 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomating Vascular Shunt Insertion with the dVRK Surgical Robot
Nov 04, 2022Vascular shunt insertion is a fundamental surgical procedure used to temporarily restore blood flow to tissues. It is often performed in the field after major trauma. We formulate a problem of automated vascular shunt insertion and propose a pipeline to perform Automated Vascular Shunt Insertion (AVSI) using a da Vinci Research Kit. The pipeline uses a learned visual model to estimate the locus of the vessel rim, plans a grasp on the rim, and moves to grasp at that point. The first robot gripper then pulls the rim to stretch open the vessel with a dilation motion. The second robot gripper then proceeds to insert a shunt into the vessel phantom (a model of the blood vessel) with a chamfer tilt followed by a screw motion. Results suggest that AVSI achieves a high success rate even with tight tolerances and varying vessel orientations up to 30{\deg}. Supplementary material, dataset, videos, and visualizations can be found at https://sites.google.com/berkeley.edu/autolab-avsi.
Learning to Localize, Grasp, and Hand Over Unmodified Surgical Needles
Dec 08, 2021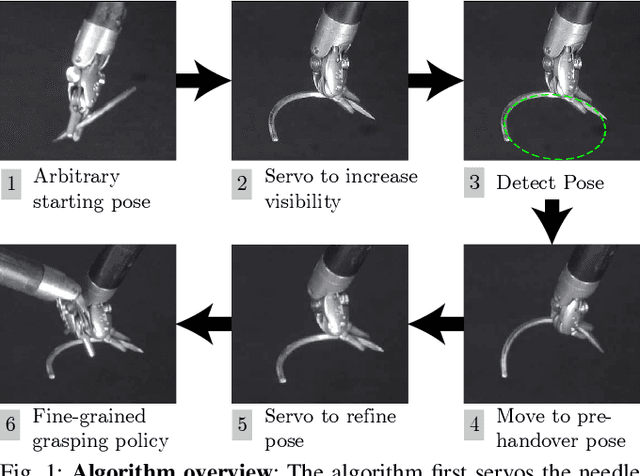
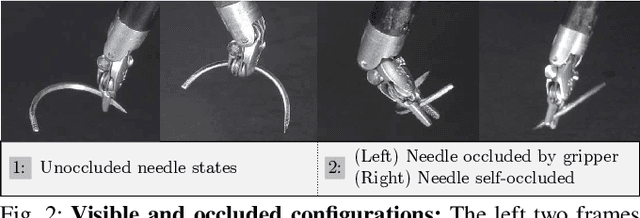
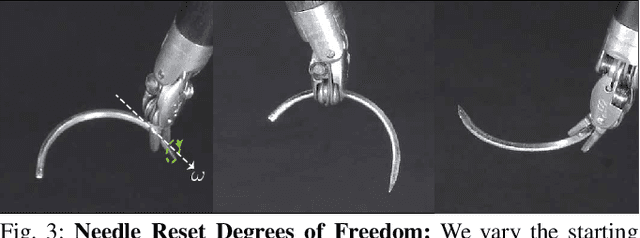
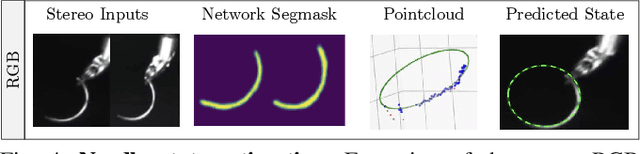
Robotic Surgical Assistants (RSAs) are commonly used to perform minimally invasive surgeries by expert surgeons. However, long procedures filled with tedious and repetitive tasks such as suturing can lead to surgeon fatigue, motivating the automation of suturing. As visual tracking of a thin reflective needle is extremely challenging, prior work has modified the needle with nonreflective contrasting paint. As a step towards automation of a suturing subtask without modifying the needle, we propose HOUSTON: Handoff of Unmodified, Surgical, Tool-Obstructed Needles, a problem and algorithm that uses a learned active sensing policy with a stereo camera to localize and align the needle into a visible and accessible pose for the other arm. To compensate for robot positioning and needle perception errors, the algorithm then executes a high-precision grasping motion that uses multiple cameras. In physical experiments using the da Vinci Research Kit (dVRK), HOUSTON successfully passes unmodified surgical needles with a success rate of 96.7% and is able to perform handover sequentially between the arms 32.4 times on average before failure. On needles unseen in training, HOUSTON achieves a success rate of 75 - 92.9%. To our knowledge, this work is the first to study handover of unmodified surgical needles. See https://tinyurl.com/houston-surgery for additional materials.
