 01, 2026Well-designed autonomous driving datasets have fundamentally shaped research progress, yet existing literature primarily describes what datasets contain rather than how to strategically design impactful ones. This is especially limiting for small and medium-sized labs and startups that cannot afford to misallocate scarce resources. We argue that impactful dataset creation begins with a diagnosis: whether a research question is blocked by a data problem or an evaluation problem, and proceeds by selecting the minimal data operator(s) that closes the resulting gap, recording new data only when no cheaper operator(s) suffices. We analyze the evolution of major autonomous driving (AD) datasets through this lens and distill a strategic framework spanning gap identification, operator choice, sensor suite design, and annotation strategy. We ground the framework in a running case study of our KITScenes dataset family. The datasets are available at: https://kitscenes.com/
The Road Ahead in Autonomous Driving: The KITScenes Multimodal Dataset
Jun 01, 2026Existing autonomous driving datasets have enabled major progress, but fall short in sensor fidelity, map completeness, or geographic diversity. We present KITScenes Multimodal, a European dataset built around high-fidelity sensors and maps. Our fully synchronized sensor suite combines high-resolution global-shutter cameras, long-range lidar beyond 400m, 4D imaging radar, and redundant GNSS/INS localization. Our HD maps are, to our knowledge, the most complete of any sensor dataset, validated through autonomous driving trials on open-source software. For the first time in a public dataset, all driving-relevant traffic elements, such as traffic lights, are mapped in 3D to a reprojection-accurate level with full topological connectivity. Recorded in cities with irregular street layouts and mixed traffic modes, our dataset complements existing datasets by broadening the available geographic diversity. We also introduce four benchmarks, each advancing spatial learning for embodied AI: online HD map construction, long-range depth estimation, novel view synthesis, and end-to-end driving. Project page: https://kitscenes.com/
LongTail Driving Scenarios with Reasoning Traces: The KITScenes LongTail Dataset
Mar 24, 2026In real-world domains such as self-driving, generalization to rare scenarios remains a fundamental challenge. To address this, we introduce a new dataset designed for end-to-end driving that focuses on long-tail driving events. We provide multi-view video data, trajectories, high-level instructions, and detailed reasoning traces, facilitating in-context learning and few-shot generalization. The resulting benchmark for multimodal models, such as VLMs and VLAs, goes beyond safety and comfort metrics by evaluating instruction following and semantic coherence between model outputs. The multilingual reasoning traces in English, Spanish, and Chinese are from domain experts with diverse cultural backgrounds. Thus, our dataset is a unique resource for studying how different forms of reasoning affect driving competence. Our dataset is available at: https://hf.co/datasets/kit-mrt/kitscenes-longtail
RetroMotion: Retrocausal Motion Forecasting Models are Instructable
