 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferable Delay-Aware Reinforcement Learning via Implicit Causal Graph Modeling
May 12, 2026Random delays weaken the temporal correspondence between actions and subsequent state feedback, making it difficult for agents to identify the true propagation process of action effects. In cross-task scenarios, changes in task objectives and reward formulations further reduce the reusability of previously acquired task knowledge. To address this problem, this paper proposes a transferable delay-aware reinforcement learning method based on implicit causal graph modeling. The proposed method uses a field-node encoder to represent high-dimensional observations as latent states with node-level semantics, and employs a message-passing mechanism to characterize dynamic causal dependencies among nodes, thereby learning transferable structured representations and environment dynamics knowledge. On this basis, imagination-driven behavior learning and planning are incorporated to optimize policies in the latent space, enabling cross-task knowledge transfer and rapid adaptation. Experimental results show that the proposed method outperforms baseline methods on DMC continuous control tasks with random delays. Cross-task transfer experiments further demonstrate that the learned structured representations and dynamics knowledge can be effectively transferred to new tasks and significantly accelerate policy adaptation.
Delay-Empowered Causal Hierarchical Reinforcement Learning
May 12, 2026Many real-world tasks involve delayed effects, where the outcomes of actions emerge after varying time lags. Existing delay-aware reinforcement learning methods often rely on state augmentation, prior knowledge of delay distributions, or access to non-delayed data, limiting their generalization. Hierarchical reinforcement learning, by contrast, inherently offers advantages in handling delays due to its hierarchical structure, yet existing methods are restricted to fixed delays. To address these limitations, we propose Delay-Empowered Causal Hierarchical Reinforcement Learning (DECHRL). DECHRL explicitly models both the causal structure of state transitions and their associated stochastic delay distributions. These are then incorporated into a delay-aware empowerment objective that drives proactive exploration toward highly controllable states, thereby improving performance under temporal uncertainty. We evaluate DECHRL in modified 2D-Minecraft and MiniGrid environments featuring stochastic delays. Experimental results show that DECHRL effectively models temporal delays and significantly outperforms baselines in decision-making under temporal uncertainty.
Multivariate Diffusion Transformer with Decoupled Attention for High-Fidelity Mask-Text Collaborative Facial Generation
Nov 16, 2025While significant progress has been achieved in multimodal facial generation using semantic masks and textual descriptions, conventional feature fusion approaches often fail to enable effective cross-modal interactions, thereby leading to suboptimal generation outcomes. To address this challenge, we introduce MDiTFace--a customized diffusion transformer framework that employs a unified tokenization strategy to process semantic mask and text inputs, eliminating discrepancies between heterogeneous modality representations. The framework facilitates comprehensive multimodal feature interaction through stacked, newly designed multivariate transformer blocks that process all conditions synchronously. Additionally, we design a novel decoupled attention mechanism by dissociating implicit dependencies between mask tokens and temporal embeddings. This mechanism segregates internal computations into dynamic and static pathways, enabling caching and reuse of features computed in static pathways after initial calculation, thereby reducing additional computational overhead introduced by mask condition by over 94% while maintaining performance. Extensive experiments demonstrate that MDiTFace significantly outperforms other competing methods in terms of both facial fidelity and conditional consistency.
Retrieval Feedback Memory Enhancement Large Model Retrieval Generation Method
Aug 25, 2025Large Language Models (LLMs) have shown remarkable capabilities across diverse tasks, yet they face inherent limitations such as constrained parametric knowledge and high retraining costs. Retrieval-Augmented Generation (RAG) augments the generation process by retrieving externally stored knowledge absent from the models internal parameters. However, RAG methods face challenges such as information loss and redundant retrievals during multi-round queries, accompanying the difficulties in precisely characterizing knowledge gaps for complex tasks. To address these problems, we propose Retrieval Feedback and Memory Retrieval Augmented Generation(RFM-RAG), which transforms the stateless retrieval of previous methods into stateful continuous knowledge management by constructing a dynamic evidence pool. Specifically, our method generates refined queries describing the models knowledge gaps using relational triples from questions and evidence from the dynamic evidence pool; Retrieves critical external knowledge to iteratively update this evidence pool; Employs a R-Feedback Model to evaluate evidence completeness until convergence. Compared to traditional RAG methods, our approach enables persistent storage of retrieved passages and effectively distills key information from passages to construct clearly new queries. Experiments on three public QA benchmarks demonstrate that RFM-RAG outperforms previous methods and improves overall system accuracy.
