 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhasing Through the Flames: Rapid Motion Planning with the AGHF PDE for Arbitrary Objective Functions and Constraints
May 02, 2025The generation of optimal trajectories for high-dimensional robotic systems under constraints remains computationally challenging due to the need to simultaneously satisfy dynamic feasibility, input limits, and task-specific objectives while searching over high-dimensional spaces. Recent approaches using the Affine Geometric Heat Flow (AGHF) Partial Differential Equation (PDE) have demonstrated promising results, generating dynamically feasible trajectories for complex systems like the Digit V3 humanoid within seconds. These methods efficiently solve trajectory optimization problems over a two-dimensional domain by evolving an initial trajectory to minimize control effort. However, these AGHF approaches are limited to a single type of optimal control problem (i.e., minimizing the integral of squared control norms) and typically require initial guesses that satisfy constraints to ensure satisfactory convergence. These limitations restrict the potential utility of the AGHF PDE especially when trying to synthesize trajectories for robotic systems. This paper generalizes the AGHF formulation to accommodate arbitrary cost functions, significantly expanding the classes of trajectories that can be generated. This work also introduces a Phase1 - Phase 2 Algorithm that enables the use of constraint-violating initial guesses while guaranteeing satisfactory convergence. The effectiveness of the proposed method is demonstrated through comparative evaluations against state-of-the-art techniques across various dynamical systems and challenging trajectory generation problems. Project Page: https://roahmlab.github.io/BLAZE/
Bring the Heat: Rapid Trajectory Optimization with Pseudospectral Techniques and the Affine Geometric Heat Flow Equation
Nov 20, 2024



Generating optimal trajectories for high-dimensional robotic systems in a time-efficient manner while adhering to constraints is a challenging task. To address this challenge, this paper introduces PHLAME, which applies pseudospectral collocation and spatial vector algebra to efficiently solve the Affine Geometric Heat Flow (AGHF) Partial Differential Equation (PDE) for trajectory optimization. Unlike traditional PDE approaches like the Hamilton-Jacobi-Bellman (HJB) PDE, which solve for a function over the entire state space, computing a solution to the AGHF PDE scales more efficiently because its solution is defined over a two-dimensional domain, thereby avoiding the intractability of state-space scaling. To solve the AGHF one usually applies the Method of Lines (MOL), which works by discretizing one variable of the AGHF PDE, effectively converting the PDE into a system of ordinary differential equations (ODEs) that can be solved using standard time-integration methods. Though powerful, this method requires a fine discretization to generate accurate solutions and still requires evaluating the AGHF PDE which can be computationally expensive for high-dimensional systems. PHLAME overcomes this deficiency by using a pseudospectral method, which reduces the number of function evaluations required to yield a high accuracy solution thereby allowing it to scale efficiently to high-dimensional robotic systems. To further increase computational speed, this paper presents analytical expressions for the AGHF and its Jacobian, both of which can be computed efficiently using rigid body dynamics algorithms. The proposed method PHLAME is tested across various dynamical systems, with and without obstacles and compared to a number of state-of-the-art techniques. PHLAME generates trajectories for a 44-dimensional state-space system in $\sim3$ seconds, much faster than current state-of-the-art techniques.
Let's Make a Splan: Risk-Aware Trajectory Optimization in a Normalized Gaussian Splat
Sep 25, 2024



Neural Radiance Fields and Gaussian Splatting have transformed the field of computer vision by enabling photo-realistic representation of complex scenes. Despite this success, they have seen only limited use in real-world robotics tasks such as trajectory optimization. Two key factors have contributed to this limited success. First, it is challenging to reason about collisions in radiance models. Second, it is difficult to perform inference of radiance models fast enough for real-time trajectory synthesis. This paper addresses these challenges by proposing SPLANNING, a risk-aware trajectory optimizer that operates in a Gaussian Splatting model. This paper first derives a method for rigorously upper-bounding the probability of collision between a robot and a radiance field. Second, this paper introduces a normalized reformulation of Gaussian Splatting that enables the efficient computation of the collision bound in a Gaussian Splat. Third, a method is presented to optimize trajectories while avoiding collisions with a scene represented by a Gaussian Splat. Experiments demonstrate that SPLANNING outperforms state-of-the-art methods in generating collision-free trajectories in highly cluttered environments. The proposed system is also tested on a real-world robot manipulator. A project page is available at https://roahmlab.github.io/splanning.