May 26, 2025Motion forecasts of road users (i.e., agents) vary in complexity as a function of scene constraints and interactive behavior. We address this with a multi-task learning method for motion forecasting that includes a retrocausal flow of information. The corresponding tasks are to forecast (1) marginal trajectory distributions for all modeled agents and (2) joint trajectory distributions for interacting agents. Using a transformer model, we generate the joint distributions by re-encoding marginal distributions followed by pairwise modeling. This incorporates a retrocausal flow of information from later points in marginal trajectories to earlier points in joint trajectories. Per trajectory point, we model positional uncertainty using compressed exponential power distributions. Notably, our method achieves state-of-the-art results in the Waymo Interaction Prediction dataset and generalizes well to the Argoverse 2 dataset. Additionally, our method provides an interface for issuing instructions through trajectory modifications. Our experiments show that regular training of motion forecasting leads to the ability to follow goal-based instructions and to adapt basic directional instructions to the scene context. Code: https://github.com/kit-mrt/future-motion
Efficient Sampling in POMDPs with Lipschitz Bandits for Motion Planning in Continuous Spaces
Jun 08, 2021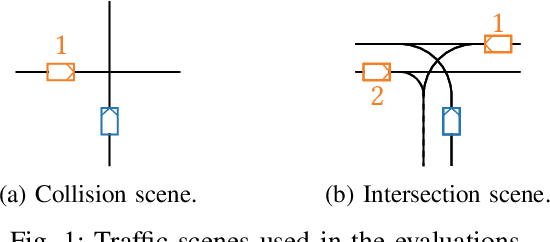
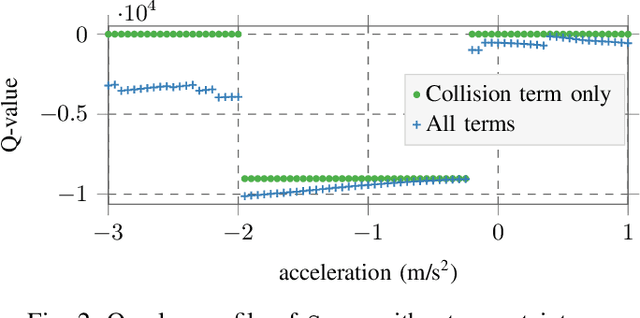
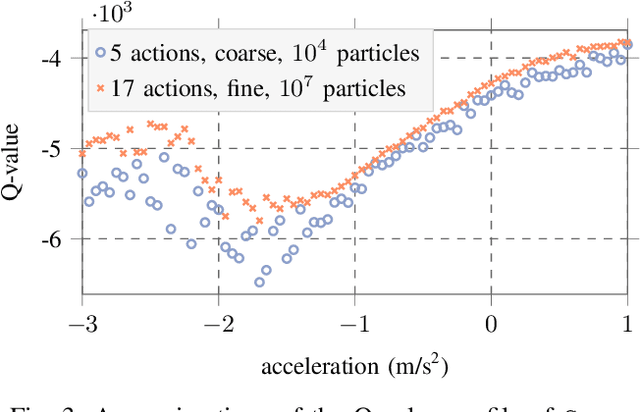
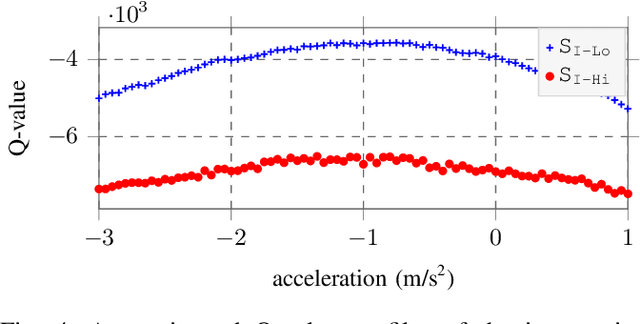
Decision making under uncertainty can be framed as a partially observable Markov decision process (POMDP). Finding exact solutions of POMDPs is generally computationally intractable, but the solution can be approximated by sampling-based approaches. These sampling-based POMDP solvers rely on multi-armed bandit (MAB) heuristics, which assume the outcomes of different actions to be uncorrelated. In some applications, like motion planning in continuous spaces, similar actions yield similar outcomes. In this paper, we utilize variants of MAB heuristics that make Lipschitz continuity assumptions on the outcomes of actions to improve the efficiency of sampling-based planning approaches. We demonstrate the effectiveness of this approach in the context of motion planning for automated driving.
Inspect, Understand, Overcome: A Survey of Practical Methods for AI Safety
Apr 29, 2021The use of deep neural networks (DNNs) in safety-critical applications like mobile health and autonomous driving is challenging due to numerous model-inherent shortcomings. These shortcomings are diverse and range from a lack of generalization over insufficient interpretability to problems with malicious inputs. Cyber-physical systems employing DNNs are therefore likely to suffer from safety concerns. In recent years, a zoo of state-of-the-art techniques aiming to address these safety concerns has emerged. This work provides a structured and broad overview of them. We first identify categories of insufficiencies to then describe research activities aiming at their detection, quantification, or mitigation. Our paper addresses both machine learning experts and safety engineers: The former ones might profit from the broad range of machine learning topics covered and discussions on limitations of recent methods. The latter ones might gain insights into the specifics of modern ML methods. We moreover hope that our contribution fuels discussions on desiderata for ML systems and strategies on how to propel existing approaches accordingly.
Decision-Time Postponing Motion Planning for Combinatorial Uncertain Maneuvering
Dec 13, 2020
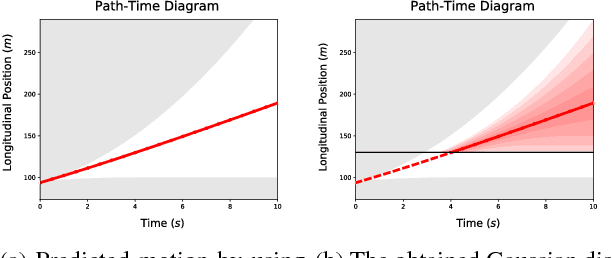
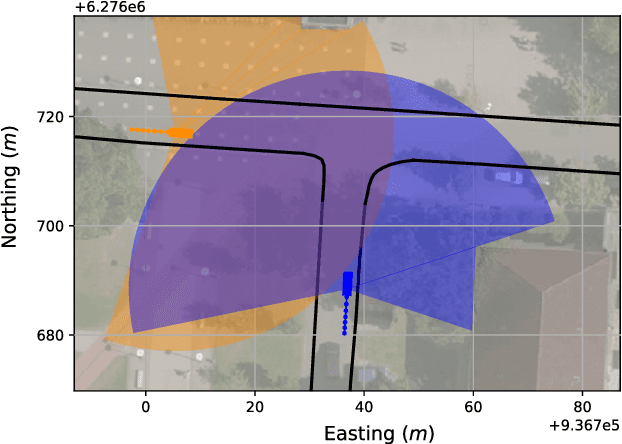
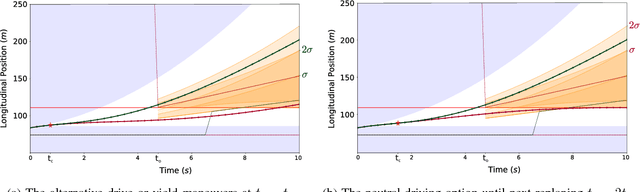
Motion planning involves decision making among combinatorial maneuver variants in urban driving. A planner must consider uncertainties and associated risks of the maneuver variants, and subsequently select a maneuver alternative. In this paper we present a planning approach that considers the uncertainties in the prediction and, in case of high uncertainty, postpones the combinatorial decision making to a later time within the planning horizon. With our proposed approach, safe but at the same time not overconservative motion is planned.
* 7 pages, 5 figures