 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAugmented-Reality Enabled Crop Monitoring with Robot Assistance
Nov 05, 2024



The integration of augmented reality (AR), extended reality (XR), and virtual reality (VR) technologies in agriculture has shown significant promise in enhancing various agricultural practices. Mobile robots have also been adopted as assessment tools in precision agriculture, improving economic efficiency and productivity, and minimizing undesired effects such as weeds and pests. Despite considerable work on both fronts, the combination of a versatile User Interface (UI) provided by an AR headset with the integration and direct interaction and control of a mobile field robot has not yet been fully explored or standardized. This work aims to address this gap by providing real-time data input and control output of a mobile robot for precision agriculture through a virtual environment enabled by an AR headset interface. The system leverages open-source computational tools and off-the-shelf hardware for effective integration. Distinctive case studies are presented where growers or technicians can interact with a legged robot via an AR headset and a UI. Users can teleoperate the robot to gather information in an area of interest, request real-time graphed status of an area, or have the robot autonomously navigate to selected areas for measurement updates. The proposed system utilizes a custom local navigation method with a fixed holographic coordinate system in combination with QR codes. This step toward fusing AR and robotics in agriculture aims to provide practical solutions for real-time data management and control enabled by human-robot interaction. The implementation can be extended to various robot applications in agriculture and beyond, promoting a unified framework for on-demand and autonomous robot operation in the field.
Vision-based Xylem Wetness Classification in Stem Water Potential Determination
Sep 24, 2024



Water is often overused in irrigation, making efficient management of it crucial. Precision Agriculture emphasizes tools like stem water potential (SWP) analysis for better plant status determination. However, such tools often require labor-intensive in-situ sampling. Automation and machine learning can streamline this process and enhance outcomes. This work focused on automating stem detection and xylem wetness classification using the Scholander Pressure Chamber, a widely used but demanding method for SWP measurement. The aim was to refine stem detection and develop computer-vision-based methods to better classify water emergence at the xylem. To this end, we collected and manually annotated video data, applying vision- and learning-based methods for detection and classification. Additionally, we explored data augmentation and fine-tuned parameters to identify the most effective models. The identified best-performing models for stem detection and xylem wetness classification were evaluated end-to-end over 20 SWP measurements. Learning-based stem detection via YOLOv8n combined with ResNet50-based classification achieved a Top-1 accuracy of 80.98%, making it the best-performing approach for xylem wetness classification.
Vision-assisted Avocado Harvesting with Aerial Bimanual Manipulation
Aug 17, 2024



Robotic fruit harvesting holds potential in precision agriculture to improve harvesting efficiency. While ground mobile robots are mostly employed in fruit harvesting, certain crops, like avocado trees, cannot be harvested efficiently from the ground alone. This is because of unstructured ground and planting arrangement and high-to-reach fruits. In such cases, aerial robots integrated with manipulation capabilities can pave new ways in robotic harvesting. This paper outlines the design and implementation of a bimanual UAV that employs visual perception and learning to autonomously detect avocados, reach, and harvest them. The dual-arm system comprises a gripper and a fixer arm, to address a key challenge when harvesting avocados: once grasped, a rotational motion is the most efficient way to detach the avocado from the peduncle; however, the peduncle may store elastic energy preventing the avocado from being harvested. The fixer arm aims to stabilize the peduncle, allowing the gripper arm to harvest. The integrated visual perception process enables the detection of avocados and the determination of their pose; the latter is then used to determine target points for a bimanual manipulation planner. Several experiments are conducted to assess the efficacy of each component, and integrated experiments assess the effectiveness of the system.
Force Profiling of a Shoulder Bidirectional Fabric-based Pneumatic Actuator for a Pediatric Exosuit
Jul 17, 2024



This paper presents a comprehensive analysis of the contact force profile of a single-cell bidirectional soft pneumatic actuator, specifically designed to aid in the abduction and adduction of the shoulder for pediatric exosuits. The actuator was embedded in an infant-scale test rig featuring two degrees of freedom: an actuated revolute joint supporting shoulder abduction/adduction and a passive (but lockable) revolute joint supporting elbow flexion/extension. Integrated load cells and an encoder within the rig were used to measure the force applied by the actuator and the shoulder joint angle, respectively. The actuator's performance was evaluated under various anchoring points and elbow joint angles. Experimental results demonstrate that optimal performance, characterized by maximum range of motion and minimal force applied on the torso and upper arm, can be achieved when the actuator is anchored at two-thirds the length of the upper arm, with the elbow joint positioned at a 90-degree angle. The force versus pressure and joint angle graphs reveal nonlinear and hysteresis behaviors. The findings of this study yield insights about optimal anchoring points and elbow angles to minimize exerted forces without reducing the range of motion.
