 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV-CodeAgents: Scalable UAV Mission Planning via Multi-Agent ReAct and Vision-Language Reasoning
May 12, 2025



We present UAV-CodeAgents, a scalable multi-agent framework for autonomous UAV mission generation, built on large language and vision-language models (LLMs/VLMs). The system leverages the ReAct (Reason + Act) paradigm to interpret satellite imagery, ground high-level natural language instructions, and collaboratively generate UAV trajectories with minimal human supervision. A core component is a vision-grounded, pixel-pointing mechanism that enables precise localization of semantic targets on aerial maps. To support real-time adaptability, we introduce a reactive thinking loop, allowing agents to iteratively reflect on observations, revise mission goals, and coordinate dynamically in evolving environments. UAV-CodeAgents is evaluated on large-scale mission scenarios involving industrial and environmental fire detection. Our results show that a lower decoding temperature (0.5) yields higher planning reliability and reduced execution time, with an average mission creation time of 96.96 seconds and a success rate of 93%. We further fine-tune Qwen2.5VL-7B on 9,000 annotated satellite images, achieving strong spatial grounding across diverse visual categories. To foster reproducibility and future research, we will release the full codebase and a novel benchmark dataset for vision-language-based UAV planning.
Aerial Grasping with Soft Aerial Vehicle Using Disturbance Observer-Based Model Predictive Control
Sep 21, 2024



Aerial grasping, particularly soft aerial grasping, holds significant promise for drone delivery and harvesting tasks. However, controlling UAV dynamics during aerial grasping presents considerable challenges. The increased mass during payload grasping adversely affects thrust prediction, while unpredictable environmental disturbances further complicate control efforts. In this study, our objective aims to enhance the control of the Soft Aerial Vehicle (SAV) during aerial grasping by incorporating a disturbance observer into a Nonlinear Model Predictive Control (NMPC) SAV controller. By integrating the disturbance observer into the NMPC SAV controller, we aim to compensate for dynamic model idealization and uncertainties arising from additional payloads and unpredictable disturbances. Our approach combines a disturbance observer-based NMPC with the SAV controller, effectively minimizing tracking errors and enabling precise aerial grasping along all three axes. The proposed SAV equipped with Disturbance Observer-based Nonlinear Model Predictive Control (DOMPC) demonstrates remarkable capabilities in handling both static and non-static payloads, leading to the successful grasping of various objects. Notably, our SAV achieves an impressive payload-to-weight ratio, surpassing previous investigations in the domain of soft grasping. Using the proposed soft aerial vehicle weighing 1.002 kg, we achieve a maximum payload of 337 g by grasping.
Towards Non-Robocentric Dynamic Landing of Quadrotor UAVs
Jan 21, 2024In this work, we propose a dynamic landing solution without the need for onboard exteroceptive sensors and an expensive computation unit, where all localization and control modules are carried out on the ground in a non-inertial frame. Our system starts with a relative state estimator of the aerial robot from the perspective of the landing platform, where the state tracking of the UAV is done through a set of onboard LED markers and an on-ground camera; the state is expressed geometrically on manifold, and is returned by Iterated Extended Kalman filter (IEKF) algorithm. Subsequently, a motion planning module is developed to guide the landing process, formulating it as a minimum jerk trajectory by applying the differential flatness property. Considering visibility and dynamic constraints, the problem is solved using quadratic programming, and the final motion primitive is expressed through piecewise polynomials. Through a series of experiments, the applicability of this approach is validated by successfully landing 18 cm x 18 cm quadrotor on a 43 cm x 43 cm platform, exhibiting performance comparable to conventional methods. Finally, we provide comprehensive hardware and software details to the research community for future reference.
Hybrid Aerodynamics-Based Model Predictive Control for a Tail-Sitter UAV
Dec 22, 2023It is challenging to model and control a tail-sitter unmanned aerial vehicle (UAV) because its blended wing body generates complicated nonlinear aerodynamic effects, such as wing lift, fuselage drag, and propeller-wing interactions. We therefore devised a hybrid aerodynamic modeling method and model predictive control (MPC) design for a quadrotor tail-sitter UAV. The hybrid model consists of the Newton-Euler equation, which describes quadrotor dynamics, and a feedforward neural network, which learns residual aerodynamic effects. This hybrid model exhibits high predictive accuracy at a low computational cost and was used to implement hybrid MPC, which optimizes the throttle, pitch angle, and roll angle for position tracking. The controller performance was validated in real-world experiments, which obtained a 57% tracking error reduction compared with conventional nonlinear MPC. External wind disturbance was also introduced and the experimental results confirmed the robustness of the controller to these conditions.
