 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREAR: Rethinking Visual Autoregressive Models via Generator-Tokenizer Consistency Regularization
Oct 06, 2025Visual autoregressive (AR) generation offers a promising path toward unifying vision and language models, yet its performance remains suboptimal against diffusion models. Prior work often attributes this gap to tokenizer limitations and rasterization ordering. In this work, we identify a core bottleneck from the perspective of generator-tokenizer inconsistency, i.e., the AR-generated tokens may not be well-decoded by the tokenizer. To address this, we propose reAR, a simple training strategy introducing a token-wise regularization objective: when predicting the next token, the causal transformer is also trained to recover the visual embedding of the current token and predict the embedding of the target token under a noisy context. It requires no changes to the tokenizer, generation order, inference pipeline, or external models. Despite its simplicity, reAR substantially improves performance. On ImageNet, it reduces gFID from 3.02 to 1.86 and improves IS to 316.9 using a standard rasterization-based tokenizer. When applied to advanced tokenizers, it achieves a gFID of 1.42 with only 177M parameters, matching the performance with larger state-of-the-art diffusion models (675M).
Improving Human Motion Plausibility with Body Momentum
Sep 11, 2025Many studies decompose human motion into local motion in a frame attached to the root joint and global motion of the root joint in the world frame, treating them separately. However, these two components are not independent. Global movement arises from interactions with the environment, which are, in turn, driven by changes in the body configuration. Motion models often fail to precisely capture this physical coupling between local and global dynamics, while deriving global trajectories from joint torques and external forces is computationally expensive and complex. To address these challenges, we propose using whole-body linear and angular momentum as a constraint to link local motion with global movement. Since momentum reflects the aggregate effect of joint-level dynamics on the body's movement through space, it provides a physically grounded way to relate local joint behavior to global displacement. Building on this insight, we introduce a new loss term that enforces consistency between the generated momentum profiles and those observed in ground-truth data. Incorporating our loss reduces foot sliding and jitter, improves balance, and preserves the accuracy of the recovered motion. Code and data are available at the project page https://hlinhn.github.io/momentum_bmvc.
DD-Ranking: Rethinking the Evaluation of Dataset Distillation
May 19, 2025
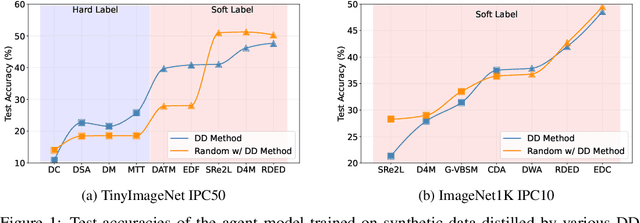
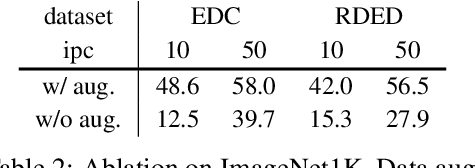
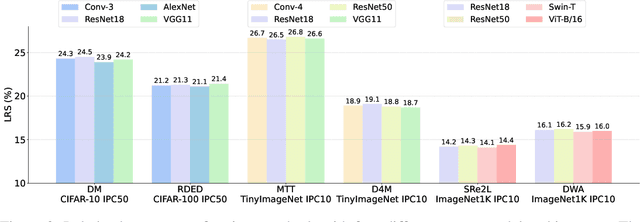
In recent years, dataset distillation has provided a reliable solution for data compression, where models trained on the resulting smaller synthetic datasets achieve performance comparable to those trained on the original datasets. To further improve the performance of synthetic datasets, various training pipelines and optimization objectives have been proposed, greatly advancing the field of dataset distillation. Recent decoupled dataset distillation methods introduce soft labels and stronger data augmentation during the post-evaluation phase and scale dataset distillation up to larger datasets (e.g., ImageNet-1K). However, this raises a question: Is accuracy still a reliable metric to fairly evaluate dataset distillation methods? Our empirical findings suggest that the performance improvements of these methods often stem from additional techniques rather than the inherent quality of the images themselves, with even randomly sampled images achieving superior results. Such misaligned evaluation settings severely hinder the development of DD. Therefore, we propose DD-Ranking, a unified evaluation framework, along with new general evaluation metrics to uncover the true performance improvements achieved by different methods. By refocusing on the actual information enhancement of distilled datasets, DD-Ranking provides a more comprehensive and fair evaluation standard for future research advancements.
Visual Intention Grounding for Egocentric Assistants
Apr 18, 2025Visual grounding associates textual descriptions with objects in an image. Conventional methods target third-person image inputs and named object queries. In applications such as AI assistants, the perspective shifts -- inputs are egocentric, and objects may be referred to implicitly through needs and intentions. To bridge this gap, we introduce EgoIntention, the first dataset for egocentric visual intention grounding. EgoIntention challenges multimodal LLMs to 1) understand and ignore unintended contextual objects and 2) reason about uncommon object functionalities. Benchmark results show that current models misidentify context objects and lack affordance understanding in egocentric views. We also propose Reason-to-Ground (RoG) instruction tuning; it enables hybrid training with normal descriptions and egocentric intentions with a chained intention reasoning and object grounding mechanism. RoG significantly outperforms naive finetuning and hybrid training on EgoIntention, while maintaining or slightly improving naive description grounding. This advancement enables unified visual grounding for egocentric and exocentric visual inputs while handling explicit object queries and implicit human intentions.
Analyzing the Synthetic-to-Real Domain Gap in 3D Hand Pose Estimation
Mar 25, 2025