Reachability-based Trajectory Design via Exact Formulation of Implicit Neural Signed Distance Functions
Mar 18, 2024



Generating receding-horizon motion trajectories for autonomous vehicles in real-time while also providing safety guarantees is challenging. This is because a future trajectory needs to be planned before the previously computed trajectory is completely executed. This becomes even more difficult if the trajectory is required to satisfy continuous-time collision-avoidance constraints while accounting for a large number of obstacles. To address these challenges, this paper proposes a novel real-time, receding-horizon motion planning algorithm named REachability-based trajectory Design via Exact Formulation of Implicit NEural signed Distance functions (REDEFINED). REDEFINED first applies offline reachability analysis to compute zonotope-based reachable sets that overapproximate the motion of the ego vehicle. During online planning, REDEFINED leverages zonotope arithmetic to construct a neural implicit representation that computes the exact signed distance between a parameterized swept volume of the ego vehicle and obstacle vehicles. REDEFINED then implements a novel, real-time optimization framework that utilizes the neural network to construct a collision avoidance constraint. REDEFINED is compared to a variety of state-of-the-art techniques and is demonstrated to successfully enable the vehicle to safely navigate through complex environments. Code, data, and video demonstrations can be found at https://roahmlab.github.io/redefined/.
SKOOTR: A SKating, Omni-Oriented, Tripedal Robot
Feb 06, 2024In both animals and robots, locomotion capabilities are determined by the physical structure of the system. The majority of legged animals and robots are bilaterally symmetric, which facilitates locomotion with consistent headings and obstacle traversal, but leads to constraints in their turning ability. On the other hand, radially symmetric animals have demonstrated rapid turning abilities enabled by their omni-directional body plans. Radially symmetric tripedal robots are able to turn instantaneously, but are commonly constrained by needing to change direction with every step, resulting in inefficient and less stable locomotion. We address these challenges by introducing a novel design for a tripedal robot that has both frictional and rolling contacts. Additionally, a freely rotating central sphere provides an added contact point so the robot can retain a stable tripod base of support while lifting and pushing with any one of its legs. The SKating, Omni-Oriented, Tripedal Robot (SKOOTR) is more versatile and stable than other existing tripedal robots. It is capable of multiple forward gaits, multiple turning maneuvers, obstacle traversal, and stair climbing. SKOOTR has been designed to facilitate customization for diverse applications: it is fully open-source, is constructed with 3D printed or off-the-shelf parts, and costs approximately $500 USD to build.
Not All Actions Are Created Equal: Bayesian Optimal Experimental Design for Safe and Optimal Nonlinear System Identification
Aug 03, 2023Uncertainty in state or model parameters is common in robotics and typically handled by acquiring system measurements that yield information about the uncertain quantities of interest. Inputs to a nonlinear dynamical system yield outcomes that produce varying amounts of information about the underlying uncertain parameters of the system. To maximize information gained with respect to these uncertain parameters we present a Bayesian approach to data collection for system identification called Bayesian Optimal Experimental Design (BOED). The formulation uses parameterized trajectories and cubature to compute maximally informative system trajectories which obtain as much information as possible about unknown system parameters while also ensuring safety under mild assumptions. The proposed method is applicable to non-linear and non-Gaussian systems and is applied to a high-fidelity vehicle model from the literature. It is shown the proposed approach requires orders of magnitude fewer samples compared to state-of-the-art BOED algorithms from the literature while simultaneously providing safety guarantees.