A Fabric-based Pneumatic Actuator for the Infant Elbow: Design and Comparative Kinematic Analysis
Oct 26, 2023



This paper focuses on the design and systematic evaluation of fabric-based, bellow-type soft pneumatic actuators to assist with flexion and extension of the elbow, intended for use in infant wearable devices. Initially, the performance of a range of actuator variants was explored via simulation. The actuator variants were parameterized based on the shape, number, and size of the cells present. Subsequently, viable actuator variants identified from the simulations were fabricated and underwent further testing on a physical model based on an infant's body anthropometrics. The performance of these variants was evaluated based on kinematic analyses using metrics including movement smoothness, path length, and elbow joint angle. Internal pressure of the actuators was also attained. Taken together, results reported herein provide valuable insights about the suitability of several actuator designs to serve as components for pediatric wearable assistive devices.
A Bidirectional Fabric-based Pneumatic Actuator for the Infant Shoulder: Design and Comparative Kinematic Analysis
Jun 21, 2022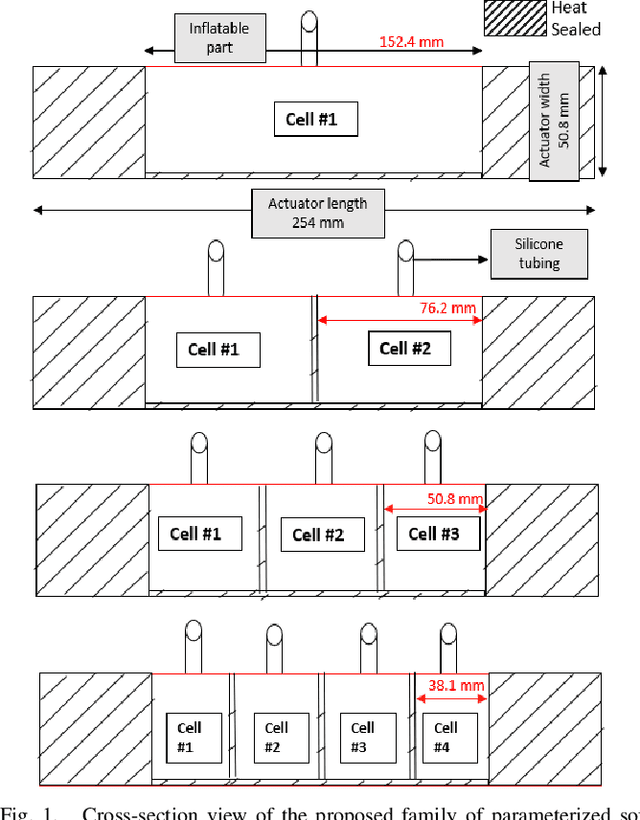
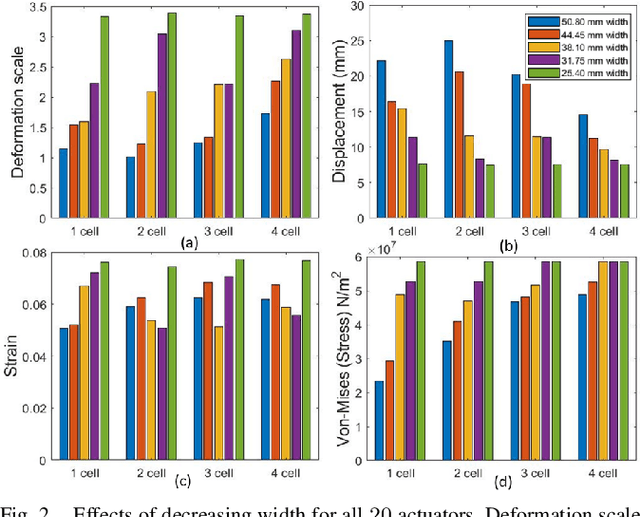
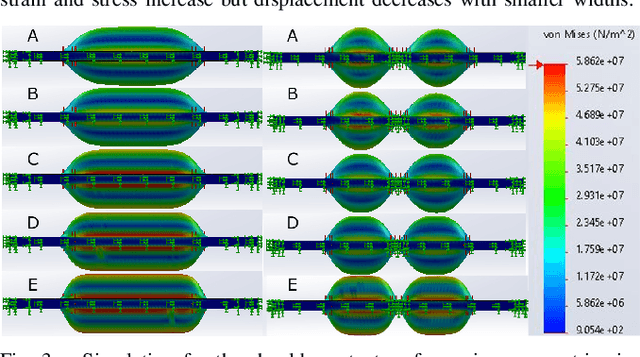
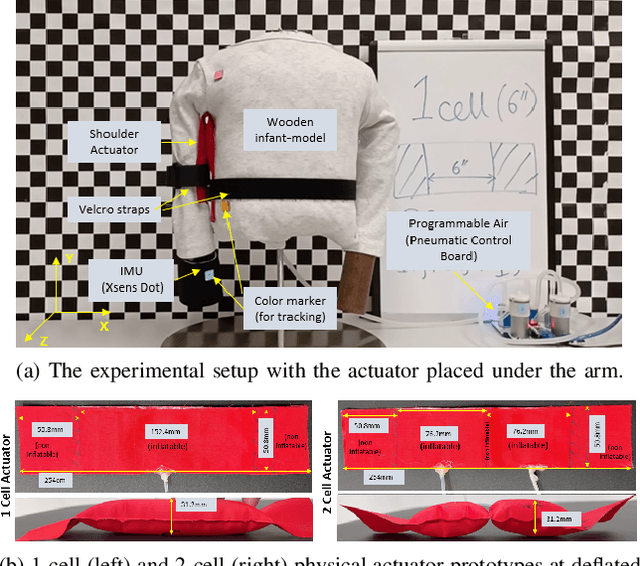
This paper presents the design and assessment of a fabric-based soft pneumatic actuator with low pressurization requirements for actuation making it suitable for upper extremity assistive devices for infants. The goal is to support shoulder abduction and adduction without prohibiting motion in other planes or obstructing elbow joint motion. First, the performance of a family of actuator designs with internal air cells is explored via simulation. The actuators are parameterized by the number of cells and their width. Physically viable actuator variants identified through the simulation are further tested via hardware experiments. Two designs are selected and tested