 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRASPrune: Global Gating for Budgeted Structured Pruning of Large Language Models
Apr 21, 2026Large language models (LLMs) are expensive to serve because model parameters, attention computation, and KV caches impose substantial memory and latency costs. We present GRASPrune, a structured pruning framework applied after pretraining that jointly prunes FFN channels and KV head groups under a single global budget. Instead of learning importance scores without constraints and applying the budget only after training, GRASPrune learns lightweight gate scores with a projected straight-through estimator that enforces a hard mask satisfying the budget at every step while keeping the backbone weights frozen. After the mask is fixed, we calibrate scaling factors on the retained units to mitigate scale mismatch caused by pruning, and fold these factors into the pruned weights to obtain a smaller dense checkpoint with no extra parameters at inference. On LLaMA-2-7B, GRASPrune removes 50% of parameters and achieves 12.18 perplexity on WikiText-2 while maintaining competitive average zero-shot accuracy on five benchmarks, using four epochs on 512 unlabeled calibration sequences on a single NVIDIA A100 80GB GPU without any full model fine-tuning.
FA-Harris: A Fast and Asynchronous Corner Detector for Event Cameras
Aug 16, 2019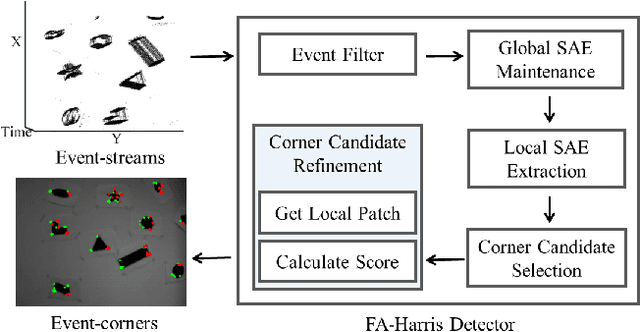
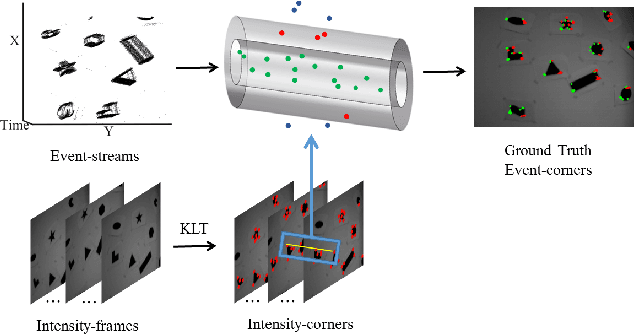
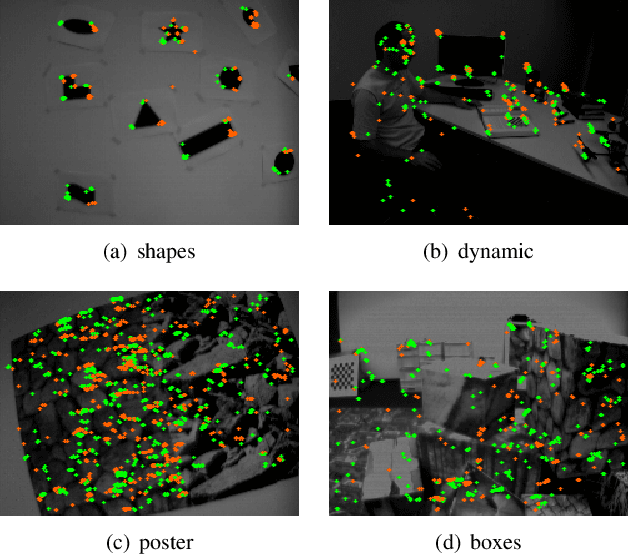
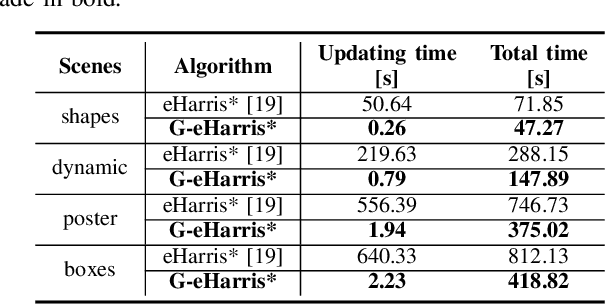
Recently, the emerging bio-inspired event cameras have demonstrated potentials for a wide range of robotic applications in dynamic environments. In this paper, we propose a novel fast and asynchronous event-based corner detection method which is called FA-Harris. FA-Harris consists of several components, including an event filter, a Global Surface of Active Events (G-SAE) maintaining unit, a corner candidate selecting unit, and a corner candidate refining unit. The proposed G-SAE maintenance algorithm and corner candidate selection algorithm greatly enhance the real-time performance for corner detection, while the corner candidate refinement algorithm maintains the accuracy of performance by using an improved event-based Harris detector. Additionally, FA-Harris does not require artificially synthesized event-frames and can operate on asynchronous events directly. We implement the proposed method in C++ and evaluate it on public Event Camera Datasets. The results show that our method achieves approximately 8x speed-up when compared with previously reported event-based Harris detector, and with no compromise on the accuracy of performance.