CEIDM: A Controlled Entity and Interaction Diffusion Model for Enhanced Text-to-Image Generation
Aug 25, 2025In Text-to-Image (T2I) generation, the complexity of entities and their intricate interactions pose a significant challenge for T2I method based on diffusion model: how to effectively control entity and their interactions to produce high-quality images. To address this, we propose CEIDM, a image generation method based on diffusion model with dual controls for entity and interaction. First, we propose an entity interactive relationships mining approach based on Large Language Models (LLMs), extracting reasonable and rich implicit interactive relationships through chain of thought to guide diffusion models to generate high-quality images that are closer to realistic logic and have more reasonable interactive relationships. Furthermore, We propose an interactive action clustering and offset method to cluster and offset the interactive action features contained in each text prompts. By constructing global and local bidirectional offsets, we enhance semantic understanding and detail supplementation of original actions, making the model's understanding of the concept of interactive "actions" more accurate and generating images with more accurate interactive actions. Finally, we design an entity control network which generates masks with entity semantic guidance, then leveraging multi-scale convolutional network to enhance entity feature and dynamic network to fuse feature. It effectively controls entities and significantly improves image quality. Experiments show that the proposed CEIDM method is better than the most representative existing methods in both entity control and their interaction control.
Separation and Collaboration: Two-Level Routing Grouped Mixture-of-Experts for Multi-Domain Continual Learning
Aug 11, 2025Multi-Domain Continual Learning (MDCL) acquires knowledge from sequential tasks with shifting class sets and distribution. Despite the Parameter-Efficient Fine-Tuning (PEFT) methods can adapt for this dual heterogeneity, they still suffer from catastrophic forgetting and forward forgetting. To address these challenges, we propose a Two-Level Routing Grouped Mixture-of-Experts (TRGE) method. Firstly, TRGE dynamically expands the pre-trained CLIP model, assigning specific expert group for each task to mitigate catastrophic forgetting. With the number of experts continually grows in this process, TRGE maintains the static experts count within the group and introduces the intra-group router to alleviate routing overfitting caused by the increasing routing complexity. Meanwhile, we design an inter-group routing policy based on task identifiers and task prototype distance, which dynamically selects relevant expert groups and combines their outputs to enhance inter-task collaboration. Secondly, to get the correct task identifiers, we leverage Multimodal Large Language Models (MLLMs) which own powerful multimodal comprehension capabilities to generate semantic task descriptions and recognize the correct task identifier. Finally, to mitigate forward forgetting, we dynamically fuse outputs for unseen samples from the frozen CLIP model and TRGE adapter based on training progress, leveraging both pre-trained and learned knowledge. Through extensive experiments across various settings, our method outperforms other advanced methods with fewer trainable parameters.
MapAgent: Trajectory-Constructed Memory-Augmented Planning for Mobile Task Automation
Jul 29, 2025



The recent advancement of autonomous agents powered by Large Language Models (LLMs) has demonstrated significant potential for automating tasks on mobile devices through graphical user interfaces (GUIs). Despite initial progress, these agents still face challenges when handling complex real-world tasks. These challenges arise from a lack of knowledge about real-life mobile applications in LLM-based agents, which may lead to ineffective task planning and even cause hallucinations. To address these challenges, we propose a novel LLM-based agent framework called MapAgent that leverages memory constructed from historical trajectories to augment current task planning. Specifically, we first propose a trajectory-based memory mechanism that transforms task execution trajectories into a reusable and structured page-memory database. Each page within a trajectory is extracted as a compact yet comprehensive snapshot, capturing both its UI layout and functional context. Secondly, we introduce a coarse-to-fine task planning approach that retrieves relevant pages from the memory database based on similarity and injects them into the LLM planner to compensate for potential deficiencies in understanding real-world app scenarios, thereby achieving more informed and context-aware task planning. Finally, planned tasks are transformed into executable actions through a task executor supported by a dual-LLM architecture, ensuring effective tracking of task progress. Experimental results in real-world scenarios demonstrate that MapAgent achieves superior performance to existing methods. The code will be open-sourced to support further research.
D3HRL: A Distributed Hierarchical Reinforcement Learning Approach Based on Causal Discovery and Spurious Correlation Detection
May 04, 2025



Current Hierarchical Reinforcement Learning (HRL) algorithms excel in long-horizon sequential decision-making tasks but still face two challenges: delay effects and spurious correlations. To address them, we propose a causal HRL approach called D3HRL. First, D3HRL models delayed effects as causal relationships across different time spans and employs distributed causal discovery to learn these relationships. Second, it employs conditional independence testing to eliminate spurious correlations. Finally, D3HRL constructs and trains hierarchical policies based on the identified true causal relationships. These three steps are iteratively executed, gradually exploring the complete causal chain of the task. Experiments conducted in 2D-MineCraft and MiniGrid show that D3HRL demonstrates superior sensitivity to delay effects and accurately identifies causal relationships, leading to reliable decision-making in complex environments.