on a custom-built physical model based on an infant's body anthropometrics. Comparisons between force exerted to lift the arm, movement smoothness, path length and maximum shoulder angle reached inform which design is better suited for its use as an actuator for pediatric wearable assistive devices, along with other insights for future work.
Online Modeling and Control of Soft Multi-fingered Grippers via Koopman Operator Theory
Jun 21, 2022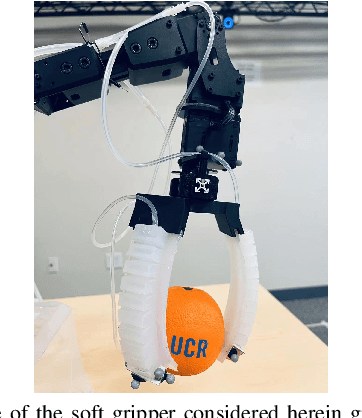
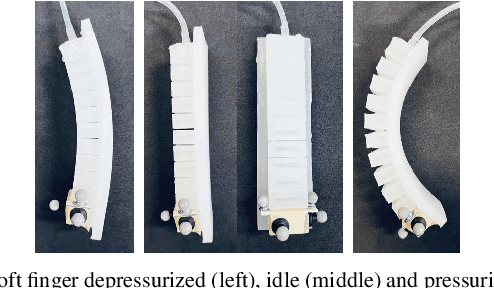
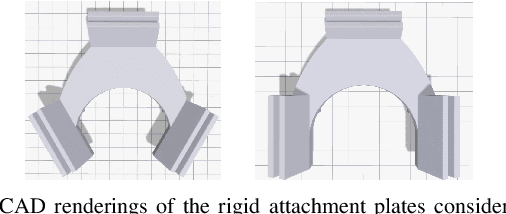
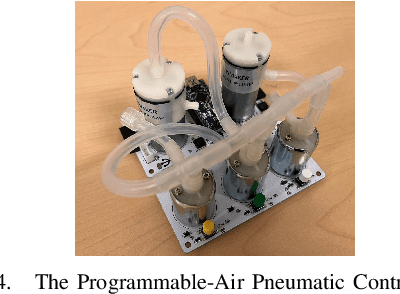
Soft grippers are gaining momentum across applications due to their flexibility and dexterity. However, the infinite-dimensionality and non-linearity associated with soft robots challenge modeling and closed-loop control of soft grippers to perform grasping tasks. To solve this problem, data-driven methods have been proposed. Most data-driven methods rely on intensive model learning in simulation or offline, and as such it may be hard to generalize across different settings not explicitly trained upon and in physical robot testing where online control is required. In this paper, we propose an online modeling and control algorithm that utilizes Koopman operator theory to update an estimated model of the underlying dynamics at each time step in real-time. The learned and continuously updated models are then embedded into an online Model Predictive Control (MPC) structure and deployed onto soft multi-fingered robotic grippers. To evaluate the performance, the prediction accuracy of our approach is first compared against other model-extraction methods among different datasets. Next, the online modeling and control algorithm is tested experimentally with a soft 3-fingered gripper grasping objects of various shapes and weights unknown to the controller initially. Results indicate a high success ratio in grasping different objects using the proposed method. Sample trials can be viewed at https://youtu.be/i2hCMX7zSKQ.
