 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMobileLLM-Flash: Latency-Guided On-Device LLM Design for Industry Scale
Mar 16, 2026Real-time AI experiences call for on-device large language models (OD-LLMs) optimized for efficient deployment on resource-constrained hardware. The most useful OD-LLMs produce near-real-time responses and exhibit broad hardware compatibility, maximizing user reach. We present a methodology for designing such models using hardware-in-the-loop architecture search under mobile latency constraints. This system is amenable to industry-scale deployment: it generates models deployable without custom kernels and compatible with standard mobile runtimes like Executorch. Our methodology avoids specialized attention mechanisms and instead uses attention skipping for long-context acceleration. Our approach jointly optimizes model architecture (layers, dimensions) and attention pattern. To efficiently evaluate candidates, we treat each as a pruned version of a pretrained backbone with inherited weights, thereby achieving high accuracy with minimal continued pretraining. We leverage the low cost of latency evaluation in a staged process: learning an accurate latency model first, then searching for the Pareto-frontier across latency and quality. This yields MobileLLM-Flash, a family of foundation models (350M, 650M, 1.4B) for efficient on-device use with strong capabilities, supporting up to 8k context length. MobileLLM-Flash delivers up to 1.8x and 1.6x faster prefill and decode on mobile CPUs with comparable or superior quality. Our analysis of Pareto-frontier design choices offers actionable principles for OD-LLM design.
Empirical Gaussian Processes
Feb 12, 2026Gaussian processes (GPs) are powerful and widely used probabilistic regression models, but their effectiveness in practice is often limited by the choice of kernel function. This kernel function is typically handcrafted from a small set of standard functions, a process that requires expert knowledge, results in limited adaptivity to data, and imposes strong assumptions on the hypothesis space. We study Empirical GPs, a principled framework for constructing flexible, data-driven GP priors that overcome these limitations. Rather than relying on standard parametric kernels, we estimate the mean and covariance functions empirically from a corpus of historical observations, enabling the prior to reflect rich, non-trivial covariance structures present in the data. Theoretically, we show that the resulting model converges to the GP that is closest (in KL-divergence sense) to the real data generating process. Practically, we formulate the problem of learning the GP prior from independent datasets as likelihood estimation and derive an Expectation-Maximization algorithm with closed-form updates, allowing the model handle heterogeneous observation locations across datasets. We demonstrate that Empirical GPs achieve competitive performance on learning curve extrapolation and time series forecasting benchmarks.
BONSAI: Bayesian Optimization with Natural Simplicity and Interpretability
Feb 06, 2026Bayesian optimization (BO) is a popular technique for sample-efficient optimization of black-box functions. In many applications, the parameters being tuned come with a carefully engineered default configuration, and practitioners only want to deviate from this default when necessary. Standard BO, however, does not aim to minimize deviation from the default and, in practice, often pushes weakly relevant parameters to the boundary of the search space. This makes it difficult to distinguish between important and spurious changes and increases the burden of vetting recommendations when the optimization objective omits relevant operational considerations. We introduce BONSAI, a default-aware BO policy that prunes low-impact deviations from a default configuration while explicitly controlling the loss in acquisition value. BONSAI is compatible with a variety of acquisition functions, including expected improvement and upper confidence bound (GP-UCB). We theoretically bound the regret incurred by BONSAI, showing that, under certain conditions, it enjoys the same no-regret property as vanilla GP-UCB. Across many real-world applications, we empirically find that BONSAI substantially reduces the number of non-default parameters in recommended configurations while maintaining competitive optimization performance, with little effect on wall time.
Scalable Gaussian Processes with Latent Kronecker Structure
Jun 07, 2025



Applying Gaussian processes (GPs) to very large datasets remains a challenge due to limited computational scalability. Matrix structures, such as the Kronecker product, can accelerate operations significantly, but their application commonly entails approximations or unrealistic assumptions. In particular, the most common path to creating a Kronecker-structured kernel matrix is by evaluating a product kernel on gridded inputs that can be expressed as a Cartesian product. However, this structure is lost if any observation is missing, breaking the Cartesian product structure, which frequently occurs in real-world data such as time series. To address this limitation, we propose leveraging latent Kronecker structure, by expressing the kernel matrix of observed values as the projection of a latent Kronecker product. In combination with iterative linear system solvers and pathwise conditioning, our method facilitates inference of exact GPs while requiring substantially fewer computational resources than standard iterative methods. We demonstrate that our method outperforms state-of-the-art sparse and variational GPs on real-world datasets with up to five million examples, including robotics, automated machine learning, and climate applications.
Robust Gaussian Processes via Relevance Pursuit
Oct 31, 2024



