 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbodied Neurocomputation: A Framework for Interfacing Biological Neural Cultures with Scaled Task-Driven Validation
May 13, 2026Biological neural networks (BNNs) have been established as a powerful and adaptive substrate that offer the potential for incredibly energy and data efficient information processing with distinct learning mechanisms. Yet a core challenge to utilizing BNN for neurocomputation is determining the optimal encoding and decoding mechanisms between the traditional silicon computing interface and the living biology. Here, we propose an Embodied Neurocomputation framework as a systems-level approach to this multi-variable optimization encoding/decoding problem. We operationalize this approach through the first large-scale parameter optimization of encoding configurations for a BNN agent performing closed-loop navigation along an odor-style gradient in a simulated grid-world. Despite the relative simplicity of the task, the biological interactions gave rise to a massive multi-combinatorial search space for optimal parameters. By considering how the components of the system are interconnected and parameterized, we evaluated approximately 1,300 parameter combinations, over 4,000 hours of real-time agent-environment interactions, to identify 12 configurations that consistently demonstrated learning across multiple episodes. These configurations achieved significantly higher task performances than optimized silicon-based DQN agents under the same interaction budget. These findings represent an initial step toward robust and scalable goal-oriented learning using BNNs. Our framework establishes a foundation for applying task-driven neurocomputing and supports the development of field-wide benchmarks. In the long term, this work supports the development of hybrid bio-silicon architectures capable of efficient, adaptive and real-time computation, including the potential for robotic control applications.
To Help or Not to Help: LLM-based Attentive Support for Human-Robot Group Interactions
Mar 19, 2024How can a robot provide unobtrusive physical support within a group of humans? We present Attentive Support, a novel interaction concept for robots to support a group of humans. It combines scene perception, dialogue acquisition, situation understanding, and behavior generation with the common-sense reasoning capabilities of Large Language Models (LLMs). In addition to following user instructions, Attentive Support is capable of deciding when and how to support the humans, and when to remain silent to not disturb the group. With a diverse set of scenarios, we show and evaluate the robot's attentive behavior, which supports and helps the humans when required, while not disturbing if no help is needed.
Large Language and Text-to-3D Models for Engineering Design Optimization
Jul 03, 2023



The current advances in generative AI for learning large neural network models with the capability to produce essays, images, music and even 3D assets from text prompts create opportunities for a manifold of disciplines. In the present paper, we study the potential of deep text-to-3D models in the engineering domain, with focus on the chances and challenges when integrating and interacting with 3D assets in computational simulation-based design optimization. In contrast to traditional design optimization of 3D geometries that often searches for the optimum designs using numerical representations, such as B-Spline surface or deformation parameters in vehicle aerodynamic optimization, natural language challenges the optimization framework by requiring a different interpretation of variation operators while at the same time may ease and motivate the human user interaction. Here, we propose and realize a fully automated evolutionary design optimization framework using Shap-E, a recently published text-to-3D asset network by OpenAI, in the context of aerodynamic vehicle optimization. For representing text prompts in the evolutionary optimization, we evaluate (a) a bag-of-words approach based on prompt templates and Wordnet samples, and (b) a tokenisation approach based on prompt templates and the byte pair encoding method from GPT4. Our main findings from the optimizations indicate that, first, it is important to ensure that the designs generated from prompts are within the object class of application, i.e. diverse and novel designs need to be realistic, and, second, that more research is required to develop methods where the strength of text prompt variations and the resulting variations of the 3D designs share causal relations to some degree to improve the optimization.
Knowledge Transfer for Dynamic Multi-objective Optimization with a Changing Number of Objectives
Jun 19, 2023



Different from most other dynamic multi-objective optimization problems (DMOPs), DMOPs with a changing number of objectives usually result in expansion or contraction of the Pareto front or Pareto set manifold. Knowledge transfer has been used for solving DMOPs, since it can transfer useful information from solving one problem instance to solve another related problem instance. However, we show that the state-of-the-art transfer algorithm for DMOPs with a changing number of objectives lacks sufficient diversity when the fitness landscape and Pareto front shape present nonseparability, deceptiveness or other challenging features. Therefore, we propose a knowledge transfer dynamic multi-objective evolutionary algorithm (KTDMOEA) to enhance population diversity after changes by expanding/contracting the Pareto set in response to an increase/decrease in the number of objectives. This enables a solution set with good convergence and diversity to be obtained after optimization. Comprehensive studies using 13 DMOP benchmarks with a changing number of objectives demonstrate that our proposed KTDMOEA is successful in enhancing population diversity compared to state-of-the-art algorithms, improving optimization especially in fast changing environments.