Closed-loop Position Control of a Pediatric Soft Robotic Wearable Device for Upper Extremity Assistance
Jun 16, 2022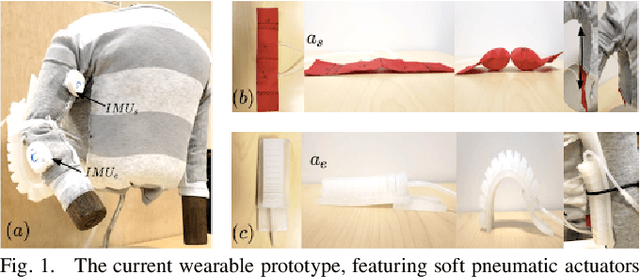
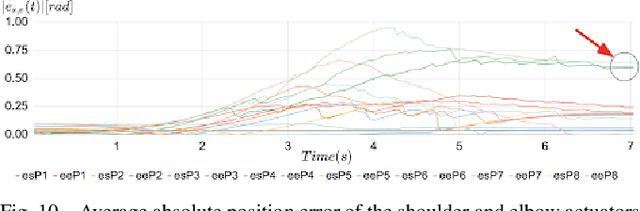
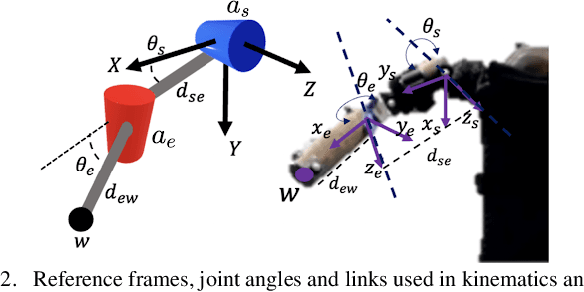
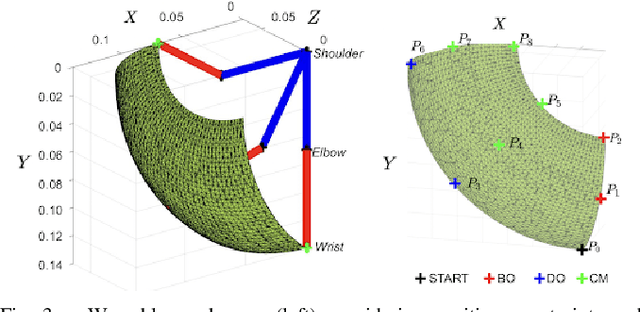
This work focuses on closed-loop control based on proprioceptive feedback for a pneumatically-actuated soft wearable device aimed at future support of infant reaching tasks. The device comprises two soft pneumatic actuators (one textile-based and one silicone-casted) actively controlling two degrees-of-freedom per arm (shoulder adduction/abduction and elbow flexion/extension, respectively). Inertial measurement units (IMUs) attached to the wearable device provide real-time joint angle feedback. Device kinematics analysis is informed by anthropometric data from infants (arm lengths) reported in the literature. Range of motion and muscle co-activation patterns in infant reaching are considered to derive desired trajectories for the device's end-effector. Then, a proportional-derivative controller is developed to regulate the pressure inside the actuators and in turn move the arm along desired setpoints within the reachable workspace. Experimental results on tracking desired arm trajectories using an engineered mannequin are presented, demonstrating that the proposed controller can help guide the mannequin's wrist to the desired setpoints.
* 6 pages