 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Gait Phase and Task Estimation for Controlling a Powered Ankle Exoskeleton on Extremely Uneven Terrain
May 06, 2022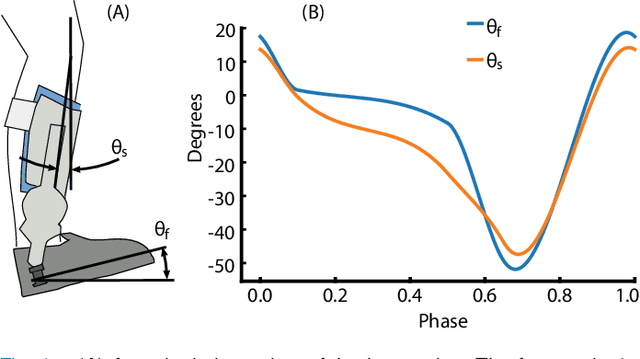
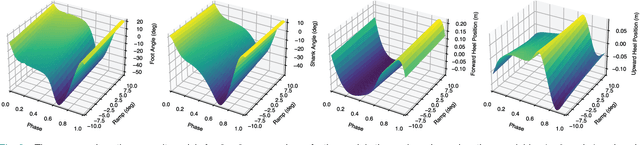
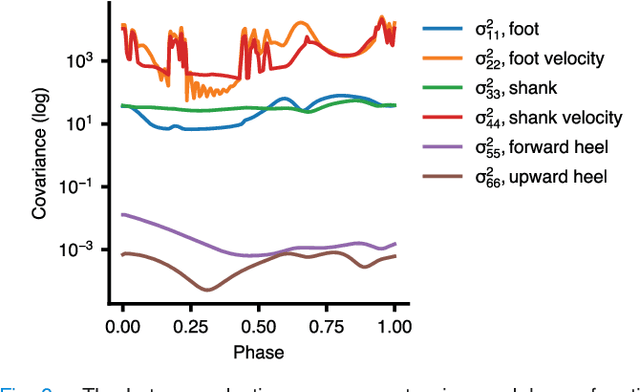
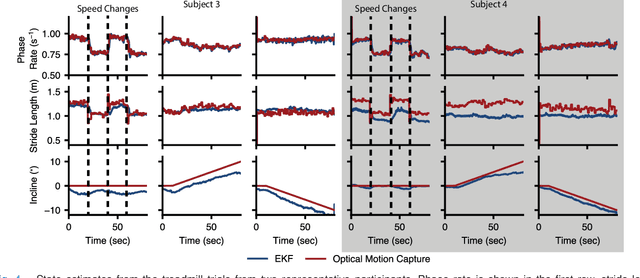
Positive biomechanical outcomes have been reported with lower-limb exoskeletons in laboratory settings, but these devices have difficulty delivering appropriate assistance in synchrony with human gait as the task or rate of phase progression change in real-world environments. This paper presents a torque controller for an ankle exoskeleton that uses state estimation with a data-driven kinematic model to continuously estimate the phase, phase rate, stride length, and ramp parameters during locomotion. The controller applies torque assistance based on the estimated phase and adapts the torque profile based on the estimated task variables to match human torques observed in a multi-activity database of 10 able-bodied subjects. We demonstrate in silico that the controller yields phase estimates that are more accurate than state of the art, while also estimating task variables with comparable accuracy to recent machine learning approaches. The controller implemented in an ankle exoskeleton successfully adapts its assistance in response to changing phase and task variables, both during controlled treadmill trials (6 able-bodied subjects) and a real-world stress test with extremely uneven terrain.