Gaussian processes (GPs) are non-parametric probabilistic regression models that are popular due to their flexibility, data efficiency, and well-calibrated uncertainty estimates. However, standard GP models assume homoskedastic Gaussian noise, while many real-world applications are subject to non-Gaussian corruptions. Variants of GPs that are more robust to alternative noise models have been proposed, and entail significant trade-offs between accuracy and robustness, and between computational requirements and theoretical guarantees. In this work, we propose and study a GP model that achieves robustness against sparse outliers by inferring data-point-specific noise levels with a sequential selection procedure maximizing the log marginal likelihood that we refer to as relevance pursuit. We show, surprisingly, that the model can be parameterized such that the associated log marginal likelihood is strongly concave in the data-point-specific noise variances, a property rarely found in either robust regression objectives or GP marginal likelihoods. This in turn implies the weak submodularity of the corresponding subset selection problem, and thereby proves approximation guarantees for the proposed algorithm. We compare the model's performance relative to other approaches on diverse regression and Bayesian optimization tasks, including the challenging but common setting of sparse corruptions of the labels within or close to the function range.
Sample-Efficient Bayesian Optimization with Transfer Learning for Heterogeneous Search Spaces
Sep 09, 2024


Bayesian optimization (BO) is a powerful approach to sample-efficient optimization of black-box functions. However, in settings with very few function evaluations, a successful application of BO may require transferring information from historical experiments. These related experiments may not have exactly the same tunable parameters (search spaces), motivating the need for BO with transfer learning for heterogeneous search spaces. In this paper, we propose two methods for this setting. The first approach leverages a Gaussian process (GP) model with a conditional kernel to transfer information between different search spaces. Our second approach treats the missing parameters as hyperparameters of the GP model that can be inferred jointly with the other GP hyperparameters or set to fixed values. We show that these two methods perform well on several benchmark problems.
Approximation-Aware Bayesian Optimization
Jun 06, 2024High-dimensional Bayesian optimization (BO) tasks such as molecular design often require 10,000 function evaluations before obtaining meaningful results. While methods like sparse variational Gaussian processes (SVGPs) reduce computational requirements in these settings, the underlying approximations result in suboptimal data acquisitions that slow the progress of optimization. In this paper we modify SVGPs to better align with the goals of BO: targeting informed data acquisition rather than global posterior fidelity. Using the framework of utility-calibrated variational inference, we unify GP approximation and data acquisition into a joint optimization problem, thereby ensuring optimal decisions under a limited computational budget. Our approach can be used with any decision-theoretic acquisition function and is compatible with trust region methods like TuRBO. We derive efficient joint objectives for the expected improvement and knowledge gradient acquisition functions in both the standard and batch BO settings. Our approach outperforms standard SVGPs on high-dimensional benchmark tasks in control and molecular design.
Unexpected Improvements to Expected Improvement for Bayesian Optimization
Oct 31, 2023



Expected Improvement (EI) is arguably the most popular acquisition function in Bayesian optimization and has found countless successful applications, but its performance is often exceeded by that of more recent methods. Notably, EI and its variants, including for the parallel and multi-objective settings, are challenging to optimize because their acquisition values vanish numerically in many regions. This difficulty generally increases as the number of observations, dimensionality of the search space, or the number of constraints grow, resulting in performance that is inconsistent across the literature and most often sub-optimal. Herein, we propose LogEI, a new family of acquisition functions whose members either have identical or approximately equal optima as their canonical counterparts, but are substantially easier to optimize numerically. We demonstrate that numerical pathologies manifest themselves in "classic" analytic EI, Expected Hypervolume Improvement (EHVI), as well as their constrained, noisy, and parallel variants, and propose corresponding reformulations that remedy these pathologies. Our empirical results show that members of the LogEI family of acquisition functions substantially improve on the optimization performance of their canonical counterparts and surprisingly, are on par with or exceed the performance of recent state-of-the-art acquisition functions, highlighting the understated role of numerical optimization in the literature.
Bayesian Optimization over High-Dimensional Combinatorial Spaces via Dictionary-based Embeddings
Mar 03, 2023