Pairwise Similarity Regularization for Semi-supervised Graph Medical Image Segmentation
Mar 17, 2025



With fully leveraging the value of unlabeled data, semi-supervised medical image segmentation algorithms significantly reduces the limitation of limited labeled data, achieving a significant improvement in accuracy. However, the distributional shift between labeled and unlabeled data weakens the utilization of information from the labeled data. To alleviate the problem, we propose a graph network feature alignment method based on pairwise similarity regularization (PaSR) for semi-supervised medical image segmentation. PaSR aligns the graph structure of images in different domains by maintaining consistency in the pairwise structural similarity of feature graphs between the target domain and the source domain, reducing distribution shift issues in medical images. Meanwhile, further improving the accuracy of pseudo-labels in the teacher network by aligning graph clustering information to enhance the semi-supervised efficiency of the model. The experimental part was verified on three medical image segmentation benchmark datasets, with results showing improvements over advanced methods in various metrics. On the ACDC dataset, it achieved an average improvement of more than 10.66%.
FA-Harris: A Fast and Asynchronous Corner Detector for Event Cameras
Aug 16, 2019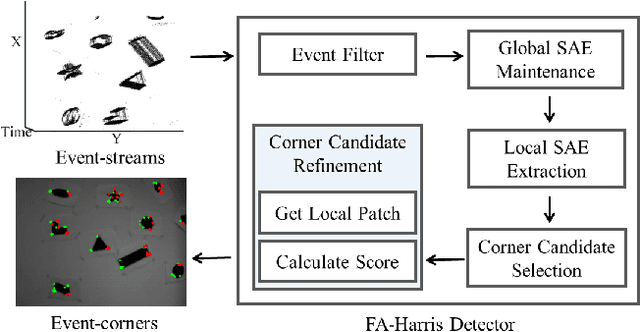
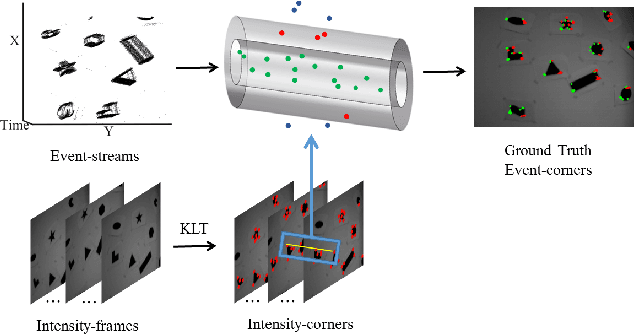
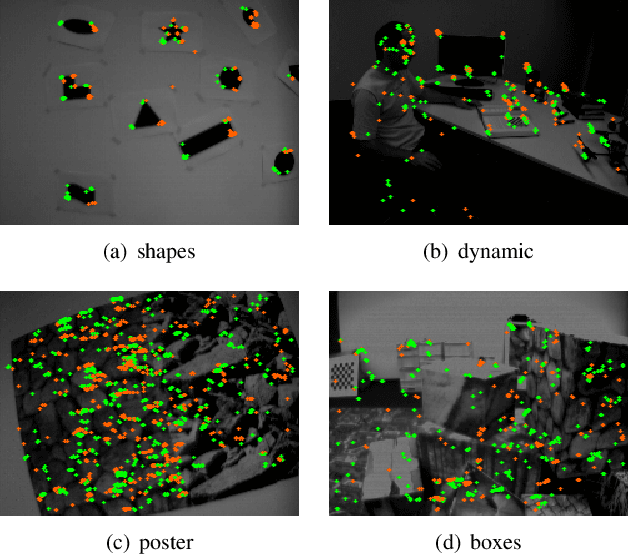
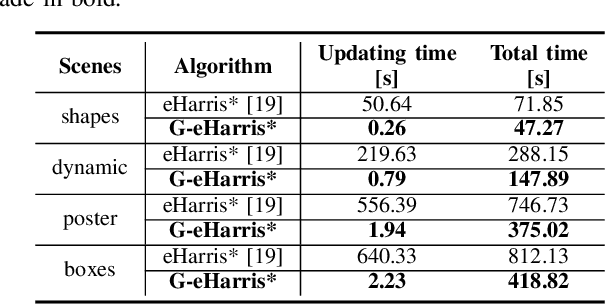
Recently, the emerging bio-inspired event cameras have demonstrated potentials for a wide range of robotic applications in dynamic environments. In this paper, we propose a novel fast and asynchronous event-based corner detection method which is called FA-Harris. FA-Harris consists of several components, including an event filter, a Global Surface of Active Events (G-SAE) maintaining unit, a corner candidate selecting unit, and a corner candidate refining unit. The proposed G-SAE maintenance algorithm and corner candidate selection algorithm greatly enhance the real-time performance for corner detection, while the corner candidate refinement algorithm maintains the accuracy of performance by using an improved event-based Harris detector. Additionally, FA-Harris does not require artificially synthesized event-frames and can operate on asynchronous events directly. We implement the proposed method in C++ and evaluate it on public Event Camera Datasets. The results show that our method achieves approximately 8x speed-up when compared with previously reported event-based Harris detector, and with no compromise on the accuracy of performance.