A Novel Generalised Meta-Heuristic Framework for Dynamic Capacitated Arc Routing Problems
Apr 14, 2021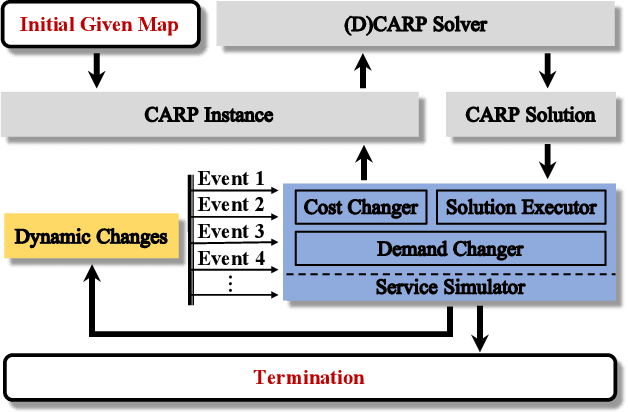
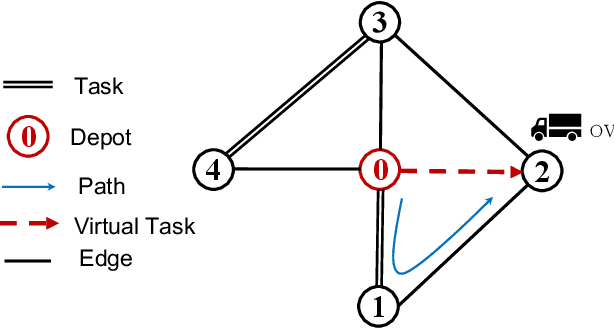
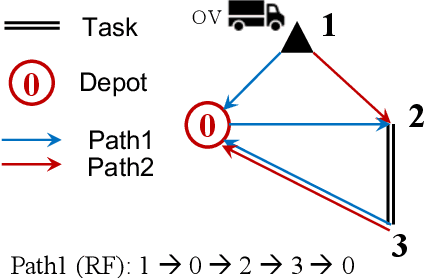
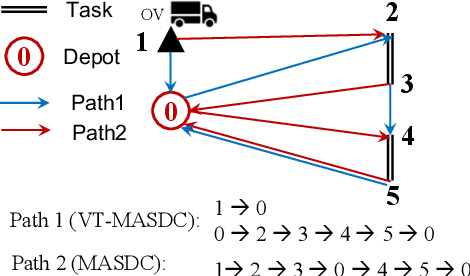
The capacitated arc routing problem (CARP) is a challenging combinatorial optimisation problem abstracted from typical real-world applications, like waste collection and mail delivery. However, few studies considered dynamic changes during the vehicles' service, which can make the original schedule infeasible or obsolete. The few existing studies are limited by dynamic scenarios that can suffer single types of dynamic events, and by algorithms that rely on special operators or representations, being unable to benefit from the wealth of contributions provided by the static CARP literature. Here, we provide the first mathematical formulation for dynamic CARP (DCARP) and design a simulation system to execute the CARP solutions and generate DCARP instances with several common dynamic events. We then propose a novel framework able to generalise all existing static CARP optimisation algorithms so that they can cope with DCARP instances. The framework has the option to enhance optimisation performance for DCARP instances based on a restart strategy that makes no use of past history, and a sequence transfer strategy that benefits from past optimisation experience. Empirical studies are conducted on a wide range of DCARP instances. The results highlight the need for tackling dynamic changes and show that the proposed framework significantly improves over existing algorithms.