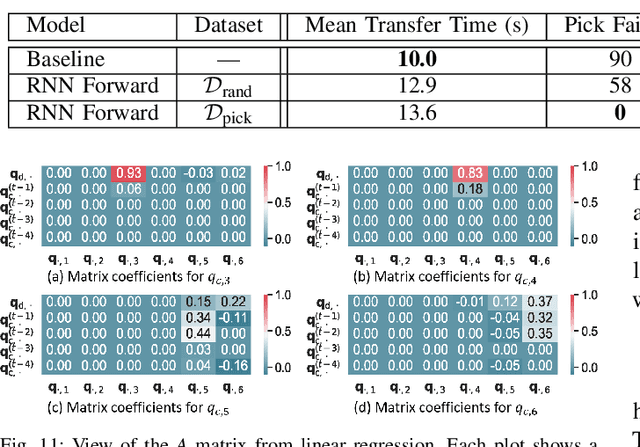
Superhuman Surgical Peg Transfer Using Depth-Sensing and Deep Recurrent Neural Networks
Dec 24, 2020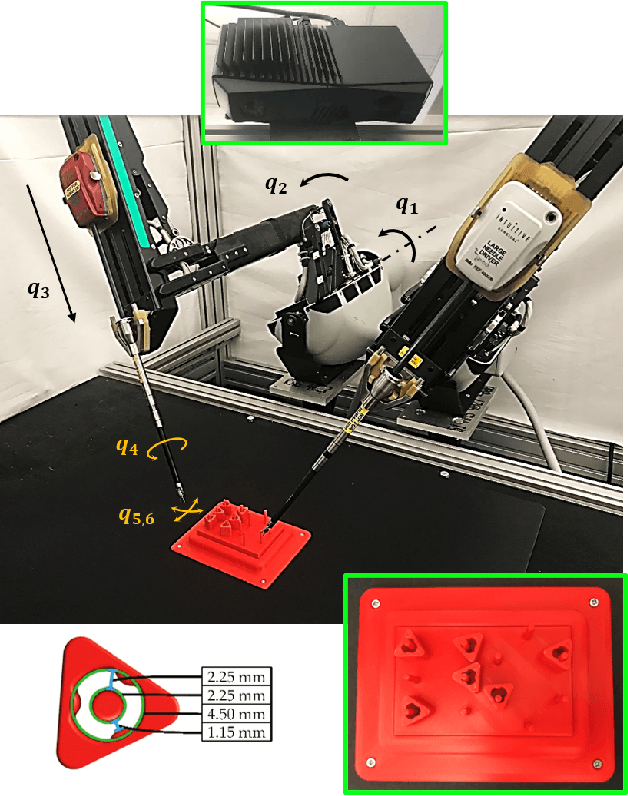
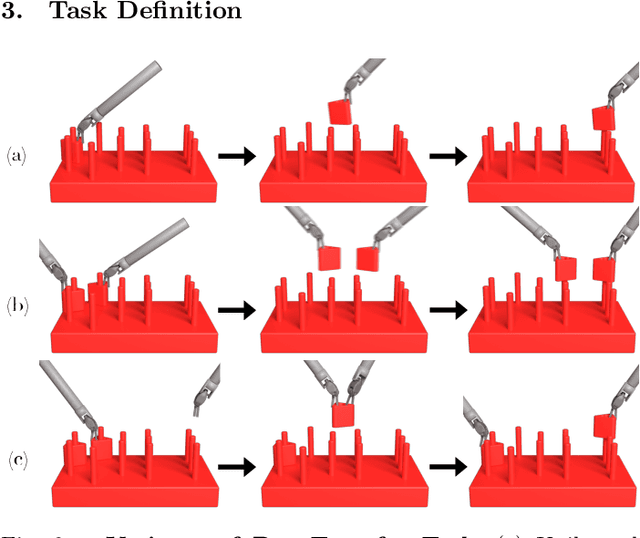
We consider the automation of the well-known peg-transfer task from the Fundamentals of Laparoscopic Surgery (FLS). While human surgeons teleoperate robots to perform this task with great dexterity, it remains challenging to automate. We present an approach that leverages emerging innovations in depth sensing, deep learning, and Peiper's method for computing inverse kinematics with time-minimized joint motion. We use the da Vinci Research Kit (dVRK) surgical robot with a Zivid depth sensor, and automate three variants of the peg-transfer task: unilateral, bilateral without handovers, and bilateral with handovers. We use 3D-printed fiducial markers with depth sensing and a deep recurrent neural network to improve the precision of the dVRK to less than 1 mm. We report experimental results for 1800 block transfer trials. Results suggest that the fully automated system can outperform an experienced human surgical resident, who performs far better than untrained humans, in terms of both speed and success rate. For the most difficult