Design and Characterization of 3D Printed, Open-Source Actuators for Legged Locomotion
Feb 24, 2022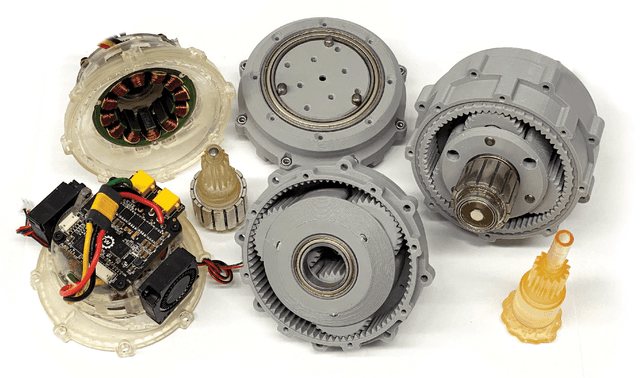
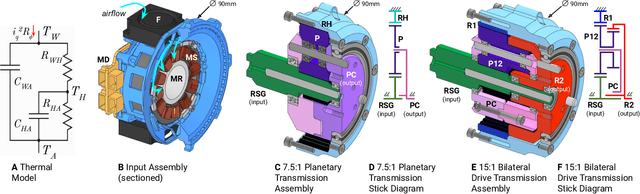
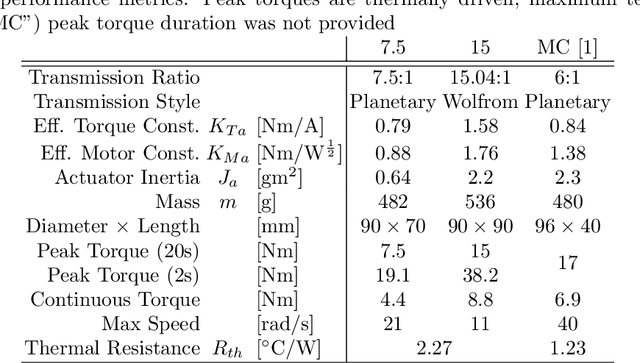
Impressive animal locomotion capabilities are mediated by the co-evolution of the skeletal morphology and muscular properties. Legged robot performance would also likely benefit from the co-optimization of actuators and leg morphology. However, development of custom actuators for legged robots is often expensive and time consuming, which discourages roboticists from pursuing performance gains afforded by application-specific actuator optimization. This paper presents open-source designs for two quasi-direct-drive actuators with performance regimes appropriate for an 8--15 kg robot, built completely with off the shelf and 3D-printed components for less than $200 USD each. The mechanical, electrical, and thermal properties of each actuator are characterized and compared to benchmark data. Actuators subjected to 420k strides of gait data experienced only a 2% reduction in efficiency and 26 mrad in backlash growth, demonstrating viability for rigorous and sustained research applications. We present a thermal solution that nearly doubles the thermally-driven torque limits of our plastic actuator design. The performance results are comparable to traditional metallic actuators for use in high-speed legged robots of the same scale. These 3D printed designs demonstrate an approach for designing and characterizing low-cost, highly customizable, and highly reproducible actuators, democratizing the field of actuator design and enabling co-design and optimization of actuators and robot legs.
Alternative Metrics to Select Motors for Quasi-Direct Drive Actuators
Feb 24, 2022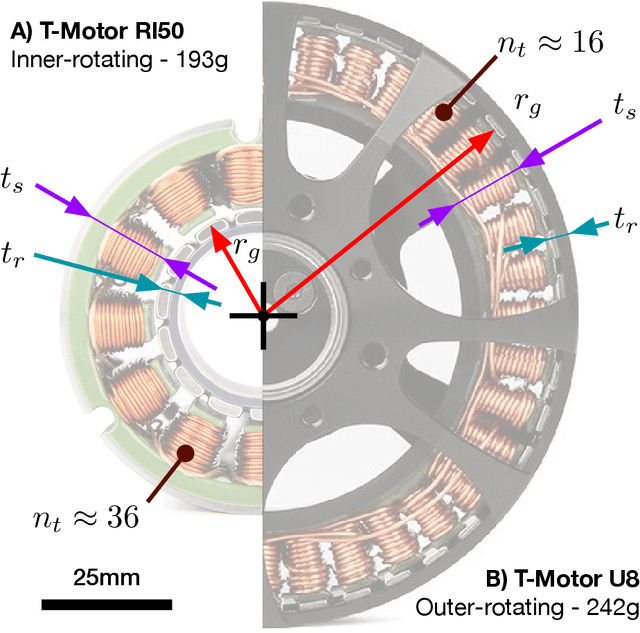
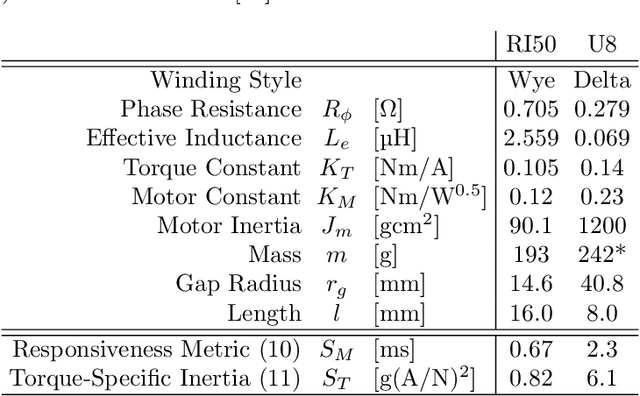
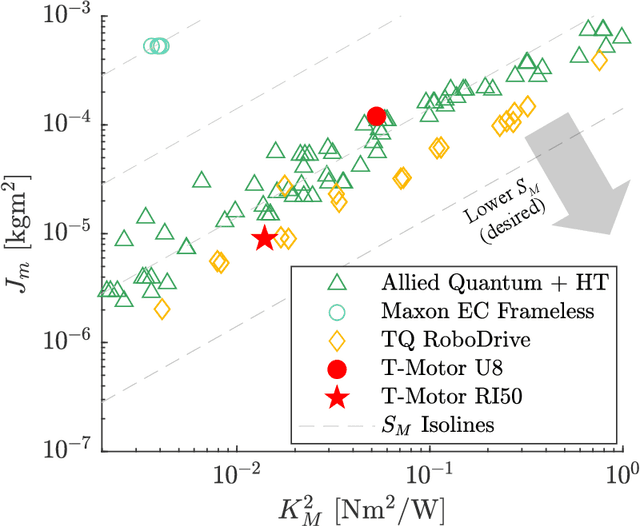
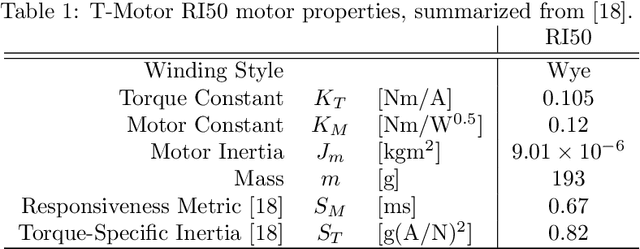
Robotic systems for legged locomotion -- including legged robots, exoskeletons, and prosthetics -- require actuators with low inertia and high output torque. Traditionally, motors have been selected for these applications by maximizing the motor gap radius. We present alternative metrics for motor selection that are invariant to transmission ratio. The proposed metrics reward minimizing the motor inertia while maximizing the torque and motor constants without special consideration for gap radius, providing a better balance of properties for legged locomotion applications. We rigorously characterize the T-Motor RI50 and demonstrate the use of the metrics by comparing the RI50 to the widely-used T-Motor U8 as a case study.
