 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolutionary Approach to Security Games with Signaling
Apr 29, 2022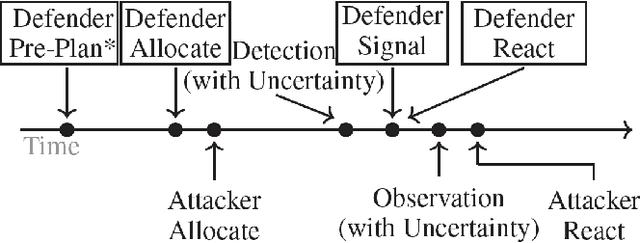
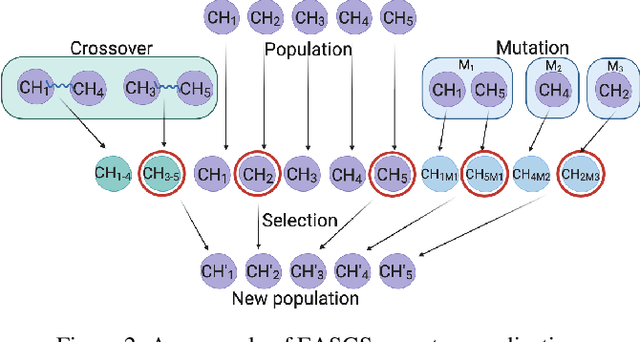
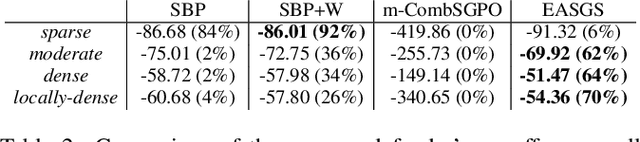
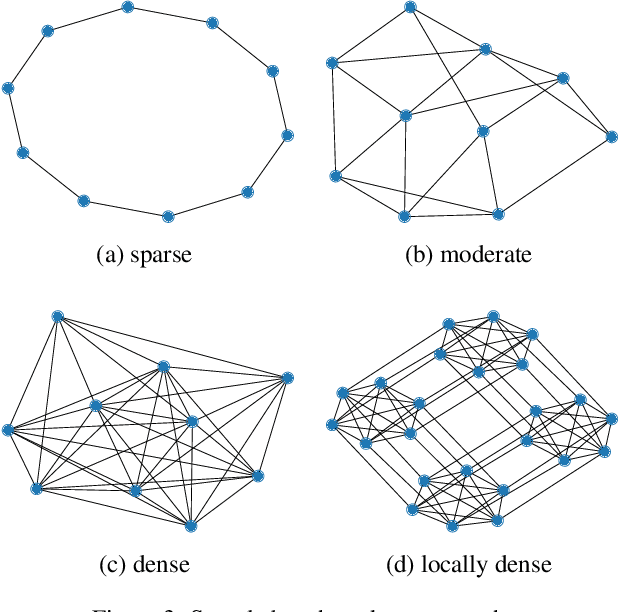
Green Security Games have become a popular way to model scenarios involving the protection of natural resources, such as wildlife. Sensors (e.g. drones equipped with cameras) have also begun to play a role in these scenarios by providing real-time information. Incorporating both human and sensor defender resources strategically is the subject of recent work on Security Games with Signaling (SGS). However, current methods to solve SGS do not scale well in terms of time or memory. We therefore propose a novel approach to SGS, which, for the first time in this domain, employs an Evolutionary Computation paradigm: EASGS. EASGS effectively searches the huge SGS solution space via suitable solution encoding in a chromosome and a specially-designed set of operators. The operators include three types of mutations, each focusing on a particular aspect of the SGS solution, optimized crossover and a local coverage improvement scheme (a memetic aspect of EASGS). We also introduce a new set of benchmark games, based on dense or locally-dense graphs that reflect real-world SGS settings. In the majority of 342 test game instances, EASGS outperforms state-of-the-art methods, including a reinforcement learning method, in terms of time scalability, nearly constant memory utilization, and quality of the returned defender's strategies (expected payoffs).
