 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysReflect-VLA: Physical Feasibility and Self-Reflective Regulation for Reliable Vision-Language-Action Policies
Jun 25, 2026Long-horizon robotic manipulation is highly sensitive to physically infeasible transitions, contact-induced disturbances, and the lack of effective self-correction during execution. Although Vision-Language-Action (VLA) models provide strong task grounding through multimodal learning, they typically generate actions in a feed-forward manner without explicitly checking physical feasibility or diagnosing execution errors online. We present PhysReflect-VLA, a plug-and-play execution-time reliability framework that augments VLA policies with physical feasibility evaluation and structured self-reflection in a closed-loop control pipeline. A Feasibility Operator evaluates whether candidate actions induce dynamically consistent state transitions; an Action Explanation Operator verifies transition coherence; and an LLM-based Reflection Module analyzes state discrepancies to generate corrective guidance for subsequent actions. A two-stage training procedure stabilizes feasibility modeling and integrates reflection into the control loop. Experiments on multi-stage, contact-rich real-world manipulation tasks show consistent improvements in stage-wise stability and overall task success compared with representative VLA baselines with an average gain of 5.4\%. Ablation results further indicate that feasibility checking and reflection-based correction both contribute to improved execution robustness. These results highlight the importance of embedding physical consistency checks and online self-reflection for reliable long-horizon robotic manipulation.
PAMAE: Phase-Aware-MoE Action Experts Towards Reliable Flow-Matching Vision-Language-Action Policies
Jun 25, 2026Reliable action generation for multi-stage robotic manipulation remains challenging for Vision-Language-Action (VLA) models. While existing flow-matching VLA policies offer strong multimodal grounding and generalization, they typically employ a single shared action expert, limiting their ability to capture phase-specific control patterns across distinct execution stages. We propose a plug-and-play Phase-Aware Mixture-of-Experts Action Module (PAMAE), as a step towards more reliable phase-consistent action generation. PAMAE replaces the original flow-matching action expert with a sparse expert mixture while preserving the pretrained VLA backbone. PAMAE introduces a phase-aware router that leverages execution-phase cues to allocate action generation across experts, supported by a lightweight phase prediction head and a routing alignment objective. To stabilize specialization, we adopt a two-stage training scheme that first warms up the expert module under the standard flow-matching loss and then optimizes phase-consistent routing under auxiliary supervision. On multi-stage manipulation simulation tasks, PAMAE improves task success by up to \textbf{9.2\%} over strong VLA baselines. Further ablations show that both phase-supervised routing and staged optimization are essential for the observed gains. Our results highlight phase-consistent expert allocation as an effective mechanism for improving the reliability and action quality of flow-matching VLA policies.
Pansharpening for Thin-Cloud Contaminated Remote Sensing Images: A Unified Framework and Benchmark Dataset
Mar 16, 2026Pansharpening under thin cloudy conditions is a practically significant yet rarely addressed task, challenged by simultaneous spatial resolution degradation and cloud-induced spectral distortions. Existing methods often address cloud removal and pansharpening sequentially, leading to cumulative errors and suboptimal performance due to the lack of joint degradation modeling. To address these challenges, we propose a Unified Pansharpening Model with Thin Cloud Removal (Pan-TCR), an end-to-end framework that integrates physical priors. Motivated by theoretical analysis in the frequency domain, we design a frequency-decoupled restoration (FDR) block that disentangles the restoration of multispectral image (MSI) features into amplitude and phase components, each guided by complementary degradation-robust prompts: the near-infrared (NIR) band amplitude for cloud-resilient restoration, and the panchromatic (PAN) phase for high-resolution structural enhancement. To ensure coherence between the two components, we further introduce an interactive inter-frequency consistency (IFC) module, enabling cross-modal refinement that enforces consistency and robustness across frequency cues. Furthermore, we introduce the first real-world thin-cloud contaminated pansharpening dataset (PanTCR-GF2), comprising paired clean and cloudy PAN-MSI images, to enable robust benchmarking under realistic conditions. Extensive experiments on real-world and synthetic datasets demonstrate the superiority and robustness of Pan-TCR, establishing a new benchmark for pansharpening under realistic atmospheric degradations.