Enhancing Voluntary Motion with Modular, Backdrivable, Powered Hip and Knee Orthoses
Oct 04, 2021
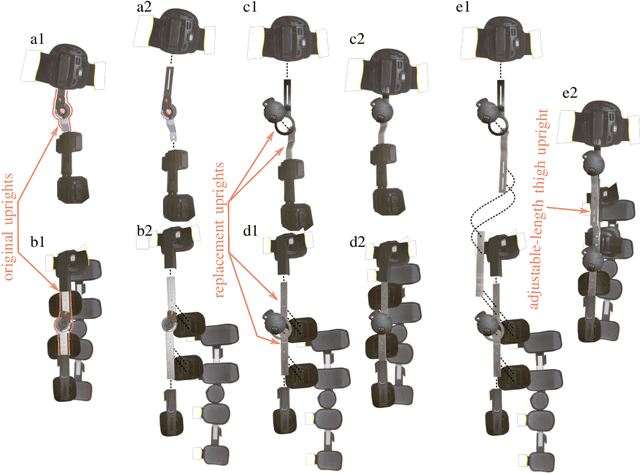
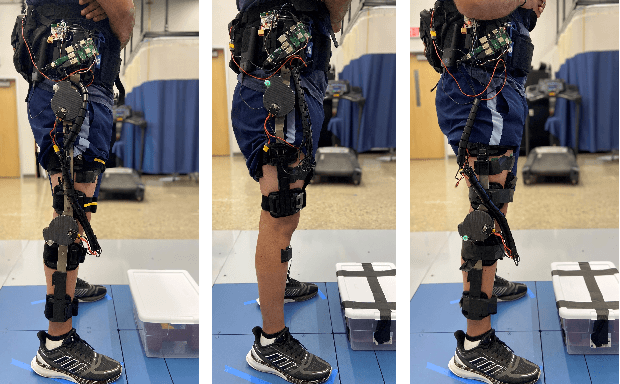
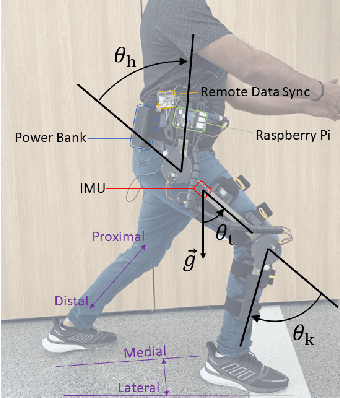
Mobility disabilities are prominent in society with wide-ranging detriments to affected individuals. Addressing the specific deficits of individuals within this heterogeneous population requires modular, partial-assist, lower-limb exoskeletons. This paper introduces the Modular Backdrivable Lower-limb Unloading Exoskeleton (M-BLUE), which implements high torque, low mechanical impedance actuators on commercial orthoses with sheet metal modifications to produce a variety of hip- and/or knee-assisting configurations. Benchtop system identification verifies the desirable backdrive properties of the actuator, and allows for torque prediction within 0.4 Nm. An able-bodied human subject experiment demonstrates that three unilateral configurations of M-BLUE (hip only, knee only, and hip-knee) with a simple gravity compensation controller can reduce muscle EMG readings in a lifting and lowering task relative to the bare condition. Reductions in mean muscular effort and peak muscle activation were seen across the primary squat musculature (excluding biceps femoris), demonstrating the potential to reduce fatigue leading to poor lifting posture. These promising results motivate applications of M-BLUE to additional subject populations such as hip/knee osteoarthritis and geriatric frailty, and the expansion of M-BLUE to bilateral and ankle configurations.