RADIUS: Risk-Aware, Real-Time, Reachability-Based Motion Planning
Feb 15, 2023



Deterministic methods for motion planning guarantee safety amidst uncertainty in obstacle locations by trying to restrict the robot from operating in any possible location that an obstacle could be in. Unfortunately, this can result in overly conservative behavior. Chance-constrained optimization can be applied to improve the performance of motion planning algorithms by allowing for a user-specified amount of bounded constraint violation. However, state-of-the-art methods rely either on moment-based inequalities, which can be overly conservative, or make it difficult to satisfy assumptions about the class of probability distributions used to model uncertainty. To address these challenges, this work proposes a real-time, risk-aware reachability based motion planning framework called RADIUS. The method first generates a reachable set of parameterized trajectories for the robot offline. At run time, RADIUS computes a closed-form over-approximation of the risk of a collision with an obstacle. This is done without restricting the probability distribution used to model uncertainty to a simple class (e.g., Gaussian). Then, RADIUS performs real-time optimization to construct a trajectory that can be followed by the robot in a manner that is certified to have a risk of collision that is less than or equal to a user-specified threshold. The proposed algorithm is compared to several state-of-the-art chance-constrained and deterministic methods in simulation, and is shown to consistently outperform them in a variety of driving scenarios. A demonstration of the proposed framework on hardware is also provided.
Design and Characterization of 3D Printed, Open-Source Actuators for Legged Locomotion
Feb 24, 2022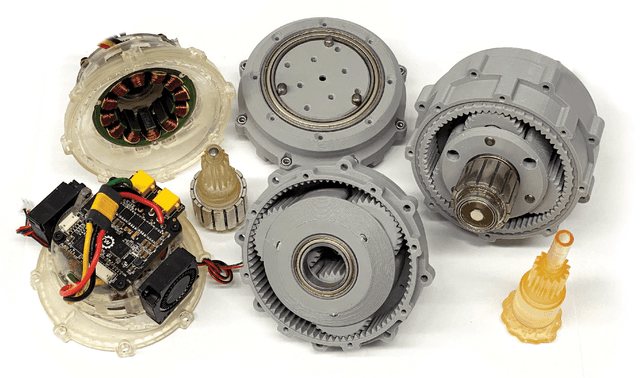
Impressive animal locomotion capabilities are mediated by the co-evolution of the skeletal morphology and muscular properties. Legged robot performance would also likely benefit from the co-optimization of actuators and leg morphology. However, development of custom actuators for legged robots is often expensive and time consuming, which discourages roboticists from pursuing performance gains afforded by application-specific actuator optimization. This paper presents open-source designs for two quasi-direct-drive actuators with performance regimes appropriate for an 8--15 kg robot, built completely with off the shelf and 3D-printed components for less than $200 USD each. The mechanical, electrical, and thermal properties of each actuator are characterized and compared to benchmark data. Actuators subjected to 420k strides of gait data experienced only a 2% reduction in efficiency and 26 mrad in backlash growth, demonstrating viability for rigorous and sustained research applications. We present a thermal solution that nearly doubles the thermally-driven torque limits of our plastic actuator design. The performance results are comparable to traditional metallic actuators for use in high-speed legged robots of the same scale. These 3D printed designs demonstrate an approach for designing and characterizing low-cost, highly customizable, and highly reproducible actuators, democratizing the field of actuator design and enabling co-design and optimization of actuators and robot legs.