Role of Human-AI Interaction in Selective Prediction
Dec 13, 2021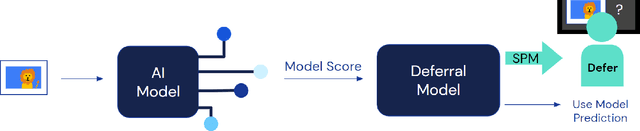
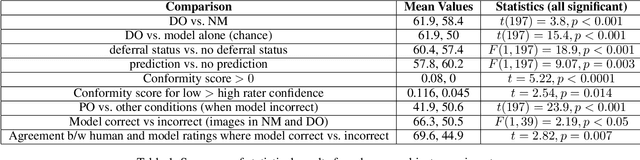

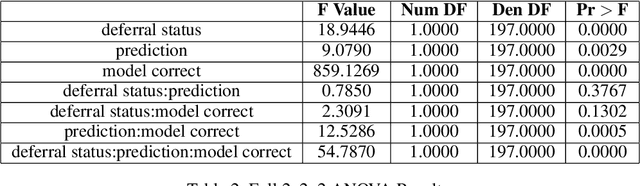
Recent work has shown the potential benefit of selective prediction systems that can learn to defer to a human when the predictions of the AI are unreliable, particularly to improve the reliability of AI systems in high-stakes applications like healthcare or conservation. However, most prior work assumes that human behavior remains unchanged when they solve a prediction task as part of a human-AI team as opposed to by themselves. We show that this is not the case by performing experiments to quantify human-AI interaction in the context of selective prediction. In particular, we study the impact of communicating different types of information to humans about the AI system's decision to defer. Using real-world conservation data and a selective prediction system that improves expected accuracy over that of the human or AI system working individually, we show that this messaging has a significant impact on the accuracy of human judgements. Our results study two components of the messaging strategy: 1) Whether humans are informed about the prediction of the AI system and 2) Whether they are informed about the decision of the selective prediction system to defer. By manipulating these messaging components, we show that it is possible to significantly boost human performance by informing the human of the decision to defer, but not revealing the prediction of the AI. We therefore show that it is vital to consider how the decision to defer is communicated to a human when designing selective prediction systems, and that the composite accuracy of a human-AI team must be carefully evaluated using a human-in-the-loop framework.
Proceedings of KDD 2021 Workshop on Data-driven Humanitarian Mapping: Harnessing Human-Machine Intelligence for High-Stake Public Policy and Resilience Planning
Sep 07, 2021Humanitarian challenges, including natural disasters, food insecurity, climate change, racial and gender violence, environmental crises, the COVID-19 coronavirus pandemic, human rights violations, and forced displacements, disproportionately impact vulnerable communities worldwide. According to UN OCHA, 235 million people will require humanitarian assistance in 2021. Despite these growing perils, there remains a notable paucity of data science research to scientifically inform equitable public policy decisions for improving the livelihood of at-risk populations. Scattered data science efforts exist to address these challenges, but they remain isolated from practice and prone to algorithmic harms concerning lack of privacy, fairness, interpretability, accountability, transparency, and ethics. Biases in data-driven methods carry the risk of amplifying inequalities in high-stakes policy decisions that impact the livelihood of millions of people. Consequently, proclaimed benefits of data-driven innovations remain inaccessible to policymakers, practitioners, and marginalized communities at the core of humanitarian actions and global development. To help fill this gap, we propose the Data-driven Humanitarian Mapping Research Program, which focuses on developing novel data science methodologies that harness human-machine intelligence for high-stakes public policy and resilience planning. The proceedings of the 2nd Data-driven Humanitarian Mapping workshop at the 27th ACM SIGKDD Conference on Knowledge Discovery & Data Mining. August 15th, 2021
Can poachers find animals from public camera trap images?