variant of peg transfer (with handovers) we compare the performance of the surgical resident with performance of the automated system over 120 trials for each. The experienced surgical resident achieves success rate 93.2 % with mean transfer time of 8.6 seconds. The automated system achieves success rate 94.1 % with mean transfer time of 8.1 seconds. To our knowledge this is the first fully automated system to achieve "superhuman" performance in both speed and success on peg transfer. Supplementary material is available at https://sites.google.com/view/surgicalpegtransfer.
Intermittent Visual Servoing: Efficiently Learning Policies Robust to Instrument Changes for High-precision Surgical Manipulation
Nov 12, 2020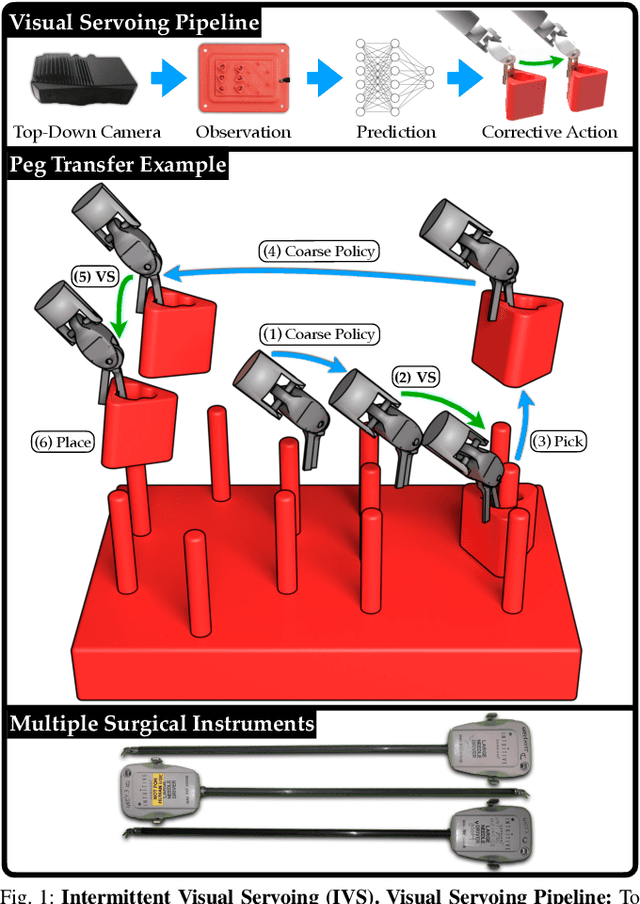
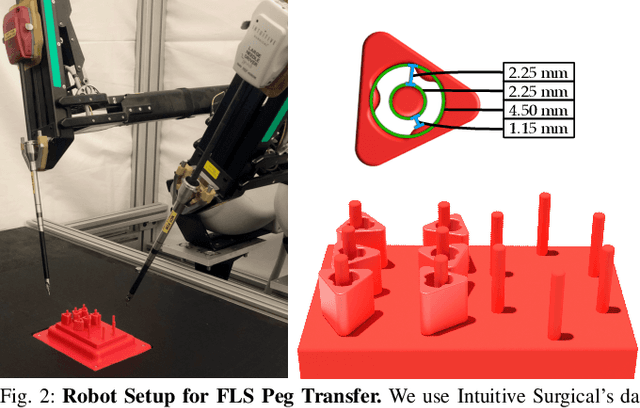
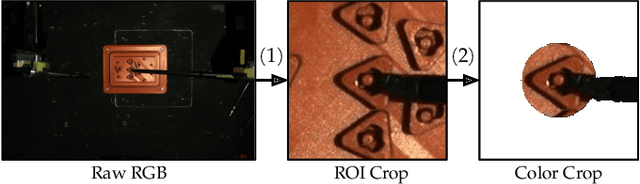
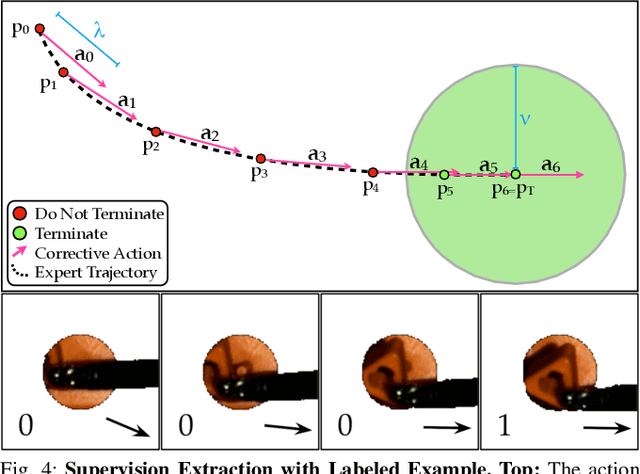
Automation of surgical tasks using cable-driven robots is challenging due to backlash, hysteresis, and cable tension, and these issues are exacerbated as surgical instruments must often be changed during an operation. In this work, we propose a framework for automation of high-precision surgical tasks by learning sample efficient, accurate, closed-loop policies that operate directly on visual feedback instead of robot encoder estimates. This framework, which we call intermittent visual servoing (IVS), intermittently switches to a learned visual servo policy for high-precision segments of repetitive surgical tasks while relying on a coarse open-loop policy for the segments where precision is not necessary. To compensate for cable-related effects, we apply imitation learning to rapidly train a policy that maps images of the workspace and instrument from a top-down RGB camera to small corrective motions. We train the policy using only 180 human demonstrations that are roughly 2 seconds each. Results on a da Vinci Research Kit suggest that combining the coarse policy with half a second of corrections from the learned policy during each high-precision segment improves the success rate on the Fundamentals of Laparoscopic Surgery peg transfer task from 72.9% to 99.2%, 31.3% to 99.2%, and 47.2% to 100.0% for 3 instruments with differing cable-related effects. In the contexts we studied, IVS attains the highest published success rates for automated surgical peg transfer and is significantly more reliable than previous techniques when instruments are changed. Supplementary material is available at https://tinyurl.com/ivs-icra.