We consider the problem of optimizing expensive black-box functions over high-dimensional combinatorial spaces which arises in many science, engineering, and ML applications. We use Bayesian Optimization (BO) and propose a novel surrogate modeling approach for efficiently handling a large number of binary and categorical parameters. The key idea is to select a number of discrete structures from the input space (the dictionary) and use them to define an ordinal embedding for high-dimensional combinatorial structures. This allows us to use existing Gaussian process models for continuous spaces. We develop a principled approach based on binary wavelets to construct dictionaries for binary spaces, and propose a randomized construction method that generalizes to categorical spaces. We provide theoretical justification to support the effectiveness of the dictionary-based embeddings. Our experiments on diverse real-world benchmarks demonstrate the effectiveness of our proposed surrogate modeling approach over state-of-the-art BO methods.
Bayesian Optimization over Discrete and Mixed Spaces via Probabilistic Reparameterization
Oct 18, 2022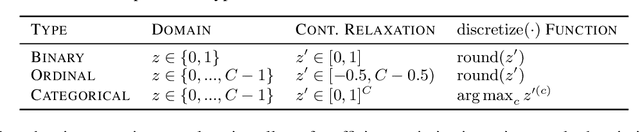
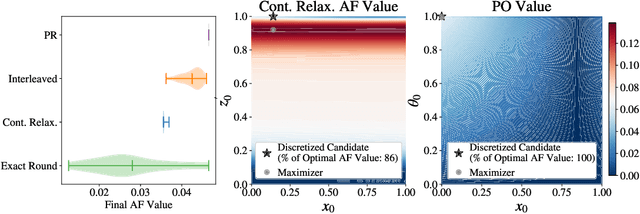

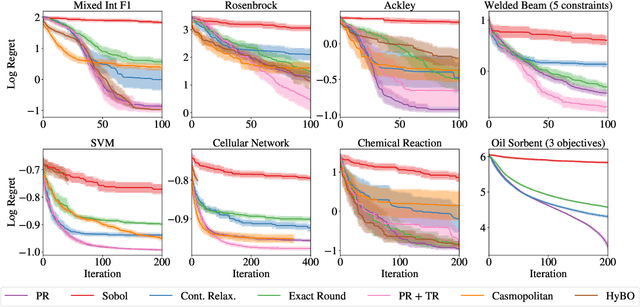
Optimizing expensive-to-evaluate black-box functions of discrete (and potentially continuous) design parameters is a ubiquitous problem in scientific and engineering applications. Bayesian optimization (BO) is a popular, sample-efficient method that leverages a probabilistic surrogate model and an acquisition function (AF) to select promising designs to evaluate. However, maximizing the AF over mixed or high-cardinality discrete search spaces is challenging standard gradient-based methods cannot be used directly or evaluating the AF at every point in the search space would be computationally prohibitive. To address this issue, we propose using probabilistic reparameterization (PR). Instead of directly optimizing the AF over the search space containing discrete parameters, we instead maximize the expectation of the AF over a probability distribution defined by continuous parameters. We prove that under suitable reparameterizations, the BO policy that maximizes the probabilistic objective is the same as that which maximizes the AF, and therefore, PR enjoys the same regret bounds as the original BO policy using the underlying AF. Moreover, our approach provably converges to a stationary point of the probabilistic objective under gradient ascent using scalable, unbiased estimators of both the probabilistic objective and its gradient. Therefore, as the number of starting points and gradient steps increase, our approach will recover of a maximizer of the AF (an often-neglected requisite for commonly used BO regret bounds). We validate our approach empirically and demonstrate state-of-the-art optimization performance on a wide range of real-world applications. PR is complementary to (and benefits) recent work and naturally generalizes to settings with multiple objectives and black-box constraints.