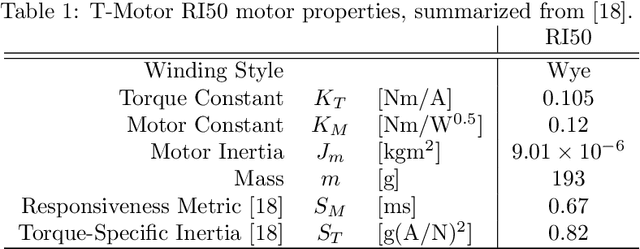
Alternative Metrics to Select Motors for Quasi-Direct Drive Actuators
Feb 24, 2022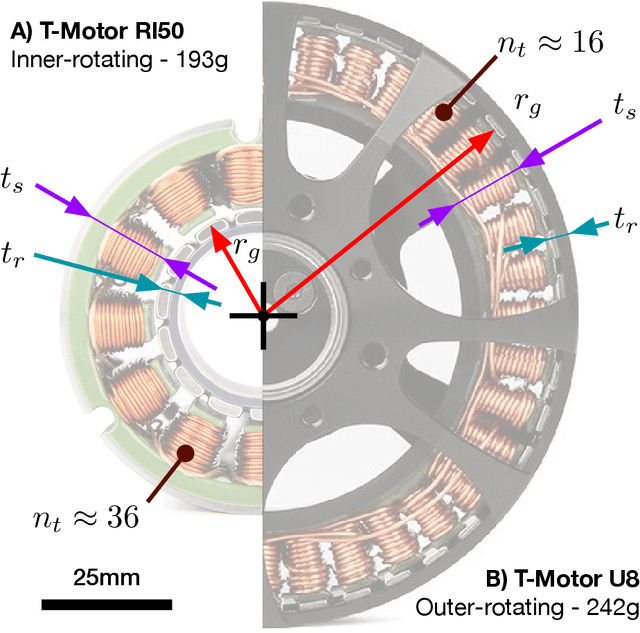
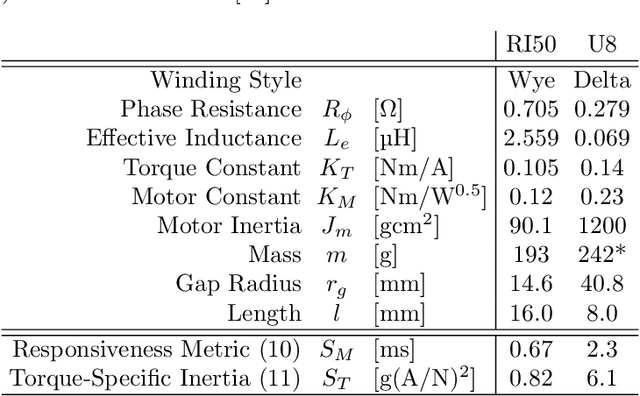
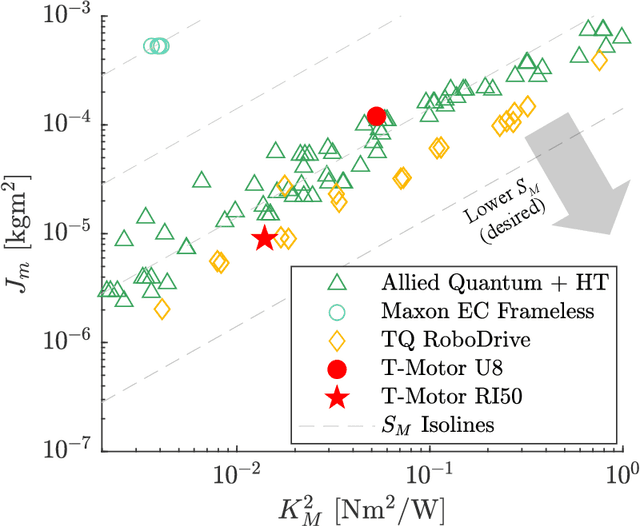
Robotic systems for legged locomotion -- including legged robots, exoskeletons, and prosthetics -- require actuators with low inertia and high output torque. Traditionally, motors have been selected for these applications by maximizing the motor gap radius. We present alternative metrics for motor selection that are invariant to transmission ratio. The proposed metrics reward minimizing the motor inertia while maximizing the torque and motor constants without special consideration for gap radius, providing a better balance of properties for legged locomotion applications. We rigorously characterize the T-Motor RI50 and demonstrate the use of the metrics by comparing the RI50 to the widely-used T-Motor U8 as a case study.