Efficiently Calibrating Cable-Driven Surgical Robots With RGBD Sensing, Temporal Windowing, and Linear and Recurrent Neural Network Compensation
Mar 19, 2020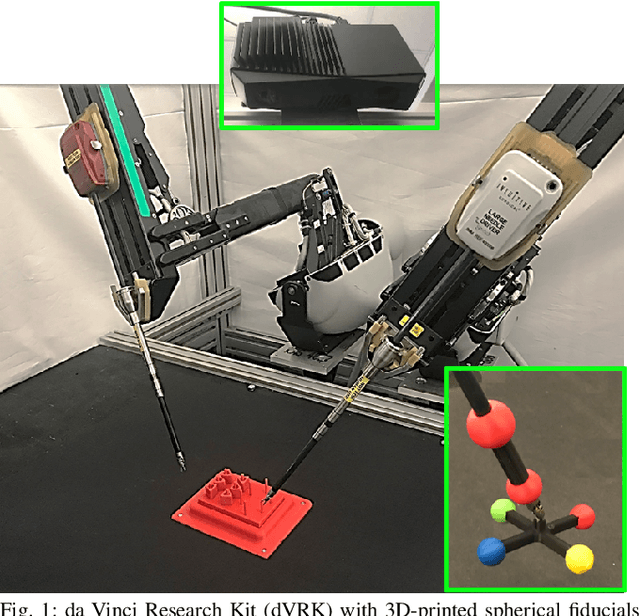
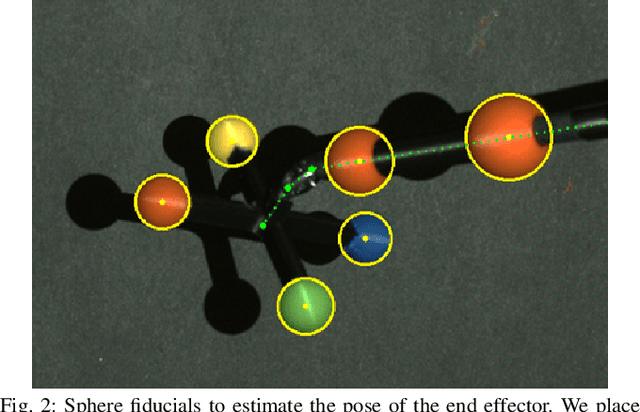
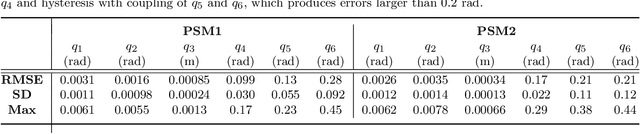
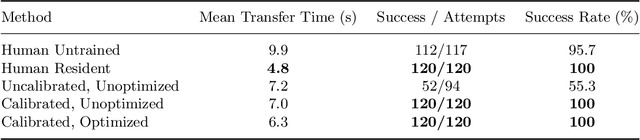
Automation of surgical subtasks using cable-driven robotic surgical assistants (RSAs) such as Intuitive Surgical's da Vinci Research Kit (dVRK) is challenging due to imprecision in control from cable-related effects such as backlash, stretch, and hysteresis. We propose a novel approach to efficiently calibrate a dVRK by placing a 3D printed fiducial coordinate frame on the arm and end-effector that is tracked using RGBD sensing. To measure the coupling effects between joints and history-dependent effects, we analyze data from sampled trajectories and consider 13 modeling approaches using LSTM recurrent neural networks and linear models with varying temporal window length to provide corrective feedback. With the proposed method, data collection takes 31 minutes to produce 1800 samples and model training takes less than a minute. Results suggest that the resulting model can reduce the mean tracking error of the physical robot from 2.96mm to 0.65mm on a test set of reference trajectories. We evaluate the model by executing open-loop trajectories of the FLS peg transfer surgeon training task. Results suggest that the best approach increases success rate from 39.4% to 96.7% comparable to the performance of an expert surgical resident. Supplementary material, including 3D-printable models, is available at https://sites.google.com/berkeley.edu/surgical-calibration.