3C: Confidence-Guided Clustering and Contrastive Learning for Unsupervised Person Re-Identification
Aug 18, 2024



Unsupervised person re-identification (Re-ID) aims to learn a feature network with cross-camera retrieval capability in unlabelled datasets. Although the pseudo-label based methods have achieved great progress in Re-ID, their performance in the complex scenario still needs to sharpen up. In order to reduce potential misguidance, including feature bias, noise pseudo-labels and invalid hard samples, accumulated during the learning process, in this pa per, a confidence-guided clustering and contrastive learning (3C) framework is proposed for unsupervised person Re-ID. This 3C framework presents three confidence degrees. i) In the clustering stage, the confidence of the discrepancy between samples and clusters is proposed to implement a harmonic discrepancy clustering algorithm (HDC). ii) In the forward-propagation training stage, the confidence of the camera diversity of a cluster is evaluated via a novel camera information entropy (CIE). Then, the clusters with high CIE values will play leading roles in training the model. iii) In the back-propagation training stage, the confidence of the hard sample in each cluster is designed and further used in a confidence integrated harmonic discrepancy (CHD), to select the informative sample for updating the memory in contrastive learning. Extensive experiments on three popular Re-ID benchmarks demonstrate the superiority of the proposed framework. Particularly, the 3C framework achieves state-of-the-art results: 86.7%/94.7%, 45.3%/73.1% and 47.1%/90.6% in terms of mAP/Rank-1 accuracy on Market-1501, the com plex datasets MSMT17 and VeRi-776, respectively. Code is available at https://github.com/stone5265/3C-reid.
Error Controlled Actor-Critic
Sep 07, 2021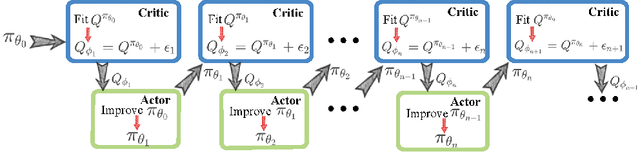
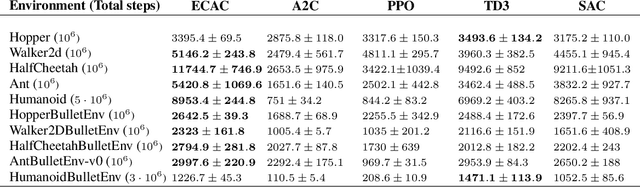
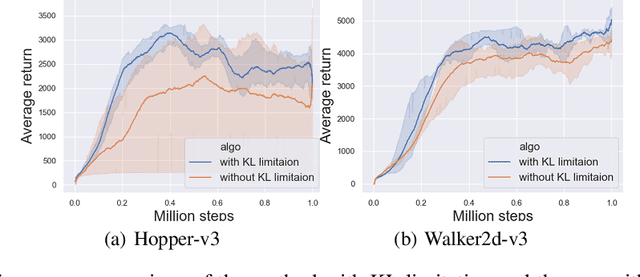
On error of value function inevitably causes an overestimation phenomenon and has a negative impact on the convergence of the algorithms. To mitigate the negative effects of the approximation error, we propose Error Controlled Actor-critic which ensures confining the approximation error in value function. We present an analysis of how the approximation error can hinder the optimization process of actor-critic methods.Then, we derive an upper boundary of the approximation error of Q function approximator and find that the error can be lowered by restricting on the KL-divergence between every two consecutive policies when training the policy. The results of experiments on a range of continuous control tasks demonstrate that the proposed actor-critic algorithm apparently reduces the approximation error and significantly outperforms other model-free RL algorithms.