 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Evaluate Autonomous Behaviour in Human-Robot Interaction
Paper and Code
Jul 08, 2025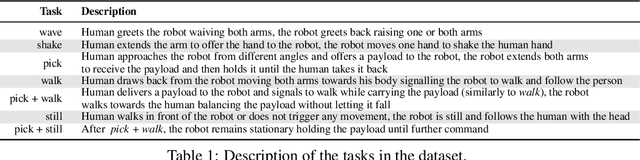


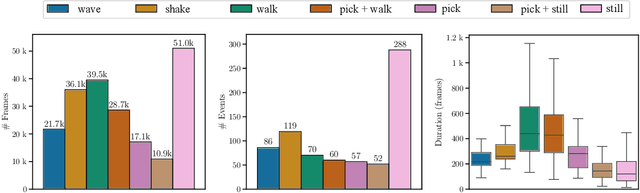
Evaluating and comparing the performance of autonomous Humanoid Robots is challenging, as success rate metrics are difficult to reproduce and fail to capture the complexity of robot movement trajectories, critical in Human-Robot Interaction and Collaboration (HRIC). To address these challenges, we propose a general evaluation framework that measures the quality of Imitation Learning (IL) methods by focusing on trajectory performance. We devise the Neural Meta Evaluator (NeME), a deep learning model trained to classify actions from robot joint trajectories. NeME serves as a meta-evaluator to compare the performance of robot control policies, enabling policy evaluation without requiring human involvement in the loop. We validate our framework on ergoCub, a humanoid robot, using teleoperation data and comparing IL methods tailored to the available platform. The experimental results indicate that our method is more aligned with the success rate obtained on the robot than baselines, offering a reproducible, systematic, and insightful means for comparing the performance of multimodal imitation learning approaches in complex HRI tasks.