Jun 21, 2021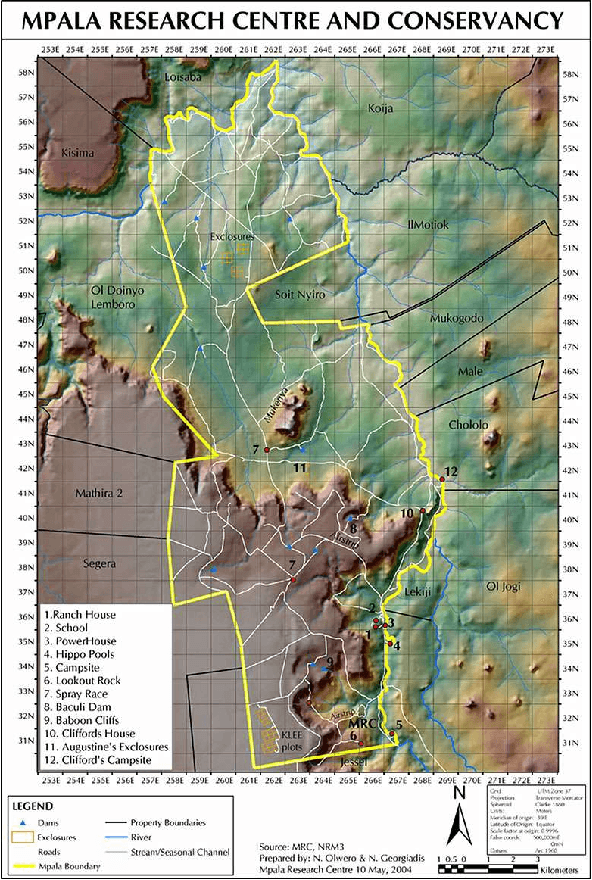
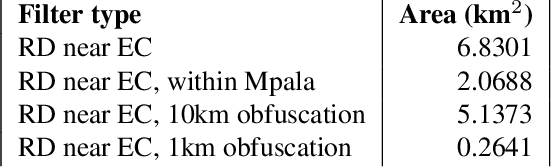
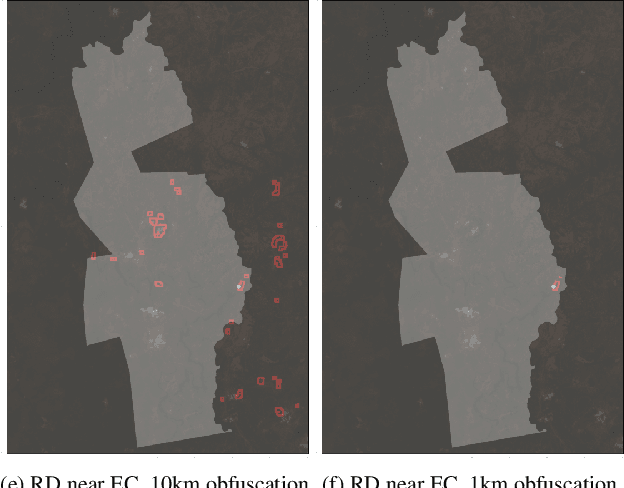
To protect the location of camera trap data containing sensitive, high-target species, many ecologists randomly obfuscate the latitude and longitude of the camera when publishing their data. For example, they may publish a random location within a 1km radius of the true camera location for each camera in their network. In this paper, we investigate the robustness of geo-obfuscation for maintaining camera trap location privacy, and show via a case study that a few simple, intuitive heuristics and publicly available satellite rasters can be used to reduce the area likely to contain the camera by 87% (assuming random obfuscation within 1km), demonstrating that geo-obfuscation may be less effective than previously believed.