A Modular Pneumatic Soft Gripper Design for Aerial Grasping and Landing
Nov 01, 2023Aerial robots have garnered significant attention due to their potential applications in various industries, such as inspection, search and rescue, and drone delivery. However, the ability of these robots to effectively grasp and land on objects or surfaces is often crucial for the successful completion of missions. This paper presents a novel modular soft gripper design tailored explicitly for aerial grasping and landing operations. The proposed modular pneumatic soft gripper incorporates a feed-forward proportional controller to regulate pressure, enabling compliant gripping capabilities. The modular connectors of the soft fingers offer two configurations of the 4-finger soft gripper, H-base and X-base, allowing adaptability to different target objects. Furthermore, when deflated, the gripper can function as a soft landing gear, reducing the weight and complexity of aerial manipulation control and enhancing flight efficiency. We demonstrate the efficacy of indoor aerial grasping and achieve a maximum payload of 217 g for the proposed soft aerial vehicle (SAV), with the weight of the soft drone being 808 g.
A Fast Planning Approach for 3D Short Trajectory with a Parallel Framework
Oct 20, 2021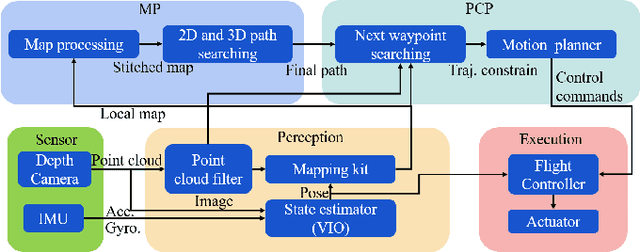

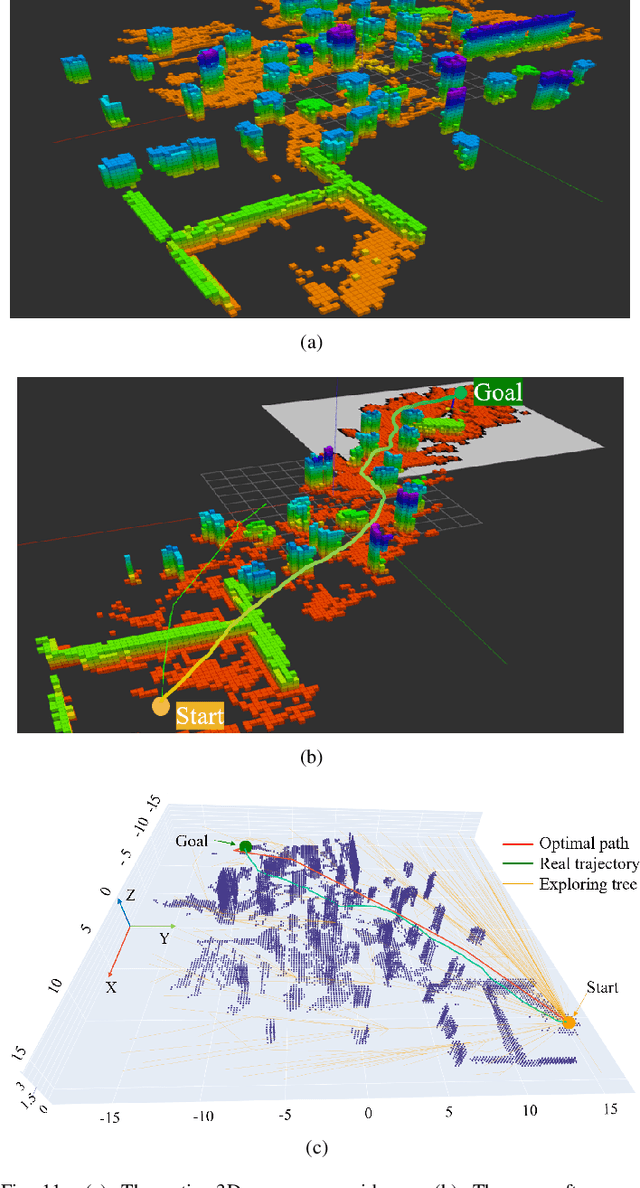
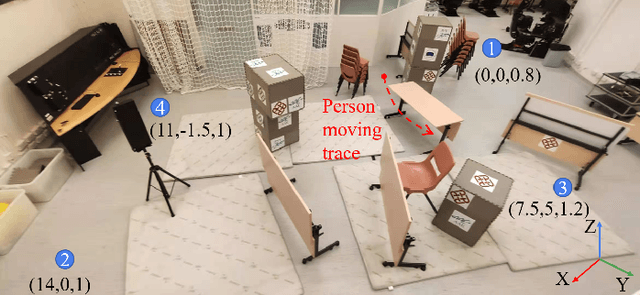
For real applications of unmanned aerial vehicles, the capability of navigating with full autonomy in unknown environments is a crucial requirement. However, planning a shorter path with less computing time is contradictory. To address this problem, we present a framework with the map planner and