 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Evaluate Autonomous Behaviour in Human-Robot Interaction
Jul 08, 2025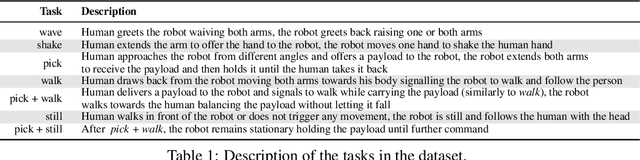


Evaluating and comparing the performance of autonomous Humanoid Robots is challenging, as success rate metrics are difficult to reproduce and fail to capture the complexity of robot movement trajectories, critical in Human-Robot Interaction and Collaboration (HRIC). To address these challenges, we propose a general evaluation framework that measures the quality of Imitation Learning (IL) methods by focusing on trajectory performance. We devise the Neural Meta Evaluator (NeME), a deep learning model trained to classify actions from robot joint trajectories. NeME serves as a meta-evaluator to compare the performance of robot control policies, enabling policy evaluation without requiring human involvement in the loop. We validate our framework on ergoCub, a humanoid robot, using teleoperation data and comparing IL methods tailored to the available platform. The experimental results indicate that our method is more aligned with the success rate obtained on the robot than baselines, offering a reproducible, systematic, and insightful means for comparing the performance of multimodal imitation learning approaches in complex HRI tasks.
XBG: End-to-end Imitation Learning for Autonomous Behaviour in Human-Robot Interaction and Collaboration
Jun 22, 2024



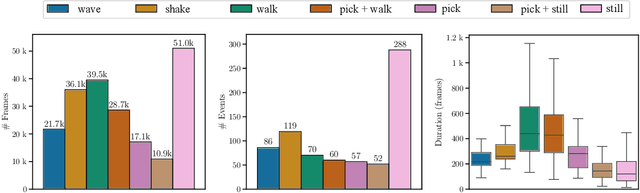
This paper presents XBG (eXteroceptive Behaviour Generation), a multimodal end-to-end Imitation Learning (IL) system for a whole-body autonomous humanoid robot used in real-world Human-Robot Interaction (HRI) scenarios. The main contribution of this paper is an architecture for learning HRI behaviours using a data-driven approach. Through teleoperation, a diverse dataset is collected, comprising demonstrations across multiple HRI scenarios, including handshaking, handwaving, payload reception, walking, and walking with a payload. After synchronizing, filtering, and transforming the data, different Deep Neural Networks (DNN) models are trained. The final system integrates different modalities comprising exteroceptive and proprioceptive sources of information to provide the robot with an understanding of its environment and its own actions. The robot takes sequence of images (RGB and depth) and joints state information during the interactions and then reacts accordingly, demonstrating learned behaviours. By fusing multimodal signals in time, we encode new autonomous capabilities into the robotic platform, allowing the understanding of context changes over time. The models are deployed on ergoCub, a real-world humanoid robot, and their performance is measured by calculating the success rate of the robot's behaviour under the mentioned scenarios.