On the Effectiveness of Virtual Reality-based Training for Robotic Setup
Mar 03, 2020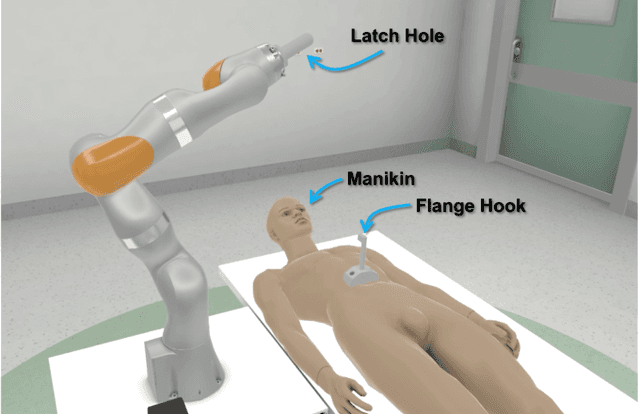
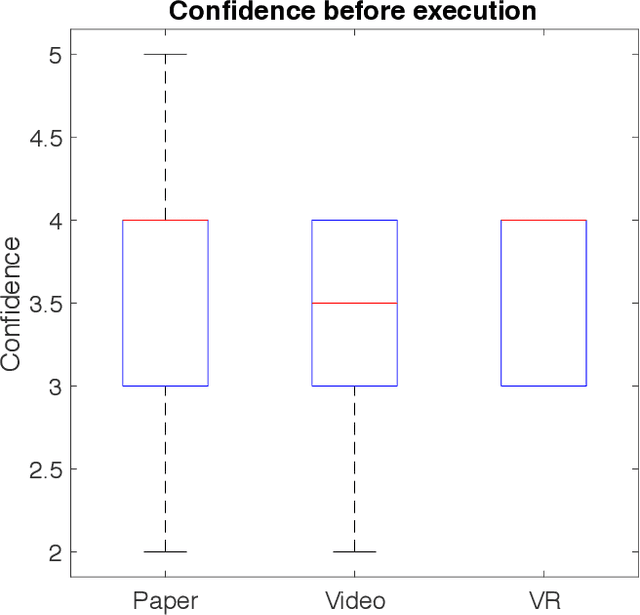
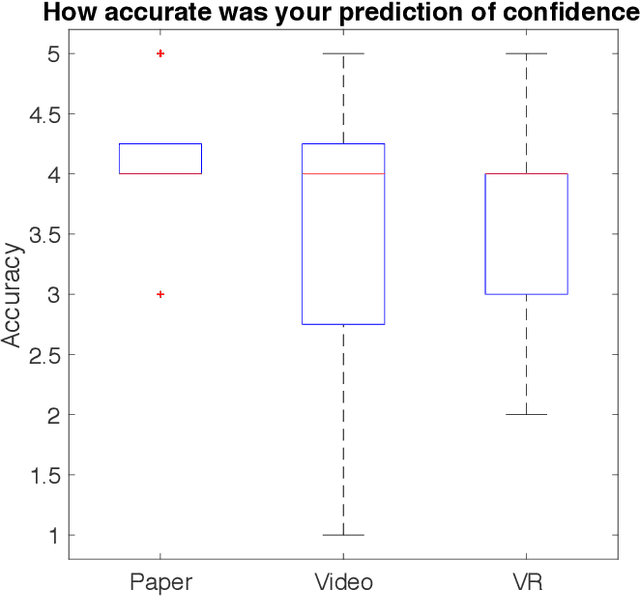
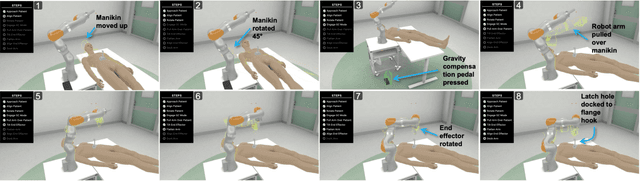
Virtual Reality (VR) is rapidly increasing in popularity as a teaching tool. It allows for the creation of a highly immersive, three-dimensional virtual environment intended to simulate real-life environments. With more robots saturating the industry - from manufacturing to healthcare, there is a need to train end-users on how to set up, operate, tear down, and troubleshoot the robot. Even though VR has become widely used in training surgeons on the psychomotor skills associated with operating the robot, little research has been done to see how the benefits of VR could translate to teaching the bedside staff, tasked with supporting the robot during the full end-to-end surgical procedure. We trained 30 participants on how to set up a robotic arm in an environment mimicking clinical setup. We divided these participants equally into 3 groups with one group trained with paper-based instructions, one with video-based instructions and one with VR-based instructions. We then compared and contrasted these three different training methods. VR and paper-based were highly favored training mediums over video-based. VR-trained participants achieved slightly higher fidelity of individual robotic joint angles, suggesting better comprehension of the spatial awareness skills necessary to achieve desired arm positioning. In addition, VR resulted in higher reproducibility of setup fidelity and more consistency in user confidence levels as compared to paper and video-based training.