point cloud planner running in parallel in this paper. The map planner determines the initial path using the improved jump point search method on the 2D map, and then it tries to optimize the path by considering a possible shorter 3D path. The point cloud planner is executed at a high frequency to generate the motion primitives. It makes the drone follow the solved path and avoid the suddenly appearing obstacles nearby. Thus, vehicles can achieve a short trajectory while reacting quickly to the intruding obstacles. We demonstrate fully autonomous quadrotor flight tests in unknown and complex environments with static and dynamic obstacles to validate the proposed method. In simulation and hardware experiments, the proposed framework shows satisfactorily comprehensive performance.
Stereo Visual Inertial Pose Estimation Based on Feedforward-Feedback Loops
Jul 13, 2020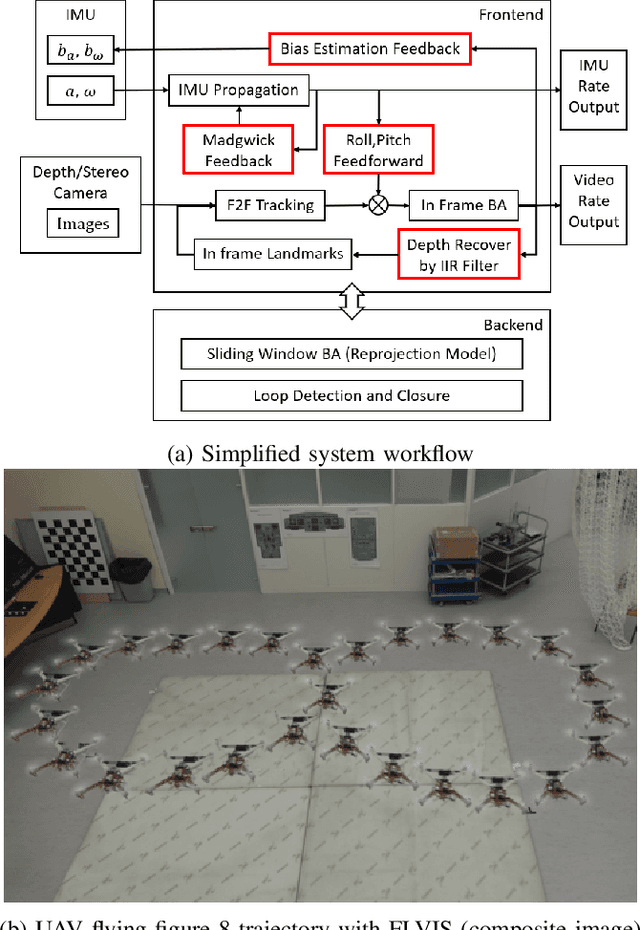
In this paper, we present a novel stereo visual inertial pose estimation method. Compared to the widely used filter-based or optimization-based approaches, the pose estimation process is modeled as a control system. Designed feedback or feedforward loops are introduced to achieve the stable control of the system, which include a gradient decreased feedback loop, a roll-pitch feed forward loop and a bias estimation feedback loop. This system, named FLVIS (Feedforward-feedback Loop-based Visual Inertial System), is evaluated on the popular EuRoc MAV dataset. FLVIS achieves high accuracy and robustness with respect to other state-of-the-art visual SLAM approaches. The system has also been implemented and tested on a UAV platform. The source code of this research is public to the research community.