Envisioning Communities: A Participatory Approach Towards AI for Social Good
May 04, 2021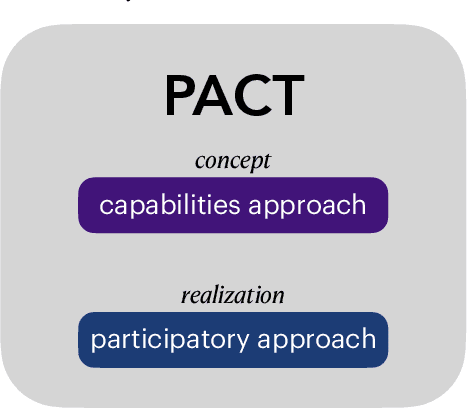
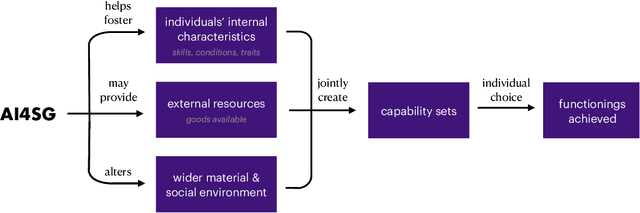
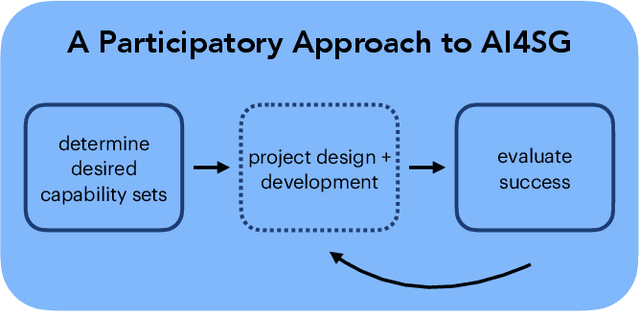
Research in artificial intelligence (AI) for social good presupposes some definition of social good, but potential definitions have been seldom suggested and never agreed upon. The normative question of what AI for social good research should be "for" is not thoughtfully elaborated, or is frequently addressed with a utilitarian outlook that prioritizes the needs of the majority over those who have been historically marginalized, brushing aside realities of injustice and inequity. We argue that AI for social good ought to be assessed by the communities that the AI system will impact, using as a guide the capabilities approach, a framework to measure the ability of different policies to improve human welfare equity. Furthermore, we lay out how AI research has the potential to catalyze social progress by expanding and equalizing capabilities. We show how the capabilities approach aligns with a participatory approach for the design and implementation of AI for social good research in a framework we introduce called PACT, in which community members affected should be brought in as partners and their input prioritized throughout the project. We conclude by providing an incomplete set of guiding questions for carrying out such participatory AI research in a way that elicits and respects a community's own definition of social good.
Dual-Mandate Patrols: Multi-Armed Bandits for Green Security
Sep 14, 2020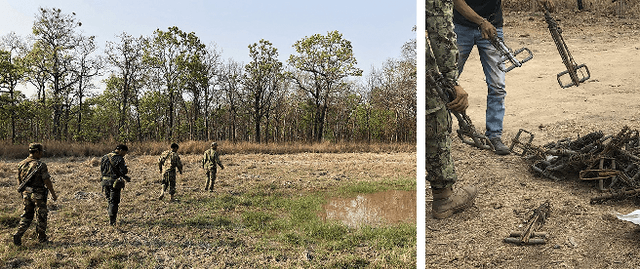

Conservation efforts in green security domains to protect wildlife and forests are constrained by the limited availability of defenders (i.e., patrollers), who must patrol vast areas to protect from attackers (e.g., poachers or illegal loggers). Defenders must choose how much time to spend in each region of the protected area, balancing exploration of infrequently visited regions and exploitation of known hotspots. We formulate the problem as a stochastic multi-armed bandit, where each action represents a patrol strategy, enabling us to guarantee the rate of convergence of the patrolling policy. However, a naive bandit approach would compromise short-term performance for long-term optimality, resulting in animals poached and forests destroyed. To speed up performance, we leverage smoothness in the reward function and decomposability of actions. We show a synergy between Lipschitz-continuity and decomposition as each aids the convergence of the other. In doing so, we bridge the gap between combinatorial and Lipschitz bandits, presenting a no-regret approach that tightens existing guarantees while optimizing for short-term performance. We demonstrate that our algorithm, LIZARD, improves performance on real-world poaching data from Cambodia.