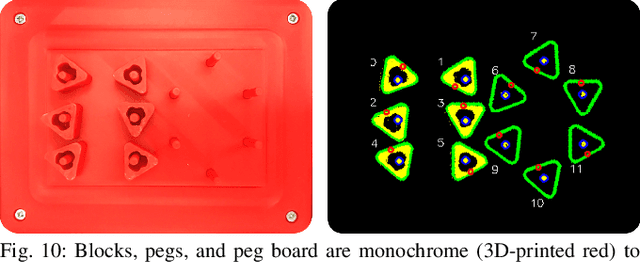
Applying Depth-Sensing to Automated Surgical Manipulation with a da Vinci Robot
Feb 15, 2020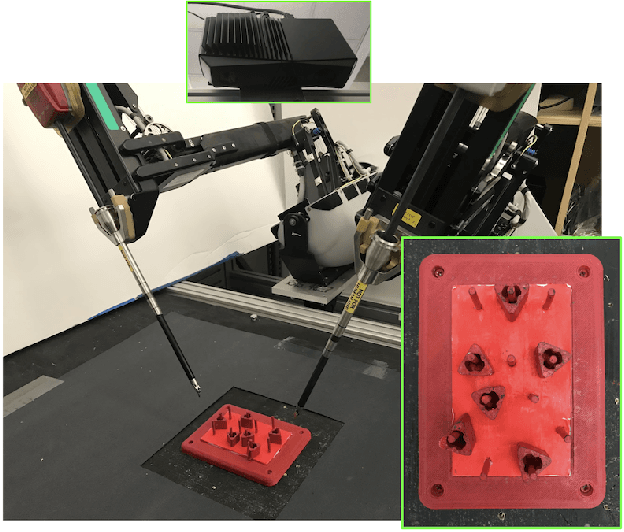
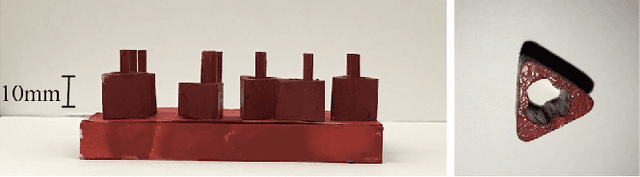
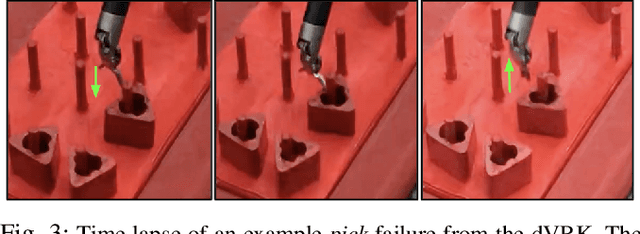
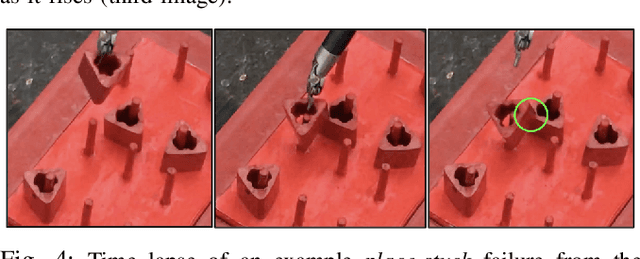
Recent advances in depth-sensing have significantly increased accuracy, resolution, and frame rate, as shown in the 1920x1200 resolution and 13 frames per second Zivid RGBD camera. In this study, we explore the potential of depth sensing for efficient and reliable automation of surgical subtasks. We consider a monochrome (all red) version of the peg transfer task from the Fundamentals of Laparoscopic Surgery training suite implemented with the da Vinci Research Kit (dVRK). We use calibration techniques that allow the imprecise, cable-driven da Vinci to reduce error from 4-5 mm to 1-2 mm in the task space. We report experimental results for a handover-free version of the peg transfer task, performing 20 and 5 physical episodes with single- and bilateral-arm setups, respectively. Results over 236 and 49 total block transfer attempts for the single- and bilateral-arm peg transfer cases suggest that reliability can be attained with 86.9 % and 78.0 % for each individual block, with respective block transfer speeds of 10.02 and 5.72 seconds. Supplementary material is available at https://sites.google.com/view/peg-transfer.