 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagentic-UI: Towards Human-in-the-loop Agentic Systems
Jul 30, 2025AI agents powered by large language models are increasingly capable of autonomously completing complex, multi-step tasks using external tools. Yet, they still fall short of human-level performance in most domains including computer use, software development, and research. Their growing autonomy and ability to interact with the outside world, also introduces safety and security risks including potentially misaligned actions and adversarial manipulation. We argue that human-in-the-loop agentic systems offer a promising path forward, combining human oversight and control with AI efficiency to unlock productivity from imperfect systems. We introduce Magentic-UI, an open-source web interface for developing and studying human-agent interaction. Built on a flexible multi-agent architecture, Magentic-UI supports web browsing, code execution, and file manipulation, and can be extended with diverse tools via Model Context Protocol (MCP). Moreover, Magentic-UI presents six interaction mechanisms for enabling effective, low-cost human involvement: co-planning, co-tasking, multi-tasking, action guards, and long-term memory. We evaluate Magentic-UI across four dimensions: autonomous task completion on agentic benchmarks, simulated user testing of its interaction capabilities, qualitative studies with real users, and targeted safety assessments. Our findings highlight Magentic-UI's potential to advance safe and efficient human-agent collaboration.
NeRF-Aug: Data Augmentation for Robotics with Neural Radiance Fields
Nov 04, 2024



Training a policy that can generalize to unknown objects is a long standing challenge within the field of robotics. The performance of a policy often drops significantly in situations where an object in the scene was not seen during training. To solve this problem, we present NeRF-Aug, a novel method that is capable of teaching a policy to interact with objects that are not present in the dataset. This approach differs from existing approaches by leveraging the speed and photorealism of a neural radiance field for augmentation. NeRF- Aug both creates more photorealistic data and runs 3.83 times faster than existing methods. We demonstrate the effectiveness of our method on 4 tasks with 11 novel objects that have no expert demonstration data. We achieve an average 69.1% success rate increase over existing methods. See video results at https://nerf-aug.github.io.
DAMP: Doubly Aligned Multilingual Parser for Task-Oriented Dialogue
Dec 15, 2022Modern virtual assistants use internal semantic parsing engines to convert user utterances to actionable commands. However, prior work has demonstrated that semantic parsing is a difficult multilingual transfer task with low transfer efficiency compared to other tasks. In global markets such as India and Latin America, this is a critical issue as switching between languages is prevalent for bilingual users. In this work we dramatically improve the zero-shot performance of a multilingual and codeswitched semantic parsing system using two stages of multilingual alignment. First, we show that constrastive alignment pretraining improves both English performance and transfer efficiency. We then introduce a constrained optimization approach for hyperparameter-free adversarial alignment during finetuning. Our Doubly Aligned Multilingual Parser (DAMP) improves mBERT transfer performance by 3x, 6x, and 81x on the Spanglish, Hinglish and Multilingual Task Oriented Parsing benchmarks respectively and outperforms XLM-R and mT5-Large using 3.2x fewer parameters.
Learning for Microrobot Exploration: Model-based Locomotion, Sparse-robust Navigation, and Low-power Deep Classification
Apr 27, 2020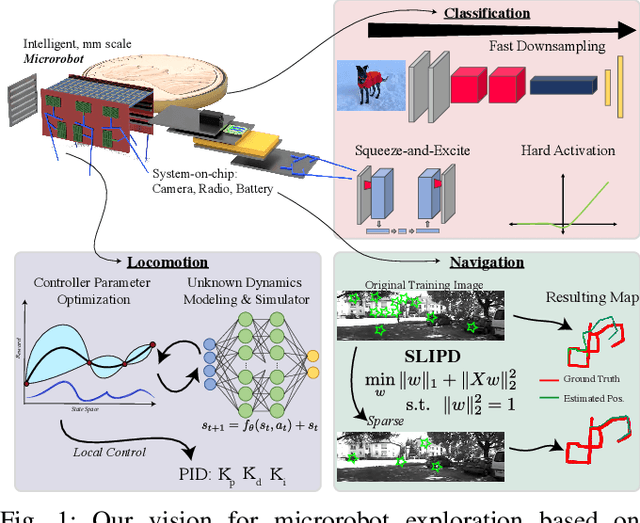
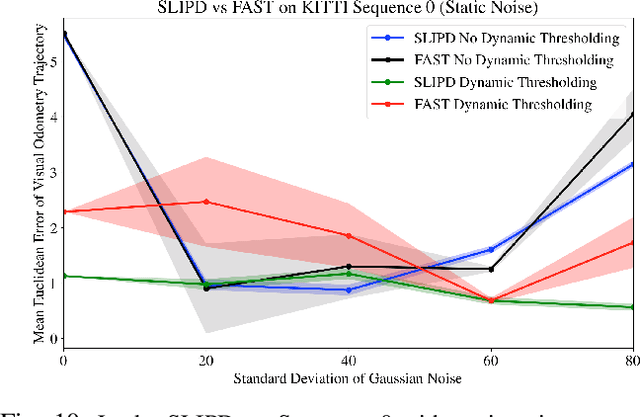
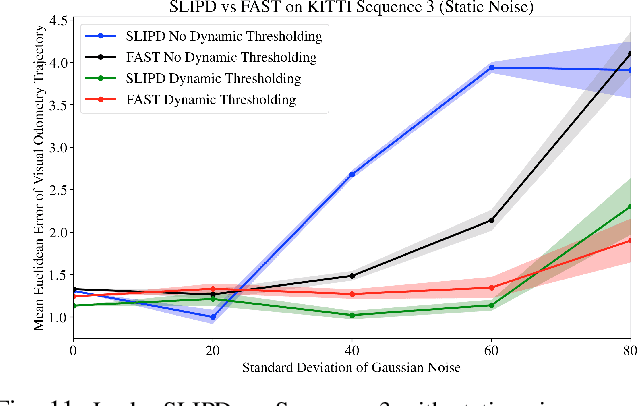
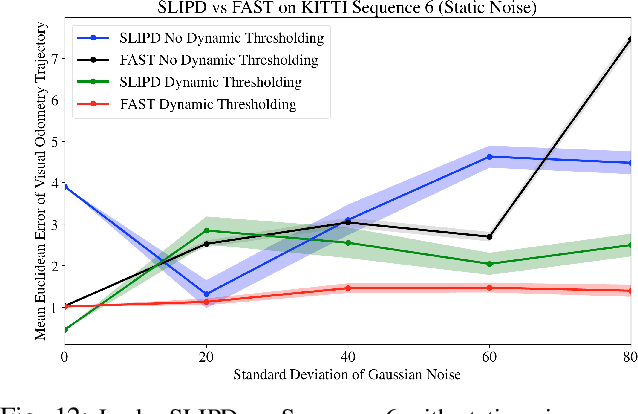
Building intelligent autonomous systems at any scale is challenging. The sensing and computation constraints of a microrobot platform make the problems harder. We present improvements to learning-based methods for on-board learning of locomotion, classification, and navigation of microrobots. We show how simulated locomotion can be achieved with model-based reinforcement learning via on-board sensor data distilled into control. Next, we introduce a sparse, linear detector and a Dynamic Thresholding method to FAST Visual Odometry for improved navigation in the noisy regime of mm scale imagery. We end with a new image classifier capable of classification with fewer than one million multiply-and-accumulate (MAC) operations by combining fast downsampling, efficient layer structures and hard activation functions. These are promising steps toward using state-of-the-art algorithms in the power-limited world of edge-intelligence and microrobots.