Recent synthetic 3D human datasets for the face, body, and hands have pushed the limits on photorealism. Face recognition and body pose estimation have achieved state-of-the-art performance using synthetic training data alone, but for the hand, there is still a large synthetic-to-real gap. This paper presents the first systematic study of the synthetic-to-real gap of 3D hand pose estimation. We analyze the gap and identify key components such as the forearm, image frequency statistics, hand pose, and object occlusions. To facilitate our analysis, we propose a data synthesis pipeline to synthesize high-quality data. We demonstrate that synthetic hand data can achieve the same level of accuracy as real data when integrating our identified components, paving the path to use synthetic data alone for hand pose estimation. Code and data are available at: https://github.com/delaprada/HandSynthesis.git.
Condensing Action Segmentation Datasets via Generative Network Inversion
Mar 18, 2025



This work presents the first condensation approach for procedural video datasets used in temporal action segmentation. We propose a condensation framework that leverages generative prior learned from the dataset and network inversion to condense data into compact latent codes with significant storage reduced across temporal and channel aspects. Orthogonally, we propose sampling diverse and representative action sequences to minimize video-wise redundancy. Our evaluation on standard benchmarks demonstrates consistent effectiveness in condensing TAS datasets and achieving competitive performances. Specifically, on the Breakfast dataset, our approach reduces storage by over 500$\times$ while retaining 83% of the performance compared to training with the full dataset. Furthermore, when applied to a downstream incremental learning task, it yields superior performance compared to the state-of-the-art.
Online Test-time Adaptation for 3D Human Pose Estimation: A Practical Perspective with Estimated 2D Poses
Mar 14, 2025



Online test-time adaptation for 3D human pose estimation is used for video streams that differ from training data. Ground truth 2D poses are used for adaptation, but only estimated 2D poses are available in practice. This paper addresses adapting models to streaming videos with estimated 2D poses. Comparing adaptations reveals the challenge of limiting estimation errors while preserving accurate pose information. To this end, we propose adaptive aggregation, a two-stage optimization, and local augmentation for handling varying levels of estimated pose error. First, we perform adaptive aggregation across videos to initialize the model state with labeled representative samples. Within each video, we use a two-stage optimization to benefit from 2D fitting while minimizing the impact of erroneous updates. Second, we employ local augmentation, using adjacent confident samples to update the model before adapting to the current non-confident sample. Our method surpasses state-of-the-art by a large margin, advancing adaptation towards more practical settings of using estimated 2D poses.
EgoBlind: Towards Egocentric Visual Assistance for the Blind People
Mar 11, 2025We present EgoBlind, the first egocentric VideoQA dataset collected from blind individuals to evaluate the assistive capabilities of contemporary multimodal large language models (MLLMs). EgoBlind comprises 1,210 videos that record the daily lives of real blind users from a first-person perspective. It also features 4,927 questions directly posed or generated and verified by blind individuals to reflect their needs for visual assistance under various scenarios. We provide each question with an average of 3 reference answers to alleviate subjective evaluation. Using EgoBlind, we comprehensively evaluate 15 leading MLLMs and find that all models struggle, with the best performers achieving accuracy around 56\%, far behind human performance of 87.4\%. To guide future advancements, we identify and summarize major limitations of existing MLLMs in egocentric visual assistance for the blind and provide heuristic suggestions for improvement. With these efforts, we hope EgoBlind can serve as a valuable foundation for developing more effective AI assistants to enhance the independence of the blind individuals' lives.
Conceptrol: Concept Control of Zero-shot Personalized Image Generation
Mar 09, 2025Personalized image generation with text-to-image diffusion models generates unseen images based on reference image content. Zero-shot adapter methods such as IP-Adapter and OminiControl are especially interesting because they do not require test-time fine-tuning. However, they struggle to balance preserving personalized content and adherence to the text prompt. We identify a critical design flaw resulting in this performance gap: current adapters inadequately integrate personalization images with the textual descriptions. The generated images, therefore, replicate the personalized content rather than adhere to the text prompt instructions. Yet the base text-to-image has strong conceptual understanding capabilities that can be leveraged. We propose Conceptrol, a simple yet effective framework that enhances zero-shot adapters without adding computational overhead. Conceptrol constrains the attention of visual specification with a textual concept mask that improves subject-driven generation capabilities. It achieves as much as 89% improvement on personalization benchmarks over the vanilla IP-Adapter and can even outperform fine-tuning approaches such as Dreambooth LoRA. The source code is available at https://github.com/QY-H00/Conceptrol.
Improving Deep Regression with Tightness
Feb 13, 2025For deep regression, preserving the ordinality of the targets with respect to the feature representation improves performance across various tasks. However, a theoretical explanation for the benefits of ordinality is still lacking. This work reveals that preserving ordinality reduces the conditional entropy $H(Z|Y)$ of representation $Z$ conditional on the target $Y$. However, our findings reveal that typical regression losses do little to reduce $H(Z|Y)$, even though it is vital for generalization performance. With this motivation, we introduce an optimal transport-based regularizer to preserve the similarity relationships of targets in the feature space to reduce $H(Z|Y)$. Additionally, we introduce a simple yet efficient strategy of duplicating the regressor targets, also with the aim of reducing $H(Z|Y)$. Experiments on three real-world regression tasks verify the effectiveness of our strategies to improve deep regression. Code: https://github.com/